一种挂车鹅颈电动转向结构的制作方法
1.本实用新型涉及挂车技术领域,具体动来说,涉及一种挂车鹅颈电动转向结构。
背景技术:
2.当前,鹅颈式挂车被广泛用于运输各种长度、重量、宽度、形状不一的货物中,而长度较长的鹅颈式挂车在运输不可拆卸的长物体时,转弯半径很大,不利于车辆转弯,尤其是在应对比较窄的道路转弯时通过率不高,整体转弯性能一般。
3.而中国专利,公开号cn 202806918 u,公开同步转向的液压重型超限运输挂车,文中提出“包括动力鹅颈、承载货台和行走机构,动力鹅颈的前部设有与牵引车鞍座配合的回转支承,回转支承的左右两侧分别铰接有左右鹅颈转向油缸,行走机构由若干个行走单元拼接而成,所述的行走单元包括左右纵梁,在左右纵梁的下面至少设有一组车桥,每组车桥包括左右两个独立的车桥体,车桥体通过可调悬挂机构装在纵梁上,车桥体的上部设有转向臂,同一纵梁上的车桥体的转
4.向臂通过驱动连杆铰接为一体,在行走机构的前部和/或尾部设有与上述驱动连杆连接的行走转向油缸,同侧的鹅颈转向油缸和行走转向油缸并联设置。”。
5.该现有技术中虽然通过同侧的鹅颈转向油缸和行走转向油缸的并联配合设置,在一定程度上提升了转弯性能,保持了牵引车和挂车车桥转向的协调同步,但是该现有技术结构复杂,且为液压随动转向,由于鹅颈尺寸的限制,最多直接带动2个行走单元,如果带更多的行走单元,则需要增加额外的连杆和连接机构,无法满足多个行走单元平稳、快速地转向的需求,同时,该种液压随动转向的作业模式,其转向的同步性和精准性仍然有所欠缺。
6.为此,需要一种新的技术方案以解决上述技术问题。
技术实现要素:
7.本实用新型的目的在于提供一种挂车鹅颈电动转向结构,以解决上述背景技术中提出的现有挂车鹅颈转向结构,其结构复杂,且无法满足多个行走单元平稳、快速地转向的需求,同时转向的同步性和精准性仍然有所欠缺的技术问题。
8.为实现上述目的,本实用新型采取以下技术方案:
9.一种挂车鹅颈电动转向结构,包括鹅颈和行走机构,所述鹅颈包括牵引销,所述牵引销的旋转角度为-110~110度,所述行走机构至少设有一组,所述行走机构包括车桥转向油缸,所述转向结构还包括与牵引销相配合的齿轮传动机构、以及两个分别与齿轮传动机构和车桥转向油缸相配合的行程传感器,两个所述行程传感器共同电性连接有一plc控制器。
10.进一步的,所述齿轮传动机构包括回转轴承,所述鹅颈还包括鹅颈框架、回转轴承座、以及与牵引销相配合的牵引销固定座,所述plc控制器安装在鹅颈框架上,所述回转轴承包括相对转动的轴承内圈和轴承外圈,所述轴承外圈设置于轴承内圈的外周,所述轴承内圈和轴承外圈之间设有钢球和防尘圈,所述牵引销固定座固定连接在轴承内圈的下方,
所述轴承外圈固定连接在回转轴承座的内壁侧,所述回转轴承座固定连接在鹅颈框架上,所述轴承内圈的内壁侧具有传动齿圈,所述传动齿圈水平啮合有一从动齿轮,所述行程传感器包括行程传感器ⅰ和行程传感器ⅱ,所述从动齿轮可旋转地连接在行程传感器ⅰ的下方,所述行程传感器ⅱ固定安装在车桥转向油缸上,所述从动齿轮包括与传动齿圈水平啮合的齿轮部、以及一体式垂直连接在齿轮部上方的轴体部,所述轴体部的另一端与行程传感器ⅰ相连接。
11.与现有技术相比,本实用新型的有益效果是:
12.1.本实用新型中通过牵引销与齿轮传动机构的配合设置,再通过两个行程传感器分别与齿轮传动机构和车桥转向油缸的配合设置,最后通过两个行程传感器与同一plc控制器的电性连接设置,使得与牵引车鞍座配合的牵引销的转动参数信息,可以通过齿轮传动机构和与齿轮传动机构相配合的行程传感器的协同作业,传递给plc控制器,再由plc控制器控制与车桥转向油缸相配合的行程传感器,控制车桥转向油缸的行程,最终实现行走单元(挂车车桥车胎)转动角度的控制,其在简化结构的同时,可以满足多个行走单元平稳、快速地转向的需求,后续可便捷地增加多个行走单元;同时,配合通过plc控制器的电动控制,极大地提升了转向的同步性和精准性;
