一种多轮同步变向底盘及机器人
本发明属于机器人,具体涉及一种多轮同步变向底盘及机器人。
背景技术:
1、现有的机器人移动底盘主要有轮式、履带式、轮履复合式、腿足式和蠕动式等,分别适用于各种不同的场合。其中,轮式移动底盘最为常见,具有速度快,机动性好等优点。
2、对于在室内或狭小空间中作业的全方位移动机器人,需要移动底盘具有转弯半径小、灵活性强等特点,同步转向和原地转向是常用的两种解决方案。其中原地360°转向多为独立驱动的二轮和四轮驱动,主要通过两侧车轮的转数差来实现预定角度的转向。实际应用中,全方位移动机器人通过独立驱动实现全方位移动,即通过为每一个车轮配备两个电机,一个电机负责行走,另一个电机作为转向舵机来负责转向。由于全方位移动机器人每一个车轮均需要配备行走电机和转向舵机,并且需要二者配合才能实现全方位移动,当车轮数量较多时,过多的电机不但会增加机器人系统的结构复杂度和能耗,而且导致占用空间更大。中国实用新型专利(公开号:cn208881960u,申请日:2019.05.21)公开了机器人及其底盘结构,该底盘结构包括底盘支架、对称设于底盘支架左右两侧的悬挂支架、分别与两悬挂支架活动连接的两驱动轮,以及对称设于底盘支架前后两端的两万向轮,还包括分别设于两驱动轮外侧的两固定轮,两固定轮的中心轴线、两驱动轮的中心轴线与底盘支架的中心轴线重合。本实用新型中,在底盘支架的左右两侧且位于两驱动轮外侧设置固定轮,使地面作用于底盘的支撑点与底盘的中心距离更远,同时在底盘支架前后两万向轮作用下,机器人运动更加平稳不易倾倒;两固定轮与两驱动轮均设置在底盘支架的中心轴线上,使机器人可绕中心轴线旋转,在狭小空间运动更加灵活。但是,该该底盘结构并未考虑电源线和信号线安装设计的问题。在实际应用中,多数的车轮方向控制装置采用直接走线的方式,实现电源线和信号线等线束的导通,由于驱动车轮的电机随着车轮转动,电机连接电源的导线也随着车轮转动,若车轮朝着一个方向无限旋转则导线会缠绕在车轮上,因此,其转向被限制在360度范围内,无法向一个方向无限旋转,使得轮组运动时需要突然回转180度或360度以保持在所限定的360度范围内,导致机器人转向不灵活,运行不够平稳。
技术实现思路
1、本发明旨在至少解决上述背景技术中提出的技术问题之一,提供一种多轮同步变向底盘及机器人,能够实现车轮的同步灵活转向,解决底盘车轮内部走线存在的限制车轮旋转运动范围的问题。
2、为达到上述目的,本发明所采用的技术方案是:
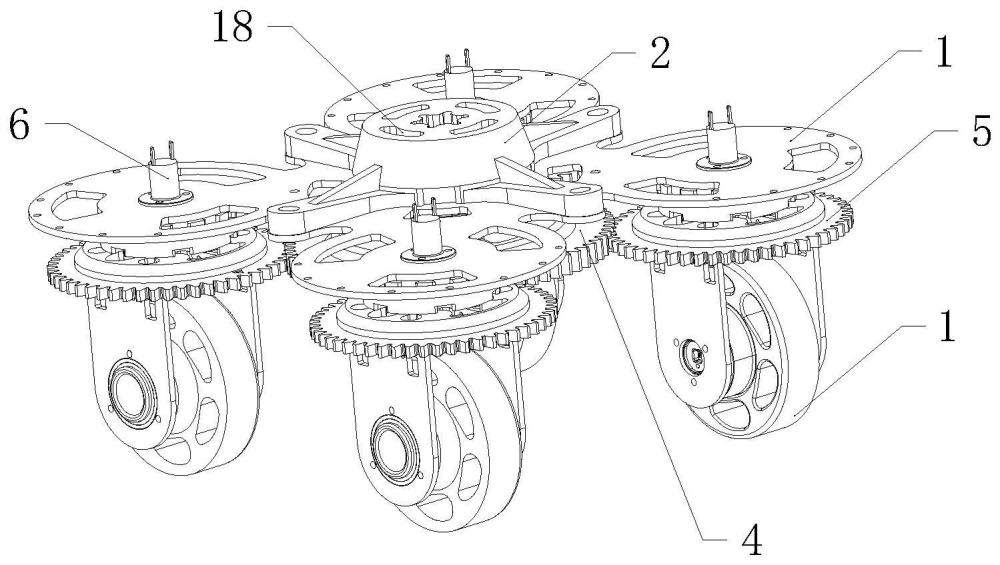
3、第一方面,本发明提供一种多轮同步变向底盘,包括底盘框架、转向机构和轮组机构,所述底盘框架的中部具有安装孔,所述转向机构包括固定件、转向电机、中心齿轮、行星齿轮、电滑环和转盘;所述固定件安装在所述底盘框架上并与所述安装孔相对应,所述固定件的中部向上延伸形成一空心凸台,所述转向电机安装在所述空心凸台内,所述转向电机的输出轴与所述中心齿轮连接,用于驱动所述中心齿轮转向;所述中心齿轮的外周均匀分布有若干个行