一种仿生机器人行走机构的制作方法
本技术涉及仿生机器人,具体地讲,涉及一种仿生机器人行走机构。
背景技术:
1、随着人类社会科学技术的不断发展,人类在机器人的应用上也越来越广泛,机器人不仅在工厂制造业发挥着巨大的作用,在我们的日常生活中也经常会见到它们的身影,现有的一些机器人上设置有行走机构,可模拟生物行走,但是这类行走的结构较为复杂,制作成本较高,不方便加工制作,不适宜推广使用。申请号为cn202121457948.1的专利公开了一种仿生机器人行走机构,包括承载此装置的基座,所述基座的下表面开设有活动槽,所述活动槽的内部活动卡接有活动转杆,所述活动转杆的底端固定连接有万向轮,所述基座的正面与背面均设置有行走机构,所述基座左侧内壁的中部固定连接有支撑板。该专利通过模拟蜘蛛的行走实现了整体装置的运动,通过齿轮、齿条和连杆以及链条的联动实现,比较复杂,因此设计了一种简单的通过模拟青蛙的跳跃运动的仿生行走机构。
技术实现思路
1、本实用新型要解决的技术问题是提供一种仿生机器人行走机构,模拟青蛙的运动进行仿生行走功能的实现。
2、本实用新型采用如下技术方案实现实用新型目的:
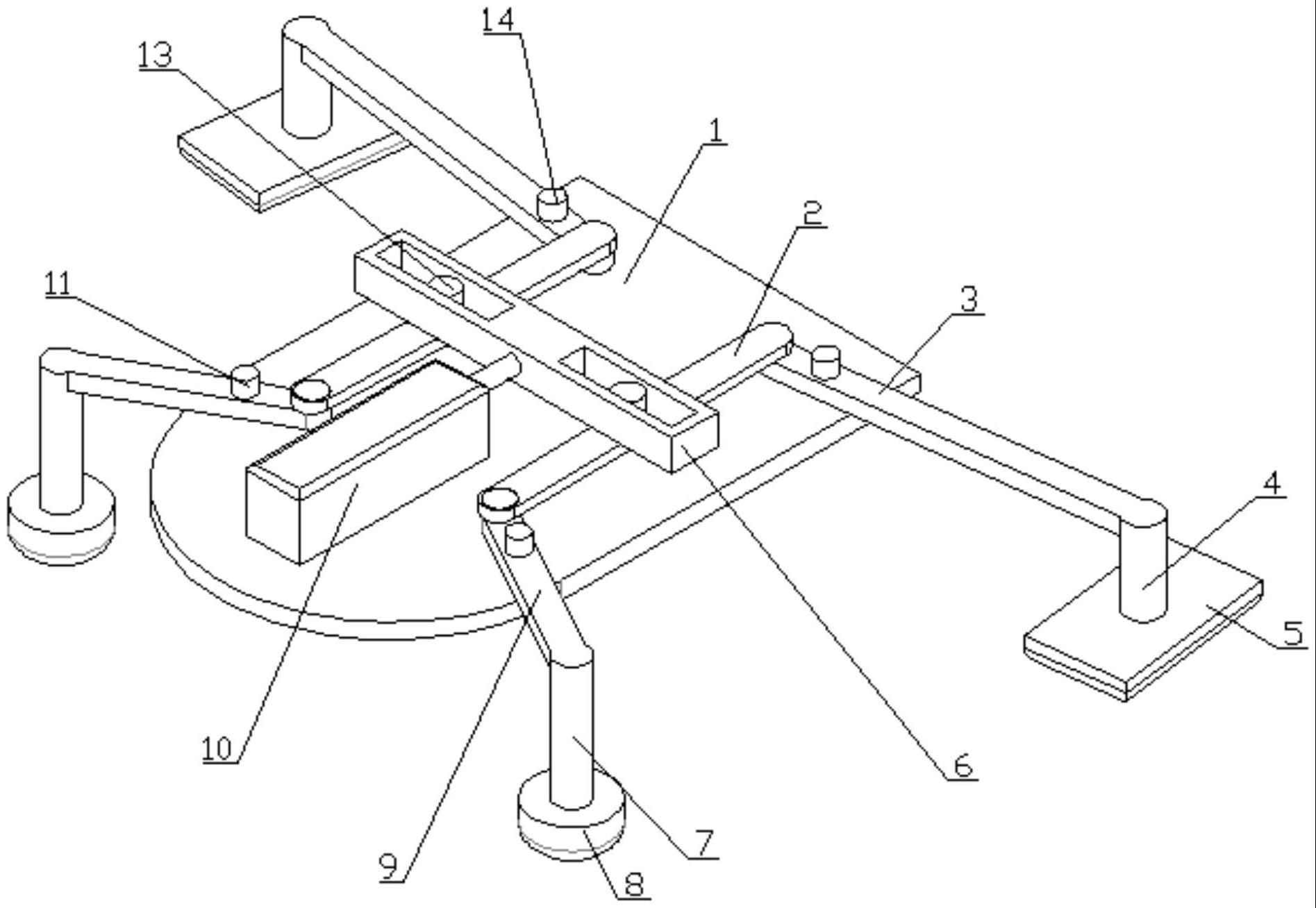
3、一种仿生机器人行走机构,包括主体,其特征是:所述主体的上部一端固定对称的支撑柱一,所述主体的上部另一端固定对称的支撑柱二,每个所述支撑柱一分别铰接摆动臂一,每个所述摆动臂一的外端分别固定支撑腿一,每个所述支撑腿一的下侧分别固定支撑脚一的中心;
4、每个所述支撑柱二分别铰接摆动臂二,每个所述摆动臂二的外端分别固定支撑腿二,每个所述支撑腿二的下端分别固定支撑脚二的中心。
5、作为本技术方案的进一步限定,同一侧的所述摆动臂一的另一端和摆动臂二的另一端分别铰接横梁的两端。
6、作为本技术方案的进一步限定,每个所述横梁的上侧中部分别固定连接限位轴,每个所述限位轴分别设置在滑槽内,两个所述滑槽分别设置在动力杆的两端。
7、作为本技术方案的进一步限定,所述动力杆的中心固定电动推杆的伸缩杆,所述电动推杆的外壳固定在所述主体上。
8、作为本技术方案的进一步限定,所述摆动臂一比所述摆动臂二短。
9、作为本技术方案的进一步限定,所述支撑腿一比所述支撑腿二高,所述支撑脚一为底部圆弧形的圆块,所述支撑脚二为方形板。
10、与现有技术相比,本实用新型的优点和积极效果是:本实用新型提供了一种一种仿生机器人行走机构。具备以下有益效果:
