一种轮腿可变式越障机器人
本发明属于机器人,具体为一种轮腿可变式越障机器人。
背景技术:
1、面对频繁发生的自然灾害,灾后的物资运输和救援工作,以及航空航天这一系列未知环境中的探索工作之时,为了确保人员的安全与工作任务的运作,需要采用移动机器人的参与。在面对非结构化路面之时,轮式机器人具有一定的局限性,即它的越障能力弱,而腿式机器人在越障方面表现出了优越的性能。因此,设计一种轮腿可变式越障机器人,使得机器人既能在平面上保持较好的机动性,又能在遇到崎岖路面时有较好的越障能力。变形率为变形后的轮腿半径与变形前的比值。判断轮腿可变式越障机器人的越障能力最主要的依据的就是轮腿的变形率。
2、轮腿机器人的越障原理在于将于平面运动的连续轨迹,转化成了在非结构地形下的点轨迹,以达到越障的目的。而实现点轨迹有两种方法,一种是通过机器人的腿,在强控制条件下(即使用多个视觉传感器,计算可行的落点),完全通过关节腿寻找落点来达到越障的目的,这种方法有两个缺点:一是对控制的要求很高,二是行动的效率低。另一种是保留传统车轮的运动方式将车轮的连续轨迹改变成非连续轨迹,即使用变形轮,这种方法运动效率高,缺点是越障高度全取决于变形率,变形率越小越障能力就越小。因此,本发明提出一种新型的基于滑块连杆机构的轮腿可变式机器人,通过齿轮实现车轮变形,并且能够达到较大的变形率,使得机器人控制简单,且能够在平面上保持高速运动和非结构化的路面有较好的越障能力。
3、中国发明专利:一种左右接触区域主动可变的轮腿复合式车轮(申请号:cn115556846a)中,提出了一种左右接触区域主动可变的轮腿复合式车轮,包括固定架、轴杆、槽轮、多个脚杆和多个调节组件,固定架的中心形成有轴孔;轴杆设置在轴孔内;轴杆包括从轴孔的两端分别伸出的第一端部和第二端部;槽轮固定在第一端部上,槽轮的边缘位置设有多个容纳凹槽;脚杆与固定架铰接;调节组件设于固定架上;调节组件一端与脚杆铰接,另一端与第二端部传动连接;当轴杆带动槽轮远离固定架移动时,调节组件带动脚杆收拢至容纳凹槽内,用于进行轮式移动;当轴杆带动槽轮朝向固定架移动时,调节组件带动脚杆展开,以脱离容纳凹槽,用于进行腿式移动。但该专利的轮腿结构变形率较低,综上,本发明要提供一种轮腿结构变形率高,且方便控制的轮腿可变式越障机器人。
技术实现思路
1、本发明目的在于提供一种轮腿可变式越障机器人,以解决现有技术的轮腿机器人控制难度高,轮腿变形率低的技术问题。
2、为解决上述技术问题,本发明所述的一种轮腿可变式越障机器人,其包括:
3、机架,包括机架本体;