星齿轮,若干个所述行星齿轮与所述中心齿轮啮合;所述底盘框架的上部设有电滑环,所述底盘框架的下部设有所述转盘,所述电滑环、转盘均与所述行星齿轮均同轴设置;所述轮组机构包括安装架、滚轮、轮轴、固定轴架和驱动电机;所述安装架与所述转盘的下部连接;所述滚轮安装在所述安装架内,所述滚轮的一端通过轮轴与所述安装架连接,所述滚轮的另一端通过驱动电机与所述安装架连接,所述驱动电机的输出轴与所述滚轮连接用于驱动所述滚动转动。
4、进一步的,所述电滑环包括转子部件和转动套在所述转子部件外侧的定子部件,所述定子部件包括滑环定子、定子插接件和安装法兰;所述滑环定子与所述定子插接件固定连接,所述安装法兰固定设置在所述滑环定子的外周壁上并与所述底盘框架固定连接;所述转子部件包括滑环转子和转子插接件;所述滑环转子与所述转盘连接;所述滑环转子内部中空,所述转子插接件穿设在所述滑环转子内,所述滑环转子与所述转盘连接。
5、进一步的,所述空心凸台的端面设有若干个散热孔。
6、进一步的,所述行星齿轮的数量为四个,四个所述行星齿轮呈矩阵分布。
7、进一步的,所述安装架包括横板以及垂直设置在所述横板底部两侧的内侧板和外侧板,所述内侧板和外侧板的顶部与所述行星齿轮的底部连接。
8、第二方面,本发明提供一种机器人,该机器人包括第一方面所述的多轮同步变向底盘。
9、与现有技术相比,本发明具有以下有益效果:
10、本发明的一种多轮同步变向底盘,通过设置底盘框架、转向机构和轮组机构以构建能够360°无限旋转的机器人底盘结构;其中,利用转向电机驱动中心齿轮以及行星齿轮同步转动,实现四驱驱动,提高同步转动的能力,能够节约动力源,使得内部结构更加紧凑简洁。再者,通过在底盘框架的上部设置电滑环,能够有效避免车轮导线缠绕的问题,没有车轮内部走线存在的限制车轮旋转运动范围的问题,而且能够实现轮组机构360°的连续性同时运动。
11、本发明的电滑环包括转子部件和转动套在所述转子部件外侧的定子部件;所述定子部件与所述底盘框架固定连接;所述转子部件与所述转盘固定连接;通过电连接的转子部件和定子部件实现电源线和信号线等线束的导通,且定子部件和转子部件可以相对旋转,可以避免车轮在旋转过程中造成的线路缠绕问题,从而实现无限旋转,扩大了车轮运动范围,提高了机器人转向的灵活性和运行的平稳度。并且,线束不会反复来回扭曲,提高了连线的可靠性和寿命。
12、本发明能够适应狭小空间内转向运动,每轮均为矢量驱动输出,无速度损耗,运行稳定,可全向移动,平移旋转平稳,无颠簸。
技术特征:
1.一种多轮同步变向底盘,包括底盘框架(1)、转向机构和轮组机构,其特征在于:所述底盘框架(1)的中部具有安装孔,所述转向机构包括固定件(2)、转向电机(3)、中心齿轮(4)、行星齿轮(5)、电滑环(6)和转盘(7);所述固定件(2)安装在所述底盘框架(1)上并与所述安装孔相对应,所述固定件(2)的中部向上延伸形成一空心凸台,所述转向电机(3)安装在所述空心凸台内,所述转向电机(3)的输出轴与所述中心齿轮(4)连接,用于驱动所述中心齿轮(4)转向