用于检测发电机组膛内故障的爬壁机器人的制作方法
本申请涉及镜片测量,特别是涉及一种用于检测发电机组膛内故障的爬壁机器人。
背景技术:
1、目前,在工业生产和日常生活中,对一些具有垂直或倾斜面的大型罐体、管壁或大型机械设备等进行检测或探伤是常见的需求。然而,这些工作往往需要在恶劣环境下进行,或者受到高度限制,无法进行直接的人工检测。为了解决这个问题,爬壁机器人应运而生。爬壁机器人是一种特殊的机器人,具备在倾斜、垂直壁面等恶劣环境下进行特种作业的能力,能够从事危险、繁重及人力所不及的工作。
2、在电力行业中,发电机是电站的核心设备之一。由于发电机长时间运行,定子槽楔松动、绝缘损坏和铁心磨损等问题常常会发生。这些问题的存在可能会危及发电机的安全运行,甚至导致电机运行事故。因此,对发电机定子膛内部的槽楔松紧状态、绝缘状态和铁心磨损情况进行定期检测对于保证电机的正常运行具有重要意义。
3、然而,现有的检测方法需要抽出发电机转子,并由工人携带检测设备进入发电机内部进行检测。这种方法不仅耗费大量的人力物力,而且检测效率低,导致停产损失较大。
技术实现思路
1、本申请实施例提供了一种用于发电机组膛内故障检测的爬壁机器人,以至少解决相关技术中发电机组膛内故障检测工作效率低的问题。
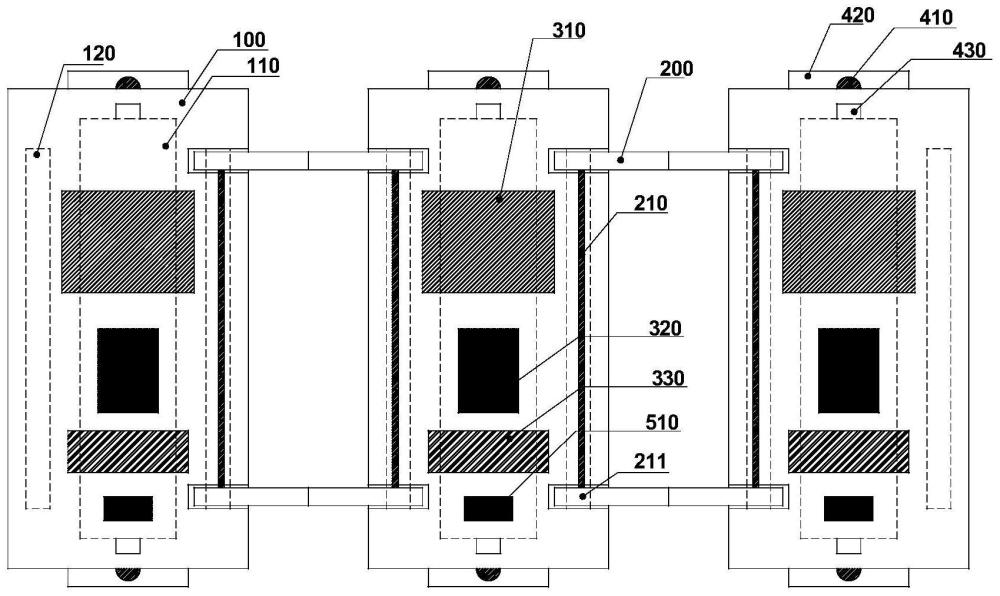
2、第一方面,本申请实施例提供了一种用于发电机组膛内故障检测的爬壁机器人,包括至少两个移动体,相邻所述移动体之间通过伸缩组件连接,所述伸缩组件用于调节相邻所述移动体沿第一方向的间距;
3、所述移动体包括;
4、磁吸组件,所述磁吸组件的磁力可控,用于吸附发电机组内壁;
5、移动组件,用于接触所述发电机组内壁,并沿第二方向移动,所述第二方向与所述第一方向形成有夹角;
6、检测组件,用于获取电机组膛内故障信息;以及
7、控制组件,与所述磁吸组件电性连接,用于控制所述磁吸组件的磁力强度;与所述移动组件电性连接,用于驱动所述移动组件移动。
8、在一实施例中,所述伸缩组件包括:
9、伸缩导杆,所述伸缩导杆一端与所述移动体固定连接,另一端与相邻的所述移动体固定连接;
10、导杆支架,用于支撑伸缩导杆;以及
11、伸缩导杆驱动模组,用于驱动所述伸缩导杆伸缩,所述伸缩导杆驱动模组与所述控制组件电性连接。
12、在一实施例中,磁吸组件包括:
13、电磁铁,所述电磁铁固定安装于所述移动体内部,与所述发电机组内壁磁吸式连接;
14、电磁铁磁力调节模组,用于调节所述电磁铁的磁力大小,所述电磁铁与所述电磁铁磁力调节模组电性连接,所述电磁铁磁力调节模组与所述控制组件电性连接。
15、在一实施例中,所述移动组件包括:
16、履带,所述履带安装在所述移动体上,用于使所述移动体在所述发电机组内壁上沿所述第二方向移动;
17、履带驱动模组,用于驱动所述履带转动,所述履带驱动模组与所述控制组件电性连接。
18、在一实施例中,所述检测组件包括,
19、摄像头检测模组,用于实时采集图像和/或视频数据,并传送至监控系统;
20、超声波检测模组,用于根据检测到的超声波信号判断所述移动体是否到达所述发电机组的末端;以及
21、照明辅助模组,用于对所述摄像头检测模组和超声波检测模组进行辅助照明。
22、在一实施例中,所述摄像头检测模组包括:
23、摄像单元,所述摄像单元分别固定安装于所述移动体的两端,所述摄像单元包括与所述移动体转动连接的摄像头,所述摄像头的转动轴向平行于所述第一方向。
24、在一实施例中,所述照明辅助模组包括:
