冗余助力转向系统的控制方法、装置、设备及存储介质与流程
本技术涉及汽车转向,特别涉及一种冗余助力转向系统的控制方法、装置、设备及存储介质。
背景技术:
1、电助力转向系统作为汽车重要部件之一,承担着响应驾驶需求和保持车辆稳定行驶的作用,随着l3级以上自动驾驶技术的发展,对于电助力转向系统提出了更高的安全要求,故往往采用两套电助力转向系统作为冗余备份,以提高转向助力的安全性和可靠性。
2、目前已知的冗余方案在驱动电机选取时有两种策略:一种方案是选取两个完全相同的大电机,单电机工作即可100%满足系统需求助力扭矩,且正常工作时只有一个驱动电机工作,但该方案系统体积较大,成本高,整车布置安装难度大;另外一种方案是选取两个完全相同的小电机,单电机工作时最大只能满足系统需求助力扭矩的50%,需要两个驱动电机同时工作,平均分配系统所需助力扭矩,该方案容易导致电机实际响应扭矩无法达到系统所需助力扭矩,且电机驱动效率较低,热性能较差。
技术实现思路
1、为了解决上述电机系统的驱动效率较低、热性能较差、系统体积较大和整车布置安装难度大的技术问题,本技术实施例提供了一种冗余助力转向系统的控制方法、装置、设备及存储介质的技术方案,具体的,本技术首先确定车辆的需求助力扭矩,以及确定第一驱动电机对应的第一助力扭矩信息与第二驱动电机对应的第二助力扭矩信息,以便根据确定的需求助力扭矩、第一助力扭矩信息和第二助力扭矩信息,分别控制第一驱动电机和第二驱动电机输出相对应的目标助力扭矩,利用本技术提供的技术方案可以使得冗余助力转向系统中的冗余电机能够同时提供稳定可控的目标助力扭矩,以实现冗余电机工作状态的均衡,进而可提高冗余助力转向系统的驱动效率和安全性。
2、一方面,本技术实施例提供了一种冗余助力转向系统的控制方法,应用于第一控制器,所述第一控制器属于所述冗余助力转向系统,所述冗余助力转向系统还包括第一供电电源、第二供电电源、第一驱动电机、第二驱动电机和第二控制器,所述第一控制器用于控制所述第一驱动电机和所述第二驱动电机输出相对应的助力扭矩,所述第二控制器用于在所述第一控制器出现故障的情况下,控制所述第一驱动电机和所述第二驱动电机输出相对应的助力扭矩,所述第一供电电源用于对所述第一控制器和所述第一驱动电机供电,所述第二供电电源用于对所述第二控制器和所述第二驱动电机供电,上述方法包括:
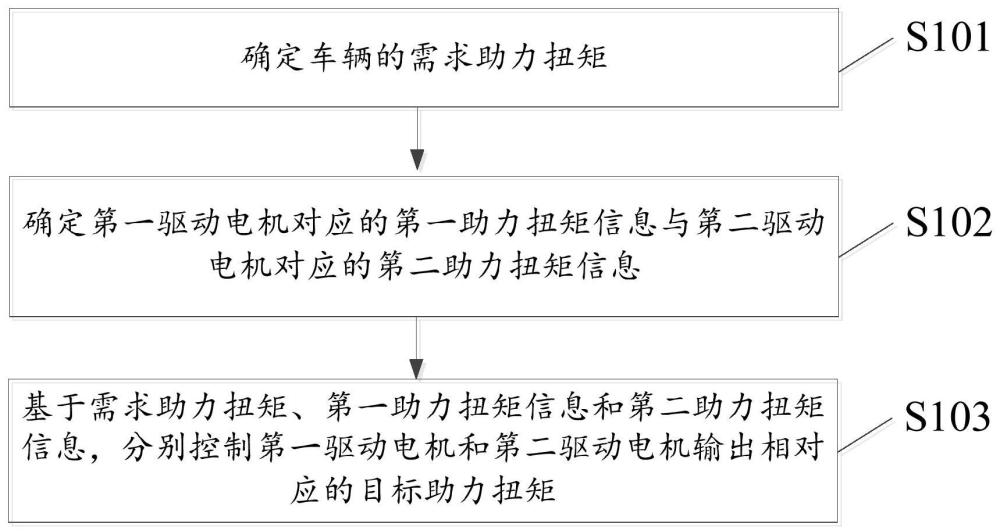
3、确定车辆的需求助力扭矩;
4、确定所述第一驱动电机对应的第一助力扭矩信息与所述第二驱动电机对应的第二助力扭矩信息;
5、基于所述需求助力扭矩、所述第一助力扭矩信息和所述第二助力扭矩信息,分别控制所述第一驱动电机和所述第二驱动电机输出相对应的目标助力扭矩。
6、进一步地,所述确定所述第一驱动电机对应的第一助力扭矩信息与所述第二驱动电机对应的第二助力扭矩信息,包括:
7、获取所述第一驱动电机对应的第一温度信息和第一供电电压信息,获取所述第二驱动电机对应的第二温度信息和第二供电电压信息;
8、基于所述第一温度信息和所述第一供电电压信息,确定所述第一助力扭矩信息;
9、基于所述第二温度信息和所述第二供电电压信息,确定所述第二助力扭矩信息。
10、进一步地,所述基于所述需求助力扭矩、所述第一助力扭矩信息和所述第二助力扭矩信息,分别控制所述第一驱动电机和所述第二驱动电机输出相对应的目标助力扭矩,包括:
11、基于所述第一助力扭矩信息对应的第一助力扭矩与所述第二助力扭矩信息对应的第二助力扭矩,确定所述第一助力扭矩与所述第二助力扭矩中的最小助力扭矩;
12、在预设倍数的所述需求助力扭矩小于等于所述最小助力扭矩的情况下,控制所述第一驱动电机按照预设倍数的所述需求助力扭矩输出,控制所述第二驱动电机按照预设倍数的所述需求助力扭矩输出;
13、在预设倍数的所述需求助力扭矩大于所述最小助力扭矩的情况下,控制能够输出最小助力扭矩的驱动电机按照所述最小助力扭矩进行输出,控制另外一个驱动电机按照所述需求助力扭矩与所述最小助力扭矩的差值进行输出。
