一种适用于桥梁维护的爬壁机器人系统的制作方法
本发明涉及检测设备,尤其涉及一种适用于桥梁维护的爬壁机器人系统。
背景技术:
1、钢箱梁因具有自重小、抗弯刚度大、抗风性能好、吊装方便等优点而广泛应用于大跨度桥梁中。但是,由于桥梁长期承受车辆载荷等原因,钢箱梁可能存在疲劳开裂、焊缝缺陷等病害,严重影响大跨度桥梁的服役性能。因此,需要对钢箱梁的疲劳损伤状态进行检测,为其后续维护提供依据。
2、钢箱梁的疲劳损伤检测主要通过人工定期检测,主要是借助爬梯使检测人员到达目标壁面,然后检测人员通过肉眼或手持探伤仪器等方式开展检测作业,这种检测方式存在检测效率低、无效作业时间长、劳动强度大、检测准确率低、巡检周期长以及存在安全隐患等问题;
3、针对上述问题,专利号为cn111270608b的中国发明专利公开了一种大跨度桥梁钢箱梁内检测的爬壁机器人,其包括机器人本体、安装在机器人本体上的电源模块、运动控制系统、摄像头模块和无损探伤模块,还包括安装于机器人底板上的提升机构,提升机构用于辅助机器人翻越钢箱梁的内直角壁面;
4、上述方案虽具有结构简单、壁面适应性强、越障性能好等优点;同时还能够实现自动巡检;但其因受限于自身结构,转向灵活性差;且如图15所示,钢箱梁的内底上一般设有大量的用于加强结构强度的竖板001(横肋板),竖板001的存在会大大限制上述方案中爬壁机器人的移动,且会因竖板001的存在导致行进路面不平整进而导致上述方案中的机器人行进的稳定性大大降低,行进时震动频繁进而影响拍摄稳定性和检测的准确性。
技术实现思路
1、本技术实施例通过提供一种适用于桥梁维护的爬壁机器人系统,解决了现有技术中爬壁机器人转向灵活性和行驶稳定性差的技术问题,以及行驶过程中因受限于自身结构以及行驶面的形状导致的拍摄稳定性及检测准确性相对较差的技术问题,实现了适用于桥梁维护的爬壁机器人系统的转向灵活性、行驶稳定性、拍摄稳定性以及检测准确性均相对较好的技术效果。
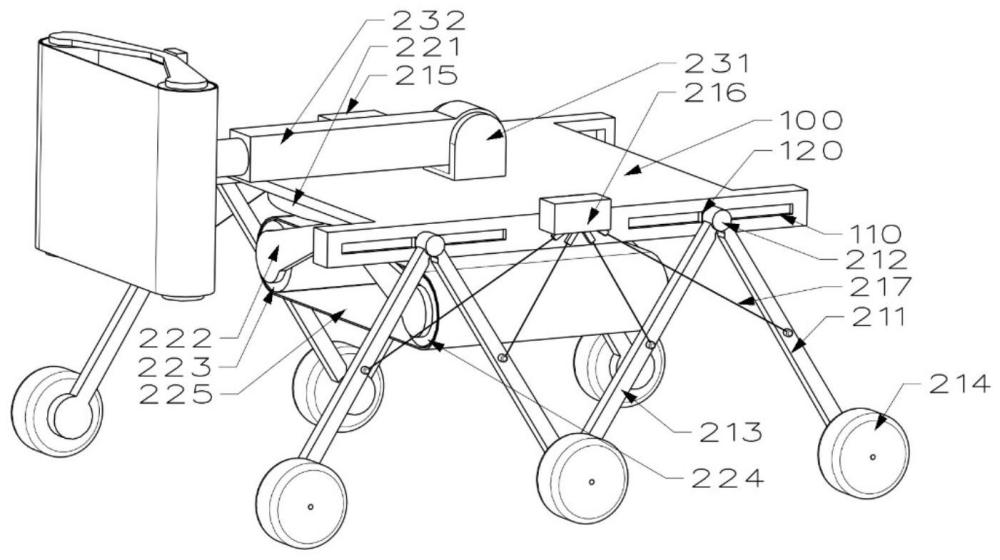
2、本技术实施例提供了一种适用于桥梁维护的爬壁机器人系统,包括机器人本体,机器人本体包括支撑板和行进装置;
3、支撑板两侧设有滑动导向槽,每一侧的滑动导向槽上设有两个滑动块;
4、所述行进装置包括第一行进组件和第二行进组件;
5、第一行进组件包括分别定位在支撑板的两侧的两个m形支撑框、转动行进轮、拉拽塑形组件;
6、m形支撑框包括3个承载柱和4个承载杆;承载柱和承载杆交替的转动连接在一起并组成m形的杆组,m形支撑框的顶部端点定位在滑动块上,底部端点定位有转动行进轮,连接位置均定位有扭簧;
7、拉拽塑形组件包括拉拽卷扬和拉拽绳;
8、拉拽绳与承载杆一一对应,均一端固定在承载杆的中部,另一端定位在拉拽卷扬上;
9、第二行进组件包括转动盘、框架结构且固定在转动盘上的承载框、第一滚筒、第二滚筒和行进履带;转动盘转动连接在支撑板的底部;第一滚筒及第二滚筒转动连接在承载框上;行进履带为软管形,套在第一滚筒和第二滚筒上,始终处于紧绷状态。
10、进一步的,位于m形支撑框端部的两个承载杆一端定位有转动行进轮,另一端转动连接在承载柱上,这两个承载杆对应的承载柱分别固定在位于支撑板一侧的两个滑动块上,且这两个承载柱的轴向与支撑板的宽度方向相同;
11、位于m形支撑框中部的两个承载杆均一端转动连接在固定在滑动块上的承载柱上,另一端转动连接在未固定的承载柱上,该承载柱上定位有转动行进轮。
