车辆尾翼的控制方法、装置、车辆及存储介质与流程
本技术涉及车辆,特别涉及一种车辆尾翼的控制方法、装置、车辆及存储介质。
背景技术:
1、汽车行业在“新四化”驱动下,正在发生深层次的变革,这期间赋予了汽车更丰富的使用功能,给人们的生活带来了更便利化的体验。动尾翼不仅能够较有效地引导顶部气流分离,延长分离点,同时通过控制其上表面的角度可直接控制车顶高速气流的出射方向,进而改变尾涡结构,控制整车风阻系数,并且设置尾翼也能够起到装饰作用,使得汽车造型效果更具运动感。
2、目前主流控制电动尾翼最常见的方式是手动控制,应用场景较为单一,无法满足复杂的用车场景,并且大多采用can(controller area network,控制器局部网)总线通信的方式,无法实现功能的灵活重组,无法解决面向信号的通信架构中因个别信号增减/变更,而导致功能相关的所有系统均产生变更的问题;ecu(electronic control unit,电子控制单元)由不同的供应商开发,框架无法复用,模块之间的耦合度太高,功能模块复用率非常低,牵一发而动全身,任何功能的更改,都将带来巨大的工作量。
3、相关技术提供一种汽车电动尾翼控制系统,通过采集并发送汽车的运行速度至尾翼控制装置,避免以往通过gps(global positioning system,全球定位系统)获取汽车运行参数信息时,因通信环境差导致的信号采集及发送效率低的问题。虽然通过该种方式能够获取汽车运行参数信息,但采用can总线将尾翼控制装置的数据通信模块与汽车电脑连接无法保证数据传输的速度、距离、质量和稳定性。随着汽车电子系统的不断发展,can总线通信的方式,无法实现功能的灵活重组,无法解决面向信号的通信架构中因个别信号增减/变更,而导致功能相关的所有系统均产生变更的问题。
技术实现思路
1、本技术提供一种车辆尾翼的控制方法、装置、车辆及存储介质,以解决电动尾翼多为手动控制,应用场景较为单一,无法满足复杂的用车场景,且通信架构无法复用,模块之间的耦合度太高,功能模块复用率非常低的问题,提供手动模式功能和自动模式两种不同的尾翼升降控制方式,同时具备调节尾翼高度的档位设置,改善车辆空气动力学性能,提升操控性和高速驾驶安全性,并且采用soa的理念实现功能的灵活重组。
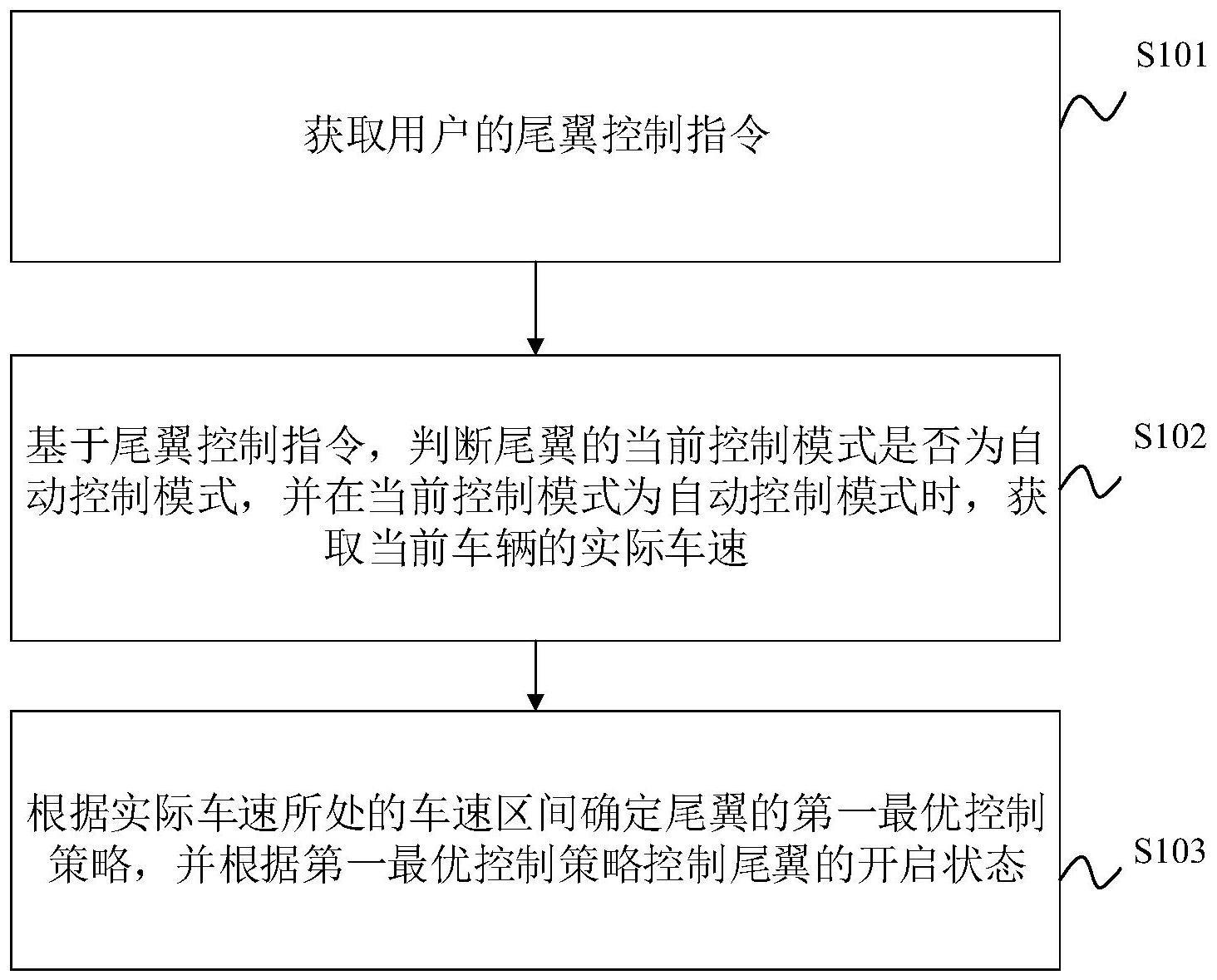
2、本技术第一方面实施例提供一种车辆尾翼的控制方法,包括以下步骤:获取用户的尾翼控制指令;基于所述尾翼控制指令,判断所述尾翼的当前控制模式是否为自动控制模式,并在所述当前控制模式为所述自动控制模式时,获取当前车辆的实际车速;以及根据所述实际车速所处的车速区间确定所述尾翼的第一最优控制策略,并根据所述第一最优控制策略控制所述尾翼的开启状态。
