一种车门安装设备及其安装方法与流程
本申请属于汽车生产,具体而言,涉及一种车门安装设备及其安装方法。
背景技术:
1、现有车门大多采用人工搬运安装或人工借助吊具进行安装,整个操作过程非常吃力,效率较低,同时每个车门安装需要配置大量人工,大大提高了人工成本,且安装精度差。
技术实现思路
1、为了克服现有技术中的上述缺点,本申请的目的在于提供一种车门安装设备及其安装方法,可保证定位精度,操作方便,大大降低人工成本。
2、本申请为了解决上述的技术问题所采用的技术手段是:
3、本申请中提供一种车门安装设备,包括:
4、第一运载装置,所述第一运载装置用于运载车架;
5、第二运载装置,所述第二运载装置用于运载车门;
6、抓手装置,所述抓手装置用于抓取车门;
7、机器手,所述机器手与所述抓手装置连接,用于带动所述抓手装置;
8、装载装置,所述装载装置用于将车门装载到所述车架;
9、第一视觉装置,所述第一视觉装置用于识别车架和车门的相对位置;
10、第二视觉装置,所述第二视觉装置用于识别车架和车门的装载位置。
11、优选地,还包括校核装置,所述校核装置用于校核抓手装置抓住车门的位置。
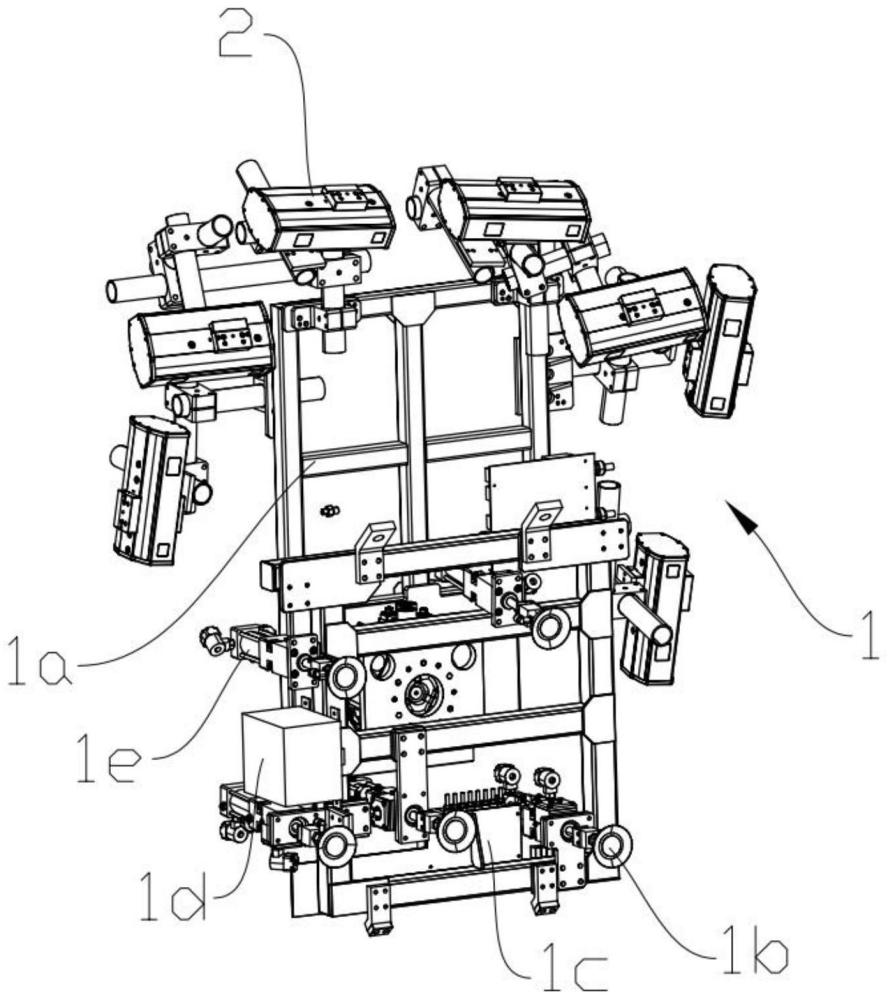
12、优选地,所述抓手装置包括支架、吸盘、阀岛控制器、伺服控制器和伺服电缸,所述支架与所述机器人连接,所述吸盘、阀岛控制器、伺服控制器、伺服电缸和第一视觉装置安装于所述支架,所述伺服控制器与所述伺服气缸连接,所述阀岛控制器与所述吸盘连接,所述吸盘与所述伺服气缸连接。
13、优选地,所述第二视觉装置安装于所述装载装置。
14、优选地,所述装载装置为螺栓拧紧装置,所述第二视觉装置用于识别螺栓孔的位置。
15、优选地,所述第一视觉装置和所述第二视觉装置均为激光传感器。
16、优选地,还包括第三视觉装置,所述第三视觉装置用于识别车门和车架的类型。
17、本申请还公开一种如上述任一项所述的车门安装设备的安装方法,包括步骤:
18、机器手带动抓手装置抓取车门;
19、第一视觉装置识别车架和车门的相对位置,机器手带动抓手装置将车门移动到车门指定位置进行匹配;
20、匹配完成后,第二视觉装置识别车架和车门的装载位置,装载装置将车架和车门进行装载。
21、优选地,还包括校核装置,所述校核装置用于校核抓手装置抓住车门的位置;还包括步骤:机器手带动抓手装置抓取车门后,将车门移动到校核装置进行抓取位置校核。
22、优选地,还包括第三视觉装置,所述第三视觉装置用于识别车门和车架的类型;还包括步骤:第一视觉装置识别车架和车门的相对位置前,第三视觉装置识别车架和车门的类型,判断车门和车架是否同类型。
