基于麦克纳姆轮的全向智能移动货运机器人
本发明属于机器人领域,涉及货运机器人技术,具体涉及一种基于麦克纳姆轮的全向智能移动货运机器人。
背景技术:
1、现有的工程货运机器人功能较为单一,只能单独实现抓取、运输、拖拽等单一操作,并且其存在灵活性差、运动方向限制多、无法在狭小的空间内完成搬运、运输路径长等诸多缺陷。
2、所以,需要一个新的技术方案来解决这个问题。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,提供一种基于麦克纳姆轮的全向智能移动货运机器人,其针对工程货运机器人功能单一的不足,设计一种集物体夹取、暂存及运输等功能的多用途全向智能移动货运机器人,适合工厂内、办公区域内以及平坦路况下的作业环境,对轻工业的自动化改造具有一定的商用价值。
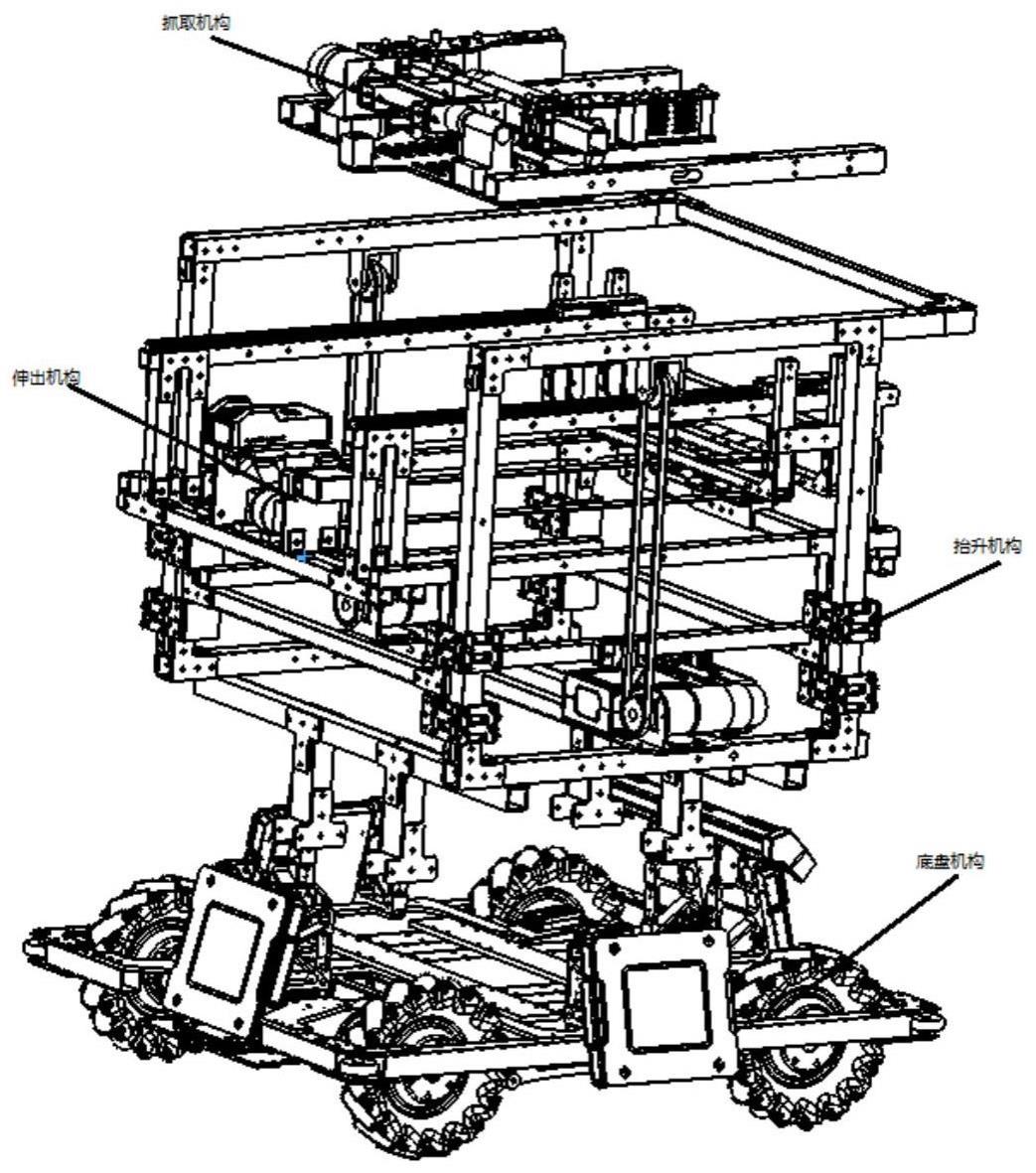
2、技术方案:为实现上述目的,本发明提供一种基于麦克纳姆轮的全向智能移动货运机器人,包括底盘机构、抬升机构、伸出机构和抓取机构;
3、所述底盘机构包括底盘结构框架和设置于底盘结构框架上的四个轮组机构,所述轮组机构包括第一无刷电机、联轴器、麦克纳姆轮、轮组悬架,所述第一无刷电机镶套在轮组悬架内,所述第一无刷电机的尾端与联轴器相连,首端与麦克纳姆轮相连,所述轮组悬架通过塞打螺栓与底盘结构框架相连;
4、所述抬升机构包括抬升结构固定框架和抬升结构运动框架,所述抬升结构固定框架的两端均设置有第二无刷电机、链条和链轮,所述第二无刷电机的电机轴连接链轮,带动竖直放置的链条滑动,所述抬升结构运动框架的四端均设置有第一滑块,所述第一滑块套设在抬升结构固定框架上,所述抬升结构运动框架通过链条同步固定件连接着链条;
5、所述伸出机构包括伸出结构固定框架和伸出结构运动框架,所述伸出结构固定框架固定于抬升结构运动框架上,所述伸出结构固定框架的内端和外端上分别设置有第三无刷电机和同步带轮,所述第三无刷电机和同步带轮之间设置有同步带,所述伸出结构运动框架通过同步带齿板连接着同步带,所述伸出结构固定框架上的两端均设置有直线滑轨,所述伸出结构运动框架的两端通过第二滑块分别配合在两个直线滑轨上;
6、所述抓取机构包括爪臂部分、翻转部分和夹取部分,所述爪臂部分安装固定于伸出结构运动框架上,所述翻转部分包括第四无刷电机和轴承座,所述轴承座连接在第四无刷电机上,所述夹取部分包括气缸和两个夹臂,两个夹臂配合在轴承座两端,所述气缸设置于两个夹臂之间。
7、进一步地,所述底盘结构框架的底部对称设置有两个导轮,导轮作为最大承载衡量标准,车身过重时,底盘结构框架下沉,导轮接触地面,避免车身与地面摩擦。
8、进一步地,所述第一无刷电机上分别设置有电机尾端碳板和电机安装碳板。电机尾端碳板之间连有限位碳管,起到限位和支撑作用。
9、进一步地,所述第一滑块包括轴承滑块侧板、滑块连接件、轴承、铜套、和轴承滑块前后板。
10、进一步地,所述伸出结构固定框架上设置有舵机和摄像头。
11、进一步地,所述同步带与两个直线滑轨平行设置。
12、进一步地,所述第二滑块上设置有连接块,所述爪臂部分通过连接块安装于两个第二滑块上。
13、进一步地,所述爪臂部分上设置有翻转限位块,所述翻转限位块用于对翻转部分进行限位。
14、进一步地,所述轴承座贯穿两个夹臂。