3、可选地,在一些实施例中,所述尾翼的开启状态包括全开启状态、半开启状态和关闭状态中的至少一种。
4、可选地,在一些实施例中,所述根据所述实际车速所处的车速区间确定所述尾翼的第一最优控制策略,并根据所述第一最优控制策略控制所述尾翼的开启状态,还包括:在所述实际车速处于第一车速区间时,确定所述尾翼的第一最优控制策略为全开启策略,并根据所述全开启策略控制所述尾翼处于全开启状态;在所述实际车速处于第二车速区间时,确定所述尾翼的第一最优控制策略为半开启策略,并根据所述半开启策略控制所述尾翼处于半开启状态;在所述实际车速处于第三车速区间时,确定所述尾翼的第一最优控制策略为关闭策略,并根据所述关闭策略控制所述尾翼处于关闭状态。
5、可选地,在一些实施例中,所述第一车速区间的最小值大于或等于所述第二车速区间的最大值,所述第二车速区间的最小值大于或等于所述第三车速区间的最大值。
6、可选地,在一些实施例中,在判断所述尾翼的当前控制模式是否为所述自动控制模式之后,还包括:若所述当前控制模式不是所述自动控制模式,则判定所述当前控制模式为手动控制模式,则获取所述尾翼的触发信号;若所述触发信号为开启信号,则控制所述尾翼开启;若所述触发信号为关闭信号或行李箱打开信号,则控制所述尾翼关闭。
7、可选地,在一些实施例中,根据所述第一最优控制策略控制所述尾翼的开启状态之后,还包括:判断所述尾翼是否达到目标开启状态;若所述尾翼未达到目标开启状态,则检测外力成因,并根据所述外力成因确定所述尾翼的第二最优控制策略,并根据所述第二最优控制策略对所述尾翼进行控制。
8、可选地,在一些实施例中,上述的车辆尾翼的控制方法,还包括:检测所述尾翼的电机温度;若所述电机温度高于预设阈值时,控制所述尾翼进入过热保护状态。
9、本技术第二方面实施例提供一种车辆尾翼的控制装置,包括:获取模块,用于获取用户的尾翼控制指令;判断模块,用于基于所述尾翼控制指令,判断所述尾翼的当前控制模式是否为自动控制模式,并在所述当前控制模式为所述自动控制模式时,获取当前车辆的实际车速;以及控制模块,用于根据所述实际车速所处的车速区间确定所述尾翼的第一最优控制策略,并根据所述第一最优控制策略控制所述尾翼的开启状态。
10、可选地,在一些实施例中,所述尾翼的开启状态包括全开启状态、半开启状态和关闭状态中的至少一种。
