能够快速紧固和拆卸的翻转臂的制作方法
本发明涉及机器人,尤其涉及一种能够快速紧固和拆卸的翻转臂。
背景技术:
1、履带翻转臂是是一种机械装置,用于将履带车辆的履带从水平位置翻转到垂直位置。它通常由一个翻转臂和一个履带张紧装置组成,其中翻转臂固定在车辆的底盘上,而履带张紧装置则固定在履带上。
2、履带翻转臂的作用是在越野行驶时提高车辆的通过性。当车辆行驶在崎岖不平的地形上时,履带可以提供更好的附着力,使车辆能够更好地行驶和操纵。因此,履带翻转臂的作用是在需要时将履带从水平位置翻转到垂直位置,以提高车辆的越野性能和通过性。履带翻转臂的工作原理是,当车辆需要越过障碍物时,翻转臂将被触发,将履带从水平位置翻转到垂直位置。这时,履带张紧装置将保持履带的张紧度,使履带能够更好地附着在地面上。一旦车辆越过障碍物,翻转臂将自动复位,将履带重新放回到水平位置。履带翻转臂的设计需要考虑多种因素,例如车辆的重量、尺寸和结构,以及地形和环境条件。因此,履带翻转臂需要具有高强度、高耐久性和高可靠性,以确保在各种恶劣的条件下都能够正常工作。
3、目前市面上的履带翻转臂安装过程相对复杂,需要耗费较多时间和精力。由于其结构的复杂性和重量的庞大,翻转臂的维修保养也相对困难。在维护过程中,需要对该装置进行全面的检查和测试,以确保其能够正常工作。这通常需要专业技术人员进行操作,以确保安全和有效性。
技术实现思路
1、本发明所要解决的技术问题是如何提供一种固定牢固、维护成本低、安装简单的翻转臂。
2、为解决上述技术问题,本发明所采取的技术方案是:一种能够快速紧固和拆卸的翻转臂,包括翻转臂本体,所述翻转臂驱动轮的轴心设置有转轴套,所述转轴套的内壁形成有内花键,翻转臂驱动轴与所述驱动轮连接的一端形成有外花键,所述外花键与所述内花键相适配,翻转臂驱动电机用于驱动翻转臂驱动轴转动,所述驱动轴驱动所述驱动轮转动。
3、进一步的技术方案在于:所述驱动轴的端部的中心形成有固定螺纹孔,当所述驱动轴插入到所述转轴套的内花键时,位于驱动轮外侧的固定件插入到所述固定螺纹孔内,将所述驱动轴的端部固定,防止所述驱动轴轴向运动。
4、采用上述技术方案所产生的有益效果在于:本申请中翻转臂驱动轴与所述翻转臂的驱动轮之间通过相互配合的花键连接,所需要的部件较少,安装方便,结构简单且便于后期维护,能够在特殊环境下也能正常工作,使用寿命长。
技术特征:
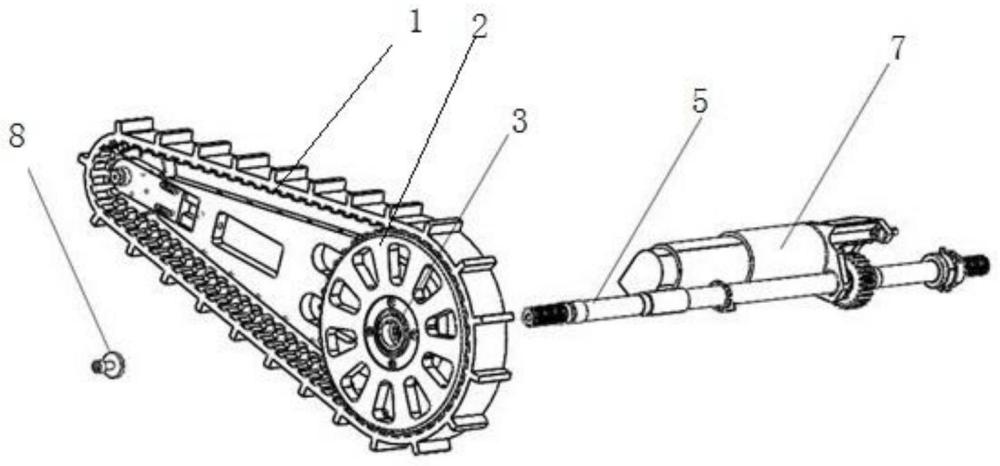
1.一种能够快速紧固和拆卸的翻转臂,其特征在于:包括翻转臂本体(1),所述翻转臂本体(1)上设置有翻转臂驱动轮(2),所述翻转臂驱动轮(2)的轴心设置有转轴套(3),所述转轴套(3)的内壁形成有内花键(4),翻转臂驱动轴(5)与所述驱动轮连接的一端形成有外花键(6),所述外花键(6)与所述内花键(4)相适配,翻转臂驱动电机(7)用于驱动翻转臂驱动轴(5)转动,所述驱动轴驱动所述驱动轮转动。
2.如权利要求1所述的能够快速紧固和拆卸的翻转臂,其特征在于:所述驱动轴的端部的中心形成有固定螺纹孔,当所述驱动轴插入到所述转轴套(3)的内花键(4)时,位于所述驱动轮外侧的固定件(8)插入到所述固定螺纹孔内,将所述驱动轴的端部固定,防止所述驱动轴轴向运动。
技术总结
本发明公开了一种能够快速紧固和拆卸的翻转臂,涉及机器人技术领域。所述翻转臂包括翻转臂本体,所述翻转臂本体上设置有翻转臂驱动轮,所述翻转臂驱动轮的轴心设置有转轴套,所述转轴套的内壁形成有内花键,翻转臂驱动轴与所述驱动轮连接的一端形成有外花键,所述外花键与所述内花键相适配,翻转臂驱动电机用于驱动翻转臂驱动轴转动,所述驱动轴驱动所述驱动轮转动。本申请中翻转臂驱动轴与所述翻转臂的驱动轮之间通过相互配合的花键连接,所需要的部件较少,安装方便,结构简单且便于后期维护,能够在特殊环境下也能正常工作,使用寿命长。
技术研发人员:孙振华,王文纪,曲明星,张其甲
受保护的技术使用者:上海合时智能科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!