关节组件、腿组件及足式机器人的制作方法
1.本技术涉及机器人领域,尤其涉及一种关节组件、腿组件及足式机器人。
背景技术:
2.足式机器人的腿组件和躯干组件之间设有关节组件,用于驱动腿组件运动。关节组件处设有多个电机,用于驱动腿组件的不同部位运动。电机和电机之间相连,进而使得腿组件的不同部位能够组合运动。
3.现有技术中,电机和电机之间通过法兰连接。法兰上的螺栓设在端面,拆卸和安装多有不便。并且增设法兰使得关节组件重量增加,能耗加大。
技术实现要素:
4.本技术的目的在于提供一种关节组件、腿组件及足式机器人,有效解决上述问题。
5.本技术的一个方面提供一种关节组件,包括:第一电机和第二电机;所述第一电机包括输出端;所述第二电机包括壳体,所述壳体的外表面形成有连接部;所述输出端与所述连接部套设且固定连接。
6.进一步地,所述关节组件还包括锁定件,所述输出端与所述连接部通过所述锁定件固定连接。
7.进一步地,所述输出端设有沿径向延伸的第一锁定孔,所述连接部设有与所述第一锁定孔同轴的第二锁定孔,所述锁定件插置于所述第一锁定孔和所述第二锁定孔。
8.进一步地,所述连接部设置为环形围壁,套设于所述输出端的外侧,所述输出端为空心轴,第一锁定孔贯穿所述输出端的侧壁。
9.进一步地,所述第一锁定孔与所述第二锁定孔均设有多组,沿所述输出端的周向一一对应设置,所述锁定件设有多个,对应插置于各所述第一锁定孔和所述第二锁定孔。
10.进一步地,所述环形围壁的轴向延伸长度小于或等于所述第二电机沿轴向方向上延伸长度的四分之一;所述输出端伸出所述第一电机的长度小于或等于所述第一电机在轴向方向上延伸长度的四分之一;和/或
11.所述环形围壁和输出端的壁厚大于或等于40毫米。
12.进一步地,所述输出端与所述连接部中的一者设有锁定孔,另一者设有锁定件,所述锁定件沿所述输出端的径向伸缩设置,所述锁定件插装于所述锁定孔内,固定所述输出端与所述连接部。
13.进一步地,所述输出端和所述连接部中的一者设有导向凸台,另一者设有沿所述输出端的轴向延伸的导向凹槽,所述导向凸台与所述导向凹槽在所述输出端与所述连接部套设时配合。
14.本技术的另一个方面提供一种足式机器人的腿组件,包括:腿部和上述关节组件,所述关节组件设于所述腿部,用于与足式机器人躯干组件连接。
15.本技术的又一个方面提供一种足式机器人,包括:躯干组件和上述腿组件。
16.本技术,通过将关节组件中电机的连接方式由原先的法兰连接改进为输出端和连接部的套装,提升了连接处的结构强度,且方便安装和拆卸。同时,减轻了关节组件的重量。进而使得足式机器人运行时更稳定,能耗更小。
17.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
18.图1所示为本技术关节组件的一个实施例的立体示意图;
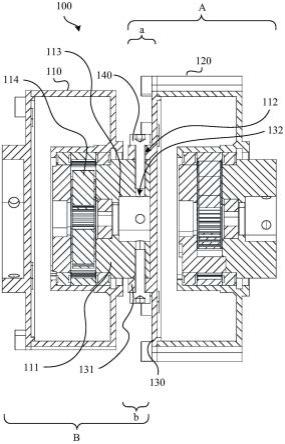
19.图2所示为图1所示的关节组件的剖面图;
20.图3所示为本技术足式机器人的一个实施例的立体示意图。
具体实施方式
21.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置的例子。
22.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。除非另作定义,本技术使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术说明书以及权利要求书中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。在本技术说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
23.本技术提供一种关节组件、腿组件及足式机器人。关节组件包括:第一电机和第二电机。第一电机包括输出端。第二电机包括壳体。壳体的外表面形成有连接部。输出端与连接部套设且固定连接。腿组件包括:腿部和上述关节组件,关节组件设于腿部,用于与足式机器人躯干组件连接。足式机器人包括:躯干组件和上述腿组件。本技术通过将关节组件中电机的连接方式由原先的法兰连接改进为输出端和连接部的套装,提升了连接处的结构强度,且方便安装和拆卸。同时,减轻了关节组件的重量。进而使得足式机器人运行时更稳定,能耗更小。
