具有越障功能的机器人
本技术涉及移动机器人,具体地说是一种具有越障功能的机器人。
背景技术:
1、随着机器人技术的不断改革与创新,特别是近几年机器人领域的飞速发展,机器人工作环境也有着及其的特殊性。因此,对移动机器人的特殊要求越来越高,需要适应某特殊地形和环境,如。这就要求设计出特殊越障机构,用以满足特殊工作的需求。
技术实现思路
1、为了满足移动机器人能够适应特殊地形和环境的要求,提高移动机器人的适应性,本实用新型的目的在于提供一种具有越障功能的机器人。该具有越障功能的机器人上可搭载多种载荷,实现特殊地形和环境的越障功能。
2、本实用新型的目的是通过以下技术方案来实现的:
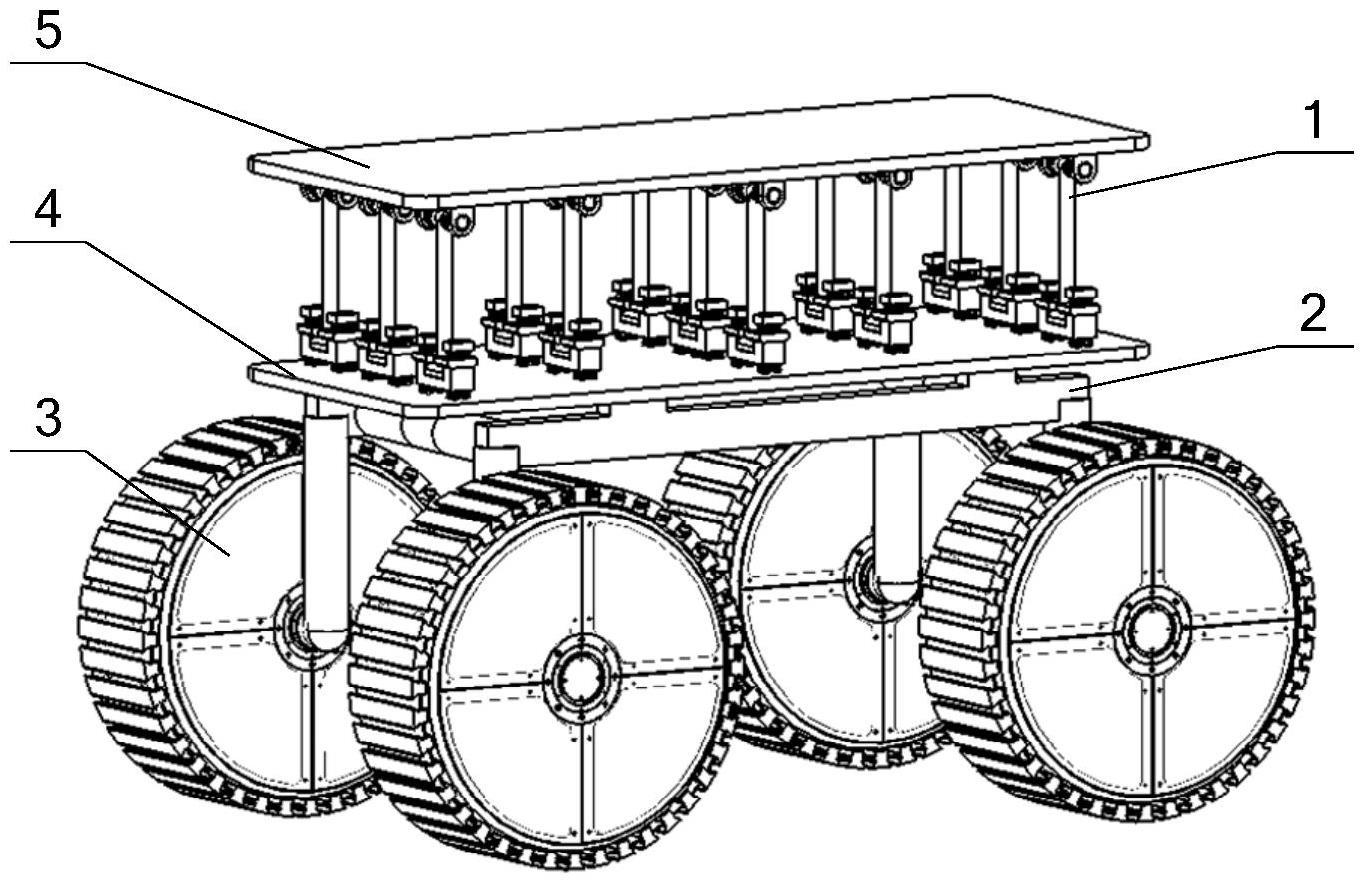
3、本实用新型包括越障机构、车架及可变形轮履耦合驱动机构,其中越障机构固定在车架的上方,所述车架上安装有多个作为驱动轮的可变形轮履耦合驱动机构,各所述可变形轮履耦合驱动机构位于越障机构的下方;所述越障机构包括下底板、上底板、锁紧装置及摆杆装置,所述下底板固接于车架上,所述下底板的上表面设有多个锁紧装置,所述上底板位于下底板的上方,所述上底板的下表面设有与锁紧装置数量相同、一一对应的摆杆装置,所述摆杆装置的下端锁紧于对应的锁紧装置中,所述摆杆装置的下端在行进中遇到障碍物时在障碍物的外力作用下绕摆杆装置的上端转动,并在越障后复位。
4、其中:所述锁紧装置包括锁紧端盖、锁紧下槽、锁紧上板、锁紧弹簧及滑动轴,所述滑动轴的下端固定在下底板上,上端设有所述锁紧端盖,所述锁紧下槽及锁紧上板均位于锁紧端盖与下底板之间,所述锁紧下槽上开设有用于容置摆杆装置下端的凹槽,所述凹槽开口端的锁紧下槽上设有用于将摆杆装置下端锁紧在凹槽中的锁紧上板,所述滑动轴分别由锁紧下槽及锁紧上板穿过,所述锁紧下槽及锁紧上板具有沿竖直方向的运动量。
5、所述锁紧下槽及锁紧上板均与滑动轴滑动连接,所述锁紧上板与锁紧端盖之间的滑动轴上及锁紧下槽与下底板之间的滑动轴上均套设有锁紧弹簧,所述锁紧下槽及锁紧上板通过锁紧弹簧的弹力实现沿竖直方向的运动量。
6、所述凹槽开口端两侧的锁紧下槽上均设有锁紧上板,每个所述锁紧上板的上方均设有锁紧端盖,每个所述锁紧端盖均通过滑动轴安装于下底板上;每个所述锁紧上板的前后两侧均设有斜面a。
7、所述凹槽的宽度与锁紧下槽的宽度相同,即所述凹槽沿宽度方向贯穿锁紧下槽。
8、所述摆杆装置包括支撑摆杆、摆杆轴、摆杆锁销、摆杆底座及摆杆扭簧,作为所述摆杆装置上端的摆杆底座固接于上底板的下表面,所述支撑摆杆的上端为转动安装于摆杆底座上的摆杆轴,所述支撑摆杆的下端为被锁紧在锁紧装置中的摆杆锁销,所述摆杆锁销即为摆杆装置的下端;所述摆杆轴上套设有摆杆扭簧,所述摆杆扭簧的一端连接于支撑摆杆上、另一端固定在所述摆杆底座上开设的摆杆调节孔中。
9、所述支撑摆杆两侧的摆杆轴上分别套设有摆杆扭簧,所述摆杆底座的两侧均开设有摆杆调节孔。