4、变形机构,包括变形电机,由机架本体支撑的轴对称设置的一对变形轮盘,和由变形电机驱动的轴对称设置的一对可变形轮腿机构;可变形轮腿机构包括数个变形爪,变形爪铰接于变形轮盘外侧,同一可变形轮腿机构的变形爪可在变形电机的驱动下收缩并环绕共同组成轮状形状;变形爪可在变形电机的驱动下向变形轮盘外周侧伸展形成腿状结构;
5、传动机构,其由机架本体支撑,传动机构用于驱动两个可变形轮腿机构转动,以使轮腿可变式越障机器人整体移动。
6、作为本发明的一种优选,所述变形爪包括齿轮连杆、连杆a、滑块、连杆b和圆弧腿;为了方便叙述,变形爪伸展为腿状结构时,其部件靠近轮盘一端称为始端,远离轮盘一端称为尾端,齿轮连杆始端与变形轮盘铰接,且由变形电机驱动转动,齿轮连杆中部设置有滑槽,滑块滑动设置于滑槽中;连杆a始端与变形轮盘铰接,且连杆a与变形轮盘的铰接点和齿轮连杆与变形轮盘的铰接点无相对运动,连杆a尾端与滑块始端铰接;连杆b始端与滑块尾端铰接,连杆b尾端与圆弧腿始端铰接;圆弧腿始端同时与齿轮连杆尾端铰接,且圆弧腿上两个铰接点不同,连杆b与圆弧腿的铰接起到了限制圆弧腿转动的作用。
7、作为本发明的一种优选,轮盘外侧铰接有中心齿轮,变形电机通过空心轴驱动中心齿轮转动,齿轮连杆始端铰接有变形齿轮,变形齿轮与中心齿轮啮合。变形电机通过穿过的变形轮盘的空心轴,将动力传输给中心齿轮,中心齿轮驱动齿轮连杆转动,滑块在连杆a的约束下沿着齿轮连杆上的滑槽向外推出,滑块向外推出后,在齿轮连杆的约束下,滑块、连杆b、圆弧腿三者成为了一个滑块曲柄机构,完成了整个可变形轮腿机构的变形过程。其中滑块的滑槽充当了滑块曲柄的限位机构,避免曲柄越过极限位置的不确定运动。
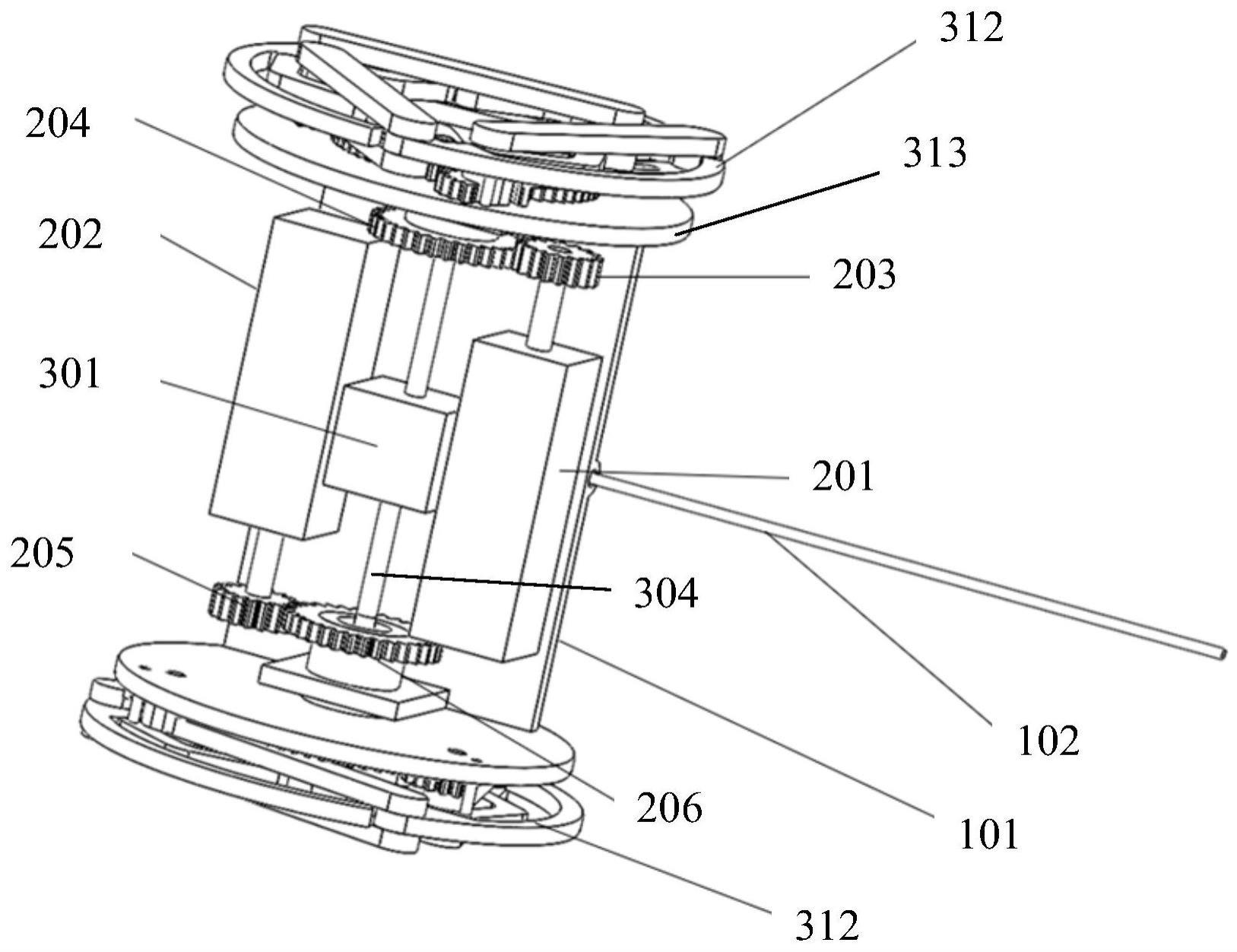
8、作为本发明的一种优选,传动机构包括对称设置的电机a和电机b、第一齿轮a、第二齿轮a、第一齿轮b、第二齿轮b;电机a驱动第一齿轮a转动,第二齿轮a与第一齿轮a啮合,第二齿轮a驱动一侧变形轮盘转动,进而带动该侧可变形轮腿机构转动;电机b驱动第一齿轮b转动,第二齿轮b与第一齿轮b啮合,第二齿轮b驱动另一侧变形轮盘转动,进而带动该侧可变形轮腿机构转动,两侧可变形轮腿机构同时转动使轮腿可变式越障机器人移动,通过电机a和电机b的差速转动,可实现轮腿可变式越障机器人的转向。
9、作为本发明的一种优选,机架本体中部设置有尾杆,尾杆可与地面接触,以保持轮腿可变式越障机器人的平衡。
10、本发明所述的一种轮腿可变式越障机器人,具有如下优点:
11、1.本发明综合利用曲柄和滑块的复合机构原理实现了较大变形率的可变形轮腿机构,有效的利用了圆弧腿的长度作为腿的直径,增加了可变形轮腿机构的变形率;