15、本发明通过底盘机构、抬升机构、伸出机构和抓取机构四个部分共同作用实现货物运输功能,具备操作简单,适用性强,功耗低等诸多优势,能够在狭小空间内完成物体的高效搬运,具有多功能集成化,自主规划分析,网络控制等优点,满足不同场景下的不同功能,并具有相当好的拓展性及可维护性,推广前景大,随制造业自动化发展,该机器人有着更广的应用与可观的商业价值。
16、有益效果:本发明与现有技术相比,具备如下优点:
17、1、其具备结构简单,易于维修,场景实用性强等优点,且能同时具有抓取、暂存以及运输的功能,提高了货运机器人的利用率,同时还能够实现原地旋转的动作,使得货运机器人的运输路径的占地面积减少,从而提高了土地利用率。
18、2、能够实现全向运动,且灵活度更高,能够在狭小的空间内完成物体的高效搬运,丰富了货运机器人功能性,提高了搬运效率。
19、3、在夹取物体的时候不会产生静电火花,且可调节夹取力度,所以可将其用于危险作业以及危险行业的搬运工作,提升了货运机器人的功能性。
技术特征:
1.基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,包括底盘机构、抬升机构、伸出机构和抓取机构;
2.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述底盘结构框架的底部对称设置有两个导轮。
3.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述第一无刷电机上分别设置有电机尾端碳板和电机安装碳板。
4.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述第一滑块包括轴承滑块侧板、滑块连接件、轴承、铜套、和轴承滑块前后板。
5.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述伸出结构固定框架上设置有舵机和摄像头。
6.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述同步带与两个直线滑轨平行设置。
7.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述第二滑块上设置有连接块,所述爪臂部分通过连接块安装于两个第二滑块上。
8.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述爪臂部分上设置有翻转限位块,所述翻转限位块用于对翻转部分进行限位。
9.根据权利要求1所述的基于麦克纳姆轮的全向智能移动货运机器人,其特征在于,所述轴承座贯穿两个夹臂。
技术总结
本发明公开了一种基于麦克纳姆轮的全向智能移动货运机器人,包括底盘机构、抬升机构、伸出机构和抓取机构;所述底盘机构包括底盘结构框架和设置于底盘结构框架上的四个轮组机构;所述抬升机构包括抬升结构固定框架和抬升结构运动框架;所述伸出机构包括伸出结构固定框架和伸出结构运动框架;所述抓取机构包括爪臂部分、翻转部分和夹取部分。本发明通过底盘机构、抬升机构、伸出机构和抓取机构四个部分共同作用实现货物运输功能,具备操作简单,适用性强,功耗低等诸多优势,能够在狭小空间内完成物体的高效搬运,具有多功能集成化,自主规划分析,网络控制等优点,满足不同场景下的不同功能,并具有相当好的拓展性及可维护性。
技术研发人员:田孝京,刘赞,周炜,康超,吴蔓青,姚美珍,谢政谕,王子航
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!