13.2.本实用新型中的从动齿轮由与传动齿圈水平啮合的齿轮部、以及一体式垂直连接在齿轮部上方的轴体部组成,通过轴体部将齿轮部与传感器相连接,并将轴体部悬设于轴承内圈的内侧以与传动齿圈相啮合,连接安装稳定,极大地提升了齿轮传动机构对于牵引销转动角度反馈的精准性,同时进一步保证了鹅颈与行走单元转向的同步性和精准性;
14.3.本实用新型中的牵引销、牵引销固定座、回转轴承、回转轴承座、行程传感器ⅰ、从动齿轮和plc控制器均分别直接或间接安装在鹅颈框架上,行程传感器ⅱ安装在车桥转向油缸上,整体结构紧凑合理,且生产成本较低,适合于规模化推广应用。
附图说明
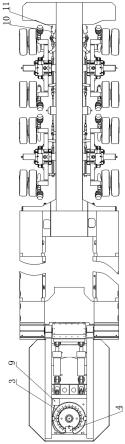
15.图1为本实用新型的工作原理示意图;
16.图2为本实用新型鹅颈的结构示意图;
17.图3为本实用新型鹅颈的剖视示意图(省去从动齿轮和齿轮传感器ⅰ);
18.图4为本实用新型回转轴承的结构示意图;
19.图5为本实用新型回转轴承的剖视示意图;
20.图6为本实用新型从动齿轮和行程传感器ⅰ的连接结构俯视图;
21.图7为本实用新型从动齿轮和行程传感器ⅰ的连接结构侧视图;
22.图中:1、牵引销,2、牵引销固定座,3、回转轴承,31、轴承内圈,32、传动齿圈,33、轴承外圈,34、钢球,35、防尘圈,4、行程传感器ⅰ,5、从动齿轮,51、齿轮部,52、轴体部,6、牵引销固定座,7、回转轴承座,8、鹅颈框架,9、plc控制器,10、车桥转向油缸,11、行程传感器ⅱ。
具体实施方式
23.以下实施例用来进一步说明本实用新型的内容,并不限制本实用新型的应用。
24.请参阅图1~图7所示,其示出一种挂车鹅颈电动转向结构,包括鹅颈、plc控制器9和行走单元(此处行走单元的数量不受限制,可任意增加),行走单元包括车桥转向油缸10
(现有行走单元上具备的悬臂,车桥体,车轮及驱动连杆等基础结构在此未作具体描述,但不应因此限制其功能实现),鹅颈包括牵引销1(牵引销1的旋转角度为-110~110度)、牵引销固定座2、回转轴承3、回转轴承座7和鹅颈框架8,牵引销1用于安装在牵引车的鞍座上,回转轴承3由轴承内圈31、轴承外圈33、以及设置于轴承内圈31与轴承外圈33之间的钢球34和防尘圈35,轴承内圈31的内壁侧具有传动齿圈32,牵引销1通过牵引销固定座2与轴承内圈31的下表面螺栓固定,轴承外圈33通过钢球34转动配合于轴承内圈31的外周,回转轴承座7螺栓固定在轴承外圈33的外周并焊接在鹅颈框架8上,plc控制器9同时也安装在鹅颈框架8上;
25.进一步的,传动齿圈32水平啮合有一从动齿轮5,从动齿轮5有与传动齿圈32相啮合的齿轮部51、以及与齿轮部51一体式垂直连接的轴体部52组成,轴体部52的另一端连接有行程传感器ⅰ4,车桥转向油缸10上安装有行程传感器ⅱ11,行程传感器ⅰ4和行程传感器ⅱ11同时与plc控制器9电性连接。
26.工作时,与牵引车鞍座联动配合的牵引销1旋转,带动轴承内圈31旋转,进而带动轴承内圈31内壁侧的传动齿圈32旋转,通过传动齿圈32与从动齿轮5的水平啮合,将牵引销1的转动角度参数传递给行程传感器ⅰ4,行程传感器ⅰ4再将其反馈给plc控制器9,继而由plc控制器9控制行程传感器ⅱ11,控制车桥转向油缸10的行程,最终实现行走单元(挂车车桥车胎)转动角度的控制,保证鹅颈与行走单元转向的同步性和精准性,从而进一步保证牵引车与挂车的行走单元转向的同步性和精准性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1