23、与现有技术相比,本申请的车门安装设备设置第一运载装置和第二运载装置,通过第一运载装置运输车架,第二运载装置运输车门,大大提高了车架和车门的运载效率,且节约了人工成本;同时,设置抓手装置、装载装置、第一视觉装置和第二视觉装置相互配合,实现自动将车门装载到车架上,效率高,且无需人工参与,大大降低了人工成本,也提高了装载的精准度。
技术特征:
1.一种车门安装设备,其特征在于,包括:
2.根据权利要求1所述的车门安装设备,其特征在于,还包括校核装置,所述校核装置用于校核抓手装置抓住车门的位置。
3.根据权利要求1所述的车门安装设备,其特征在于,所述抓手装置包括支架、吸盘、阀岛控制器、伺服控制器和伺服电缸,所述支架与所述机器人连接,所述吸盘、阀岛控制器、伺服控制器、伺服电缸和第一视觉装置安装于所述支架,所述伺服控制器与所述伺服气缸连接,所述阀岛控制器与所述吸盘连接,所述吸盘与所述伺服气缸连接。
4.根据权利要求1所述的车门安装设备,其特征在于,所述第二视觉装置安装于所述装载装置。
5.根据权利要求4所述的车门安装设备,其特征在于,所述装载装置为螺栓拧紧装置,所述第二视觉装置用于识别螺栓孔的位置。
6.根据权利要求1所述的车门安装设备,其特征在于,所述第一视觉装置和所述第二视觉装置均为激光传感器。
7.根据权利要求1所述的车门安装设备,其特征在于,还包括第三视觉装置,所述第三视觉装置用于识别车门和车架的类型。
8.一种如权利要求1-7任一项所述的车门安装设备的安装方法,其特征在于,包括步骤:
9.根据权利要求8所述的车门安装方法,其特征在于,还包括校核装置,所述校核装置用于校核抓手装置抓住车门的位置;还包括步骤:机器手带动抓手装置抓取车门后,将车门移动到校核装置进行抓取位置校核。
10.根据权利要求8所述的车门安装方法,其特征在于,还包括第三视觉装置,所述第三视觉装置用于识别车门和车架的类型;还包括步骤:第一视觉装置识别车架和车门的相对位置前,第三视觉装置识别车架和车门的类型,判断车门和车架是否同类型。
技术总结
本申请属于汽车生产技术领域,提供一种车门安装设备及其安装方法,车门安装设备第一运载装置、第二运载装置、抓手装置、机器手、装载装置、第一视觉装置和第二视觉装置,所述第一运载装置用于运载车架;所述第二运载装置用于运载车门;所述抓手装置用于抓取车门;所述机器手与所述抓手装置连接,用于带动所述抓手装置;所述装载装置用于将车门装载到所述车架;所述第一视觉装置用于识别车架和车门的相对位置;所述第二视觉装置用于识别车架和车门的装载位置。本申请可保证定位精度,操作方便,大大降低人工成本。
技术研发人员:李勇,屠文聪,王宏宽,崔伟,陈传好
受保护的技术使用者:中国电器科学研究院股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!