25、发光源,所述发光源位于所述摄像单元的一侧;
26、保护板,所述保护板位于所述发光源的上方,用于保护所述发光源。
27、在一实施例中,超声波检测模组包括:
28、超声波探头,所述超声波探头安装于所述移动体的两端。
29、在一实施例中,所述控制组件与所述检测组件电性连接;所述控制组件用于:
30、响应所述摄像头检测模组开启,控制所述照明辅助模组开启,
31、响应检测到所述超声波信号为到达所述发电机组的末端,所述移动组件停止移动。
32、在一实施例中,所述伸缩导杆具备与所述发电机组内壁曲率相适配的弧形结构。
33、本申请实施例提供的一种用于发电机组膛内故障检测的爬壁机器人至少具有以下技术效果。
34、在本申请中,相邻移动体之间通过伸缩组件连接,伸缩组件用于调节相邻移动体沿第一方向的间距;移动体包括;磁吸组件,磁吸组件的磁力可控,用于吸附发电机组内壁;移动组件,用于接触发电机组内壁,并沿第二方向移动,第二方向与第一方向形成有夹角;检测组件,用于获取电机组膛内故障信息;以及控制组件,与磁吸组件电性连接,用于控制磁吸组件的磁力强度;与移动组件电性连接,用于驱动移动组件移动。通过伸缩组件、磁吸组件、移动组件、检测组件和控制组件的相互配合,使得爬壁机器人实现了在发电机组膛内进行故障检测,解决相关技术中发电机组膛内故障检测工作效率低的问题,有效提高了发电机组膛内故障检测的工作效率。
35、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种用于检测发电机组膛内故障的爬壁机器人,其特征在于,包括至少两个移动体,相邻所述移动体之间通过伸缩组件连接,所述伸缩组件用于调节相邻所述移动体沿第一方向的间距;
2.根据权利要求1所述的爬壁机器人,其特征在于,所述伸缩组件包括:
3.根据权利要求1所述的爬壁机器人,其特征在于,磁吸组件包括:
4.根据权利要求1所述的爬壁机器人,其特征在于,所述移动组件包括:
5.根据权利要求1所述的爬壁机器人,其特征在于,所述检测组件包括,
6.根据权利要求5所述的爬壁机器人,其特征在于,所述摄像头检测模组包括:
7.根据权利要求6所述的爬壁机器人,其特征在于,所述照明辅助模组包括:
8.根据权利要求5所述的爬壁机器人,其特征在于,超声波检测模组包括:
9.根据权利要求5所述的爬壁机器人,其特征在于,所述控制组件与所述检测组件电性连接;所述控制组件用于:
10.根据权利要求2所述的一种用于检测发电机组膛内故障的爬壁机器人,其特征在于,所述伸缩导杆具备与所述发电机组内壁曲率相适配的弧形结构。
技术总结
本申请涉及一种用于发电机组膛内故障检测的爬壁机器人,包括至少两个移动体,相邻移动体之间通过伸缩组件连接,伸缩组件用于调节相邻移动体沿第一方向的间距;移动体包括;磁吸组件,磁吸组件的磁力可控,用于吸附发电机组内壁;移动组件,用于接触发电机组内壁,并沿第二方向移动,第二方向与第一方向形成有夹角;检测组件,用于获取电机组膛内故障信息;以及控制组件,与磁吸组件电性连接,用于控制磁吸组件的磁力强度;与移动组件电性连接,用于驱动移动组件移动。通过伸缩组件、磁吸组件、移动组件、检测组件和控制组件的相互配合,解决相关技术中发电机组膛内故障检测工作效率低的问题,有效提高了发电机组膛内故障检测的工作效率。
技术研发人员:张平,李志军,马党国,牛斌,王怀祥,杨天,郭剑雄,冯重阳,朱浩然
受保护的技术使用者:华电电力科学研究院有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!