12、2.本发明提出一种全新的单变形率的可变形轮腿机构,能够相对简单的控制可变形轮腿机构的变形,并且变形模块独立于行动模块,可以做到机器人移动的时候同时变形。
技术特征:
1.一种轮腿可变式越障机器人,其特征在于,其包括:
2.如权利要求1所述的一种轮腿可变式越障机器人,其特征在于,所述变形爪包括齿轮连杆、连杆a、滑块、连杆b和圆弧腿;齿轮连杆始端与变形轮盘铰接,且由变形电机驱动转动,齿轮连杆中部设置有滑槽,滑块滑动设置于滑槽中;连杆a始端与变形轮盘铰接,且连杆a与变形轮盘的铰接点和齿轮连杆与变形轮盘的铰接点无相对运动,连杆a尾端与滑块始端铰接;连杆b始端与滑块尾端铰接,连杆b尾端与圆弧腿始端铰接;圆弧腿始端同时与齿轮连杆尾端铰接,且圆弧腿上两个铰接点不同。
3.如权利要求1所述的一种轮腿可变式越障机器人,其特征在于,轮盘外侧铰接有中心齿轮,变形电机通过空心轴驱动中心齿轮转动,齿轮连杆始端铰接有变形齿轮,变形齿轮与中心齿轮啮合。
4.如权利要求1所述的一种轮腿可变式越障机器人,其特征在于,传动机构包括对称设置的电机a和电机b、第一齿轮a、第二齿轮a、第一齿轮b、第二齿轮b;电机a驱动第一齿轮a转动,第二齿轮a与第一齿轮a啮合,第二齿轮a驱动一侧变形轮盘转动,进而带动该侧可变形轮腿机构转动;电机b驱动第一齿轮b转动,第二齿轮b与第一齿轮b啮合,第二齿轮b驱动另一侧变形轮盘转动,进而带动该侧可变形轮腿机构转动。
5.如权利要求1所述的一种轮腿可变式越障机器人,其特征在于,机架本体中部设置有用于保持轮腿可变式越障机器人平衡的尾杆,尾杆可与地面接触。
技术总结
一种轮腿可变式越障机器人,其包括机架、变形机构、传动机构,变形结构包括轴对称设置的一对可变形轮腿机构,同一可变形轮腿机构的变形爪可在变形电机的驱动下收缩并环绕共同组成轮状形状;变形爪可在变形电机的驱动下向变形轮盘外周侧伸展形成腿状结构;本发明所述的一种轮腿可变式越障机器人综合利用曲柄和滑块的复合机构原理实现了较大变形率的可变形轮腿机构,有效的利用了圆弧腿的长度作为腿的直径,增加了可变形轮腿机构的变形率,且提出一种全新的单变形率的可变形轮腿机构,能够相对简单的控制可变形轮腿机构的变形,并且变形模块独立于行动模块,可以做到机器人移动的时候同时变形。
技术研发人员:赵玉侠,周俊成,赵全亮,袁俊杰,钮乾坤,万学锋
受保护的技术使用者:北方工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!