;所述中心齿轮(4)的外周均匀分布有若干个行星齿轮(5),若干个所述行星齿轮(5)与所述中心齿轮(4)啮合;所述底盘框架(1)的上部设有电滑环(6),所述底盘框架(1)的下部设有所述转盘(7),所述电滑环(6)、转盘(7)均与所述行星齿轮(5)均同轴设置;所述轮组机构包括安装架(8)、滚轮(9)、轮轴(10)、固定轴架和驱动电机(12);所述安装架(8)与所述转盘(7)的下部连接;所述滚轮(9)安装在所述安装架(8)内,所述滚轮(9)的一端通过轮轴(10)与所述安装架(8)连接,所述滚轮(9)的另一端通过驱动电机(12)与所述安装架(8)连接,所述驱动电机(12)的输出轴与所述滚轮(9)连接用于驱动所述滚动转动。
2.根据权利要求1所述的一种多轮同步变向底盘,其特征在于:所述电滑环(6)包括转子部件和转动套在所述转子部件外侧的定子部件,所述定子部件包括滑环定子(13)、定子插接件(14)和安装法兰(15);所述滑环定子(13)与所述定子插接件(14)固定连接,所述安装法兰(15)固定设置在所述滑环定子(13)的外周壁上并与所述底盘框架(1)固定连接;所述转子部件包括滑环转子(16)和转子插接件(17);所述滑环转子(16)与所述转盘(7)连接;所述滑环转子(16)内部中空,所述转子插接件(17)穿设在所述滑环转子(16)内,所述滑环转子(16)与所述转盘(7)连接。
3.根据权利要求1所述的一种多轮同步变向底盘,其特征在于:所述空心凸台的端面设有若干个散热孔(18)。
4.根据权利要求1所述的一种多轮同步变向底盘,其特征在于:所述行星齿轮(5)的数量为四个,四个所述行星齿轮(5)呈矩阵分布。
5.根据权利要求1所述的一种多轮同步变向底盘,其特征在于:所述安装架(8)包括横板(19)以及垂直设置在所述横板(19)底部两侧的内侧板(20)和外侧板(21),所述内侧板(20)和外侧板(21)的顶部与所述行星齿轮(5)的底部连接。
6.一种机器人,其特征在于:包括权利要求1-5任一项所述的多轮同步变向底盘。
技术总结
本发明公开的一种多轮同步变向底盘及机器人,属于机器人技术领域。该多轮同步变向底盘包括底盘框架、转向机构和轮组机构,所述底盘框架的中部具有安装孔,所述转向机构包括固定件、转向电机、中心齿轮、行星齿轮、电滑环和转盘;所述固定件安装在底盘框架上,所述转向电机的输出轴与中心齿轮连接;所述中心齿轮的外周均匀啮合连接有若干个行星齿轮;所述底盘框架的上部设有电滑环,所述底盘框架的下部设有转盘,所述电滑环、转盘均与所述行星齿轮均同轴设置;所述轮组机构包括安装架、滚轮、轮轴、固定轴架和驱动电机;所述安装架与转盘的下部连接;本发明能够实现车轮的同步灵活转向,解决底盘车轮内部走线存在的限制车轮旋转运动范围的问题。
技术研发人员:席红霞,刘浩宇,南晓娟,张科研,欧跃发,覃蔡宏,鄂泽宇,陈嘉骏,许浩民,罗资渥,曾桌葆,黄正宁
受保护的技术使用者:北部湾大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!