10、所述摆杆底座上沿摆杆轴的圆周方向开设有多个摆杆调节孔,所述摆杆扭簧的另一端通过固定在不同摆杆调节孔中实现对支撑摆杆的弹簧扭力调节,所述支撑摆杆在摆杆扭簧的弹簧扭力作用下处于竖直状态,进而实现所述摆杆锁销被锁紧在锁紧装置中。
11、所述摆杆锁销绕摆杆轴的运动轨迹为弧线,所述摆杆锁销的前后两侧均设有斜面b。
12、本实用新型的优点与积极效果为:
13、1.本实用新型的越障机构通过多个锁紧装置和摆杆装置的配合工作,能够使得机器人穿过特殊障碍物,提高了机器人的越障性能。
14、2.本实用新型的越障机构穿过障碍物为被动方式,无电机驱动,采用弹簧复位的方式实现,精简了控制方式,操作简单。
15、3.本实用新型机器人移动平台可跨越多种障碍物,提高通过性能,适应性强,模块化、精简化,易于安装、操控简单。
16、4.本实用新型将可变形轮履耦合驱动机构作为驱动轮,提高了一般性轮式驱动的越障能力,使得整个机器人的适应能力更加的强大。
技术特征:
1.一种具有越障功能的机器人,其特征在于:包括越障机构(1)、车架(2)及可变形轮履耦合驱动机构(3),其中越障机构(1)固定在车架(2)的上方,所述车架(2)上安装有多个作为驱动轮的可变形轮履耦合驱动机构(3),各所述可变形轮履耦合驱动机构(3)位于越障机构(1)的下方;所述越障机构(1)包括下底板(4)、上底板(5)、锁紧装置(6)及摆杆装置(7),所述下底板(4)固接于车架(2)上,所述下底板(4)的上表面设有多个锁紧装置(6),所述上底板(5)位于下底板(4)的上方,所述上底板(5)的下表面设有与锁紧装置(6)数量相同、一一对应的摆杆装置(7),所述摆杆装置(7)的下端锁紧于对应的锁紧装置(6)中,所述摆杆装置(7)的下端在行进中遇到障碍物(19)时在障碍物(19)的外力作用下绕摆杆装置(7)的上端转动,并在越障后复位。
2.根据权利要求1所述具有越障功能的机器人,其特征在于:所述锁紧装置(6)包括锁紧端盖(8)、锁紧下槽(9)、锁紧上板(10)、锁紧弹簧(11)及滑动轴(12),所述滑动轴(12)的下端固定在下底板(4)上,上端设有所述锁紧端盖(8),所述锁紧下槽(9)及锁紧上板(10)均位于锁紧端盖(8)与下底板(4)之间,所述锁紧下槽(9)上开设有用于容置摆杆装置(7)下端的凹槽,所述凹槽开口端的锁紧下槽(9)上设有用于将摆杆装置(7)下端锁紧在凹槽中的锁紧上板(10),所述滑动轴(12)分别由锁紧下槽(9)及锁紧上板(10)穿过,所述锁紧下槽(9)及锁紧上板(10)具有沿竖直方向的运动量。
3.根据权利要求2所述具有越障功能的机器人,其特征在于:所述锁紧下槽(9)及锁紧上板(10)均与滑动轴(12)滑动连接,所述锁紧上板(10)与锁紧端盖(8)之间的滑动轴(12)上及锁紧下槽(9)与下底板(4)之间的滑动轴(12)上均套设有锁紧弹簧(11),所述锁紧下槽(9)及锁紧上板(10)通过锁紧弹簧(11)的弹力实现沿竖直方向的运动量。