14、进一步地,所述方法还包括:
15、在所述需求助力扭矩大于所述第一助力扭矩与所述第二助力扭矩之和的情况下,控制所述第一驱动电机按照所述第一助力扭输出,控制所述第二驱动电机按照所述第二助力扭矩输出。
16、进一步地,所述方法还包括:
17、获取所述第一驱动电机当前输出的第三目标助力扭矩,获取所述第二驱动电机当前输出的第四目标助力扭矩;
18、基于所述第三目标助力扭矩和第一目标助力扭矩,确定所述第一驱动电机在预设时间内输出的第一扭矩增量,所述第一目标助力扭矩为需要控制所述第一驱动电机输出的目标助力扭矩;
19、以所述第一扭矩增量,控制所述第一驱动电机的输出从所述第三目标助力扭矩开始逐步增加或减少至所述第一目标助力扭矩;
20、基于所述第四目标助力扭矩和第二目标助力扭矩,确定所述第二驱动电机在预设时间内输出的第二扭矩增量,所述第二目标助力扭矩为需要控制所述第二驱动电机输出的目标助力扭矩;
21、以所述第二扭矩增量,控制所述第二驱动电机的输出从所述第四目标助力扭矩开始逐步增加或减少至所述第二目标助力扭矩。
22、进一步地,所述确定车辆的需求助力扭矩,包括:
23、获取方向盘力矩信息、方向盘转角信息和所述车辆的速度信息;
24、基于所述方向盘力矩信息、所述方向盘转角信息和所述速度信息,确定所述需求助力扭矩。
25、进一步地,所述方法还包括:
26、监控所述第一控制器的控制状态;
27、在监控到所述第一控制器的控制状态指示控制异常的情况下,启动第二控制器基于所述需求助力扭矩、所述第一助力扭矩信息和所述第二助力扭矩信息,分别控制所述第一驱动电机和所述第二驱动电机输出相对应的目标助力扭矩,所述第二控制器为所述第一控制器的冗余控制器。
28、另一方面,本技术实施例提供了一种冗余助力转向系统的控制装置,应用于第一控制器,所述第一控制器属于所述冗余助力转向系统,所述冗余助力转向系统还包括第一供电电源、第二供电电源、第一驱动电机、第二驱动电机和第二控制器,所述第一控制器用于控制所述第一驱动电机和所述第二驱动电机输出相对应的助力扭矩,所述第二控制器用于在所述第一控制器出现故障的情况下,控制所述第一驱动电机和所述第二驱动电机输出相对应的助力扭矩,所述第一供电电源用于对所述第一控制器和所述第一驱动电机供电,所述第二供电电源用于对所述第二控制器和所述第二驱动电机供电,上述装置包括:
29、需求助力扭矩确定模块,用于确定车辆的需求助力扭矩;
30、助力扭矩信息确定模块,用于确定所述第一驱动电机对应的第一助力扭矩信息与所述第二驱动电机对应的第二助力扭矩信息;
31、驱动电机控制模块,用于基于所述需求助力扭矩、所述第一助力扭矩信息和所述第二助力扭矩信息,分别控制所述第一驱动电机和所述第二驱动电机输出相对应的目标助力扭矩。
32、另一方面提供了一种冗余助力转向系统的控制设备,所述冗余助力转向系统的控制设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现如上述的冗余助力转向系统的控制方法。
33、另一方面提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现如上述的冗余助力转向系统的控制方法。
34、实施本技术,具有如下有益效果:
35、本技术首先确定车辆的需求助力扭矩,以及确定第一驱动电机对应的第一助力扭矩信息与第二驱动电机对应的第二助力扭矩信息,以便根据确定的需求助力扭矩、第一助力扭矩信息和第二助力扭矩信息,分别控制第一驱动电机和第二驱动电机输出相对应的目标助力扭矩,利用本技术提供的技术方案可以使得冗余助力转向系统中的冗余电机能够同时提供稳定可控的目标助力扭矩,以实现冗余电机工作状态的均衡,进而可提高冗余助力转向系统的驱动效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!