12、进一步的,所述第一滚筒和第二滚筒结构相同,第一滚筒包括内芯和套设固定在内芯上的软质管,软质管为海绵管,直径为内芯直径的1.5倍以上。
13、优选的,还包括稳定行进组件;
14、所述稳定行进组件定位在所述支撑板的顶部,包括承载架、转动伸缩杆、浮动杆、缓冲簧和行进体;
15、所述承载架为框架结构或板体,固定在所述支撑板的顶部靠近中心的位置;
16、所述转动伸缩杆为电动伸缩杆,一端转动连接在所述承载架上,转动轴的轴向与支撑板的宽度方向相同;
17、转动伸缩杆与承载架的连接位置定位有微型电机;
18、转动伸缩杆远离所述承载架的一端设有限位槽;
19、所述浮动杆为柱状杆体,滑动定位在所述限位槽中,滑动的方向与转动伸缩杆的轴向相同;
20、所述缓冲簧位于限位槽内,为压簧,一端抵触在浮动杆上,另一端抵触在限位槽的槽底;
21、所述行进体的结构与第二行进组件的结构相同,固定在所述浮动杆远离转动伸缩杆的一端。
22、优选的,所述行进履带为管形的弹性橡胶囊体,其内填充满了液体介质;液体介质受自身重力的影响,大多数会集中在行进履带下半部分;行进过程中行进履带的底部会嵌在钢箱梁内底上的竖板上。
23、优选的,所述液体介质为磁流体或水。
24、优选的,所述行进履带由两片管形的片体缝合而成,其中一个紧贴第二滚筒及第一滚筒的片体的厚度为另一个片体厚度的1.5倍以上。
25、优选的,所述承载框上还固定有柱体承载架,柱体承载架上固定有摩擦柱;
26、所述摩擦柱位于行进履带的一侧靠近第二滚筒的位置,为由钢丝缠绕而成的圆柱;
27、所述摩擦柱的底部低于第二滚筒的底部0.5厘米以上;
28、机器人行进时,摩擦柱会首先与钢箱梁的内底及竖板接触。
29、优选的,所述承载框包括固定板、第一承载附件和第二承载附件;
30、所述固定板固定在所述转动盘的底部;
31、所述第一承载附件和第二承载附件结构相同且对称设置,分别定位在固定板的两侧且均起到承载第一滚筒及第二滚筒的作用;
32、所述第一承载附件包括第一弧形杆、第二弧形杆和伸缩控制杆;
33、第一弧形杆和第二弧形杆均为弧形杆体,二者结构相同、对称设置且二者的组合呈八字形;
34、所述第一弧形杆和第二弧形杆的顶部均转动连接在固定板的侧面上,转动轴的轴向与第一滚筒的轴向相同;
35、所述第一滚筒和第二滚筒分别转动连接在第一弧形杆和第二弧形杆上,且第一滚筒和第二滚筒靠近第一弧形杆及第二弧形杆的远离固定板的端部设置;
36、所述伸缩控制杆为电动伸缩杆,横向设置,两端分别转动连接在第一弧形杆和第二弧形杆上,转动轴的轴向与第一滚筒的轴向相同;
37、伸缩控制杆与第一弧形杆及第二弧形杆的连接点位于第一弧形杆及第二弧形杆的中心靠上的位置。
38、优选的,使用时,能够通过控制第一滚筒和第二滚筒之间的间距控制竖板嵌入行进履带的深度进而灵活的调整机器人行进的稳定性和行驶的灵活性。
39、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
40、通过对现有技术中的大跨度桥梁钢箱梁内检测的爬壁机器人的机器人本体的结构进行优化改进,使用两套行进组件相互配合进行行驶与跨越障碍物;有效解决了现有技术中爬壁机器人转向灵活性和行驶稳定性差的技术问题,以及行驶过程中因受限于自身结构以及行驶面的形状导致的拍摄稳定性及检测准确性相对较差的技术问题,进而实现了适用于桥梁维护的爬壁机器人系统的转向灵活性、行驶稳定性、拍摄稳定性以及检测准确性均相对较好的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!