11、控制电动推杆的伸缩杆往复伸缩带动动力杆往复移动,通过动力杆、横梁、限位轴和摆动臂一与摆动臂二的联动,实现支撑脚一和支撑脚二的运动,最终实现支撑脚一和支撑脚二的前后运动实现跳跃功能;
12、本装置放在地上时,支撑脚一和支撑脚二接触地面,支撑脚一为头部下方,尾部低头部高的设计,实现支撑脚一和支撑脚二在移动时模拟青蛙的跳跃,实现移动。
技术特征:
1.一种仿生机器人行走机构,包括主体(1),其特征是:所述主体(1)的上部一端固定对称的支撑柱一(11),所述主体(1)的上部另一端固定对称的支撑柱二(14),每个所述支撑柱一(11)分别铰接摆动臂一(9),每个所述摆动臂一(9)的外端分别固定支撑腿一(7),每个所述支撑腿一(7)的下侧分别固定支撑脚一(8)的中心;
2.根据权利要求1所述的一种仿生机器人行走机构,其特征是:同一侧的所述摆动臂一(9)的另一端和摆动臂二(3)的另一端分别铰接横梁(2)的两端。
3.根据权利要求2所述的一种仿生机器人行走机构,其特征是:每个所述横梁(2)的上侧中部分别固定连接限位轴(13),每个所述限位轴(13)分别设置在滑槽(15)内,两个所述滑槽(15)分别设置在动力杆(6)的两端。
4.根据权利要求3所述的一种仿生机器人行走机构,其特征是:所述动力杆(6)的中心固定电动推杆(10)的伸缩杆,所述电动推杆(10)的外壳固定在所述主体(1)上。
5.根据权利要求3所述的一种仿生机器人行走机构,其特征是:所述摆动臂一(9)比所述摆动臂二(3)短。
6.根据权利要求1所述的一种仿生机器人行走机构,其特征是:所述支撑腿一(7)比所述支撑腿二(4)高,所述支撑脚一(8)为底部圆弧形的圆块,所述支撑脚二(5)为方形板。
技术总结
本技术公开了一种仿生机器人行走机构,包括主体,其特征是:所述主体的上部一端固定对称的支撑柱一,所述主体的上部另一端固定对称的支撑柱二,每个所述支撑柱一分别铰接摆动臂一,每个所述摆动臂一的外端分别固定支撑腿一,每个所述支撑腿一的下侧分别固定支撑脚一的中心,每个所述支撑柱二分别铰接摆动臂二,每个所述摆动臂二的外端分别固定支撑腿二,每个所述支撑腿二的下端分别固定支撑脚二的中心。本技术涉及仿生机器人技术领域,具体地讲,涉及一种仿生机器人行走机构,本装置能够模拟青蛙的运动进行仿生行走功能的实现。
技术研发人员:刘晓秋,李晴,刘美华
受保护的技术使用者:青岛新起点文化科技有限公司
技术研发日:20221014
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!