24.下面结合附图,对本技术的关节组件、腿组件及足式机器人进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
25.本技术提供一种关节组件100,参照图1和图2所示,包括:第一电机110和第二电机
120,用于控制足式机器人的腿组件进行运动。所述第一电机110包括输出端111。所述第二电机120包括壳体130,所述壳体130的外表面形成有连接部131。所述输出端111与所述连接部131套设且固定连接。具体地,输出端111和第一电机110内的减速机构114连接,用于传递扭矩。输出端111和连接部131固定连接,使得第一电机110运行时,带动第二电机120转动。输出端111和连接部131之间通过套设进行固定连接,安装拆卸时,只需将输出端111插入拔出连接部131或将连接部131插入拔出输出端111,操作简单便捷,效率高,可维护性好。输出端111和连接部131之间套设时,重叠部分增加了结构强度。连接部131相较于原先的法兰设计,径向方向厚度小,减轻了重量,降低成本。第二电机120的重量减轻,第一电机110在带动第二电机120转动时,能耗小。
26.在一些实施例中,继续参照图1和图2所示,所述关节组件100还包括锁定件140,所述输出端111与所述连接部131通过所述锁定件140固定连接。如此设置,使得输出端111和连接部131的固定连接更牢靠,也方便安装拆卸。在另一些实施例中,输出端111和连接部131之间的套设可通过过盈配合、胀紧套等方式实现固定连接,结构简单成本低。
27.进一步地,在一些实施例中,输出端111和连接部131之间采用锁定件140进行锁定时,所述输出端111设有沿径向延伸的第一锁定孔112,所述连接部131设有与所述第一锁定孔112同轴的第二锁定孔132,所述锁定件140插置于所述第一锁定孔112和所述第二锁定孔132。当输出端111和连接部131之间进行套设安装时,输出端111插入连接部131或连接部131插入输出端111后,第一锁定孔112和第二锁定孔132同轴对齐,锁定件140插置于两孔内,使得输出端111在向连接部131传递扭矩时,输出端111和连接部131之间能够保持相对固定,维持扭矩传递的稳定性。原技术方案将连接部131设计成法兰,安装时,先将法兰与第一电机110用紧固件连接,再将第二电机120和法兰装配连接,步骤繁琐。本技术连接或分开第一电机110和第二电机120时,直接从输出端111或连接部131外围锁定件140的设置处,将锁定件140插入或拔出第一锁定孔112和第二锁定孔132即可实现,十分便利。
28.具体地,在一些实施例中,所述连接部131设置为环形围壁133,易加工成本低,方便套装。环形围壁133套设于所述输出端111的外侧。所述输出端111为空心轴113,减轻重量,降低成本。第一锁定孔112贯穿所述输出端111的侧壁。第一锁定孔112设为贯穿孔,降低制造工艺难度,节约成本,并且锁定件140插置于锁定孔112内的长度不受锁定孔112的深度限制,可根据实际应用情况进行调整,适用性更广。
29.在一些实施例中,所述第一锁定孔112与所述第二锁定孔132均设有多组,沿所述输出端111的周向一一对应设置,所述锁定件140设有多个,对应插置于各所述第一锁定孔112和所述第二锁定孔132。通过设置多个第一锁定孔112、第二锁定孔132和锁定件140,能够分摊输出端111带动连接部131旋转时所需的剪切应力,增加连接结构处的强度。在另一些实施例中,第一锁定孔112和第二锁定孔132也可设置为一组,锁定件设置为一个,降低成本。本技术对第一锁定孔112和第二锁定孔132的具体组数、锁定件140的具体件数不作限制。
30.在一些实施例中,第一锁定孔112和第二锁定孔132可设置为螺纹孔,锁定件140设置为和螺纹孔配合的螺钉,螺钉旋入第一锁定孔112和第二锁定孔132后即可使得输出端111和连接部131固定连接,锁紧效果佳。在其他一些实施例中,锁定件140可设置为销,第一锁定孔112和第二锁定孔132设置为与销配合的圆柱孔、圆锥孔等配合孔,结构简单,成本