4.根据权利要求2所述具有越障功能的机器人,其特征在于:所述凹槽开口端两侧的锁紧下槽(9)上均设有锁紧上板(10),每个所述锁紧上板(10)的上方均设有锁紧端盖(8),每个所述锁紧端盖(8)均通过滑动轴(12)安装于下底板(4)上;每个所述锁紧上板(10)的前后两侧均设有斜面a(20)。
5.根据权利要求2所述具有越障功能的机器人,其特征在于:所述凹槽的宽度与锁紧下槽(9)的宽度相同,即所述凹槽沿宽度方向贯穿锁紧下槽(9)。
6.根据权利要求1所述具有越障功能的机器人,其特征在于:所述摆杆装置(7)包括支撑摆杆(13)、摆杆轴(14)、摆杆锁销(15)、摆杆底座(16)及摆杆扭簧(17),作为所述摆杆装置(7)上端的摆杆底座(16)固接于上底板(5)的下表面,所述支撑摆杆(13)的上端为转动安装于摆杆底座(16)上的摆杆轴(14),所述支撑摆杆(13)的下端为被锁紧在锁紧装置(6)中的摆杆锁销(15),所述摆杆锁销(15)即为摆杆装置(7)的下端;所述摆杆轴(14)上套设有摆杆扭簧(17),所述摆杆扭簧(17)的一端连接于支撑摆杆(13)上、另一端固定在所述摆杆底座(16)上开设的摆杆调节孔(18)中。
7.根据权利要求6所述具有越障功能的机器人,其特征在于:所述支撑摆杆(13)两侧的摆杆轴(14)上分别套设有摆杆扭簧(17),所述摆杆底座(16)的两侧均开设有摆杆调节孔(18)。
8.根据权利要求6所述具有越障功能的机器人,其特征在于:所述摆杆底座(16)上沿摆杆轴(14)的圆周方向开设有多个摆杆调节孔(18),所述摆杆扭簧(17)的另一端通过固定在不同摆杆调节孔(18)中实现对支撑摆杆(13)的弹簧扭力调节,所述支撑摆杆(13)在摆杆扭簧(17)的弹簧扭力作用下处于竖直状态,进而实现所述摆杆锁销(15)被锁紧在锁紧装置(6)中。
9.根据权利要求6所述具有越障功能的机器人,其特征在于:所述摆杆锁销(15)绕摆杆轴(14)的运动轨迹为弧线,所述摆杆锁销(15)的前后两侧均设有斜面b(21)。
技术总结
本技术涉及移动机器人,具体地说是一种具有越障功能的机器人,包括越障机构、车架及可变形轮履耦合驱动机构,其中四个可变形轮履耦合驱动机构作为驱动轮安装在车架上,车架上方安装有越障机构,越障机构包括锁紧装置、摆杆装置、下底板及上底板,多个锁紧装置固定在下底板上,与多个摆杆装置锁紧在一起,多个摆杆装置共同安装在上底板上。一方面通过越障机构中锁紧装置的释放和回收跨越特殊障碍物,另一方面通过四个可变形轮履耦合驱动机构的作用也可跨越一般障碍物,为提高机器人的移动效率及特殊环境下能够正常工作提供了技术支撑。本技术具有机构精巧、模块化、适应性强,易于安装、更换、操控精准的特点。
技术研发人员:李斌,郑怀兵,王聪,梁志达,刘春,刘启宇,刘铜,韩世凯
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!