11、可选地,在一些实施例中,所述控制模块,还包括:第一控制单元,用于在所述实际车速处于第一车速区间时,确定所述尾翼的第一最优控制策略为全开启策略,并根据所述全开启策略控制所述尾翼处于全开启状态;第二控制单元,用于在所述实际车速处于第二车速区间时,确定所述尾翼的第一最优控制策略为半开启策略,并根据所述半开启策略控制所述尾翼处于半开启状态;第三控制单元,用于在所述实际车速处于第三车速区间时,确定所述尾翼的第一最优控制策略为关闭策略,并根据所述关闭策略控制所述尾翼处于关闭状态。
12、可选地,在一些实施例中,所述第一车速区间的最小值大于或等于所述第二车速区间的最大值,所述第二车速区间的最小值大于或等于所述第三车速区间的最大值。
13、可选地,在一些实施例中,在判断所述尾翼的当前控制模式是否为所述自动控制模式之后,所述判断模块,还包括:第一判定单元,用于在所述当前控制模式不是所述自动控制模式时,判定所述当前控制模式为手动控制模式,则获取所述尾翼的触发信号;控制单元,用于在所述触发信号为开启信号时,控制所述尾翼开启,在所述触发信号为关闭信号或行李箱打开信号时,控制所述尾翼关闭。
14、可选地,在一些实施例中,根据所述第一最优控制策略控制所述尾翼的开启状态之后,所述控制模块,还包括:判断单元,用于判断所述尾翼是否达到目标开启状态;检测单元,用于在所述尾翼未达到目标开启状态时,检测外力成因,并根据所述外力成因确定所述尾翼的第二最优控制策略,并根据所述第二最优控制策略对所述尾翼进行控制。
15、可选地,在一些实施例中,上述的车辆尾翼的控制装置,还包括:检测模块,用于检测所述尾翼的电机温度;过热保护模块,用于在所述电机温度高于预设阈值时,控制所述尾翼进入过热保护状态。
16、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆尾翼的控制方法。
17、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆尾翼的控制方法。
18、由此,通过获取用户的尾翼控制指令,并基于尾翼控制指令,判断尾翼的当前控制模式是否为自动控制模式,并在当前控制模式为自动控制模式时,获取当前车辆的实际车速,并根据实际车速所处的车速区间确定尾翼的第一最优控制策略,并根据第一最优控制策略控制尾翼的开启状态。由此,解决了电动尾翼多为手动控制,应用场景较为单一,无法满足复杂的用车场景,且通信架构无法复用,模块之间的耦合度太高,功能模块复用率非常低的问题,提供手动模式功能和自动模式两种不同的尾翼升降控制方式,同时具备调节尾翼高度的档位设置,改善车辆空气动力学性能,提升操控性和高速驾驶安全性,并且采用soa的理念实现功能的灵活重组。
19、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!