低,安装拆卸效率高。在再一些实施例中,锁定件140可设置为长销,长销的长度大于连接部131的外径,第一锁定孔112和第二锁定孔132设置为两组,于连接部131周圈呈180度角度对称分布。输出端111和连接部131套装时,将长销插置于两组锁定孔中即可,安装简单快捷。本技术对第一锁定孔112、第二锁定孔132和锁定件140的具体实施方式不作限制。
31.原法兰的设计一般采用螺钉作为紧固件,且为了满足螺钉处屈曲强度和疲劳强度的设计要求通常需设置六或八个螺钉。本技术的紧固件可采用销的方式,且紧固件的数量可大幅减少,极大地减少了重量,也降低了成本。
32.在一些实施例中,所述输出端111与所述连接部131中的一者设有锁定孔(未图示),另一者设有锁定件(未图示),所述锁定件沿所述输出端111的径向伸缩设置,所述锁定件插装于所述锁定孔内,固定所述输出端111与所述连接部131。如此设置,当输出端111与连接部131套装到位时,锁定件自动插入锁定孔,实现锁定,安装便利、效率高。并且,采用此种锁定件,可减小输出端111和连接部131在轴向方向上的延伸长度,从而减轻重量。锁定件可设置为和弹簧等弹性体连接的小钢珠,当锁定孔位移至小钢珠处时,小钢珠受弹性体的压力作用运动,插入锁定孔,从而固定输出端111与连接部131之间的连接。本技术对活动式锁定件和与该锁定件配合的锁定孔的具体实施方式不作任何限制。
33.在一些实施例中,所述输出端111和所述连接部131中的一者设有导向凸台,另一者设有沿所述输出端111的轴向延伸的导向凹槽,所述导向凸台与所述导向凹槽在所述输出端111与所述连接部131套设时配合。当输出端111和连接部131套设时,将导向凸台和导向凹槽对准后再进行套设,使得套设完成时,第一锁定孔112和第二锁定孔132能够同轴对齐,后再将锁定件140插置入第一锁定孔112和第二锁定孔132即可完成套设安装。如此设置,安装十分便利高效。
34.在一些实施例中,所述环形围壁133的轴向延伸长度a小于或等于所述第二电机120沿轴向方向上延伸长度a的四分之一;所述输出端111伸出所述第一电机110的长度b小于或等于所述第一电机110在轴向方向上延伸长度b的四分之一;和/或所述环形围壁133和输出端111的壁厚大于或等于40毫米。原先的法兰结构,螺纹孔需沿输出端的轴向延伸,而本技术的第一锁定孔112和第二锁定孔132沿径向延伸,减小了环形围壁133和输出端111在轴向方向上的延伸长度,使得第一电机110和第二电机120连接后的结构更加紧凑,提高了空间利用率。同时,原先的法兰设计要求输出端和法兰具有一定的厚度,才能满足螺纹孔布置要求,本技术则可减小环形围壁133和输出端111的壁厚,只需满足强度要求即可,减轻了连接处的重量。
35.本技术还提供一种足式机器人的腿组件200,参照图3所示,包括:腿部210和上述关节组件100,所述关节组件100设于所述腿部210,用于与足式机器人躯干组件连接。腿部210包括第一腿部211和第二腿部212。第一腿部211在延伸方向上设有第一端213和第二端214。第二腿部212的一端和第一腿部211的第一端213可转动连接,第二腿部212的另一端为自由端。关节组件100设于第一腿部211的第二端214。关节组件100的第二电机120和第二腿部212通过连杆机构215连接。第二电机120运行,带动第二腿部212绕第一端213转动。关节组件100的第一电机110和第二电机120通过套设的连接方式连接,第一电机110运行,带动第二电机120和腿部210绕第二端214转动。通过本技术对第一电机110和第二电机120之间连接方式的改进,提高了结构强度,确保腿部210平稳运行,减轻了重量,降低了电机的能量
损耗。
36.本技术还提供一种足式机器人300,参照图3所示,包括:躯干组件310和上述的腿组件200。足式机器人300一般包括多个腿组件200用于支撑躯干组件310,本技术中足式机器人300包括四个腿组件,支撑更稳定。采用本技术中电机的连接方式,使得足式机器人300在行走过程中遇到较大障碍时能够输出更大的有效扭矩克服障碍。
37.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1