一种位移检测装置、系统和方法与流程
本申请涉及线控转向控制,尤其涉及一种位移检测装置、系统和方法。
背景技术:
1、在线控转向系统中,驾驶员的操纵动作通过传感器变成电信号,信号经分析处理后,通过导线直接传递到执行机构。执行机构中,滚珠丝杆位移需要通过齿轮将滚珠丝杆横向位移转化为轴向旋转来检测,这样存在以下问题:
2、1)需要在系统上增加一套位置检测的机械结构,增加成本;2)轴向检测的位置信息受到了多种因素的影响,如滚珠丝杆螺纹与啮合齿轮间隙产生的误差,造成当前转向位置信息偏差,亦或是电角度传感器退磁产生的信号误差等都直接影响了转向位置信息,继而影响了驱动准确性和精度;3)随着社会发展,汽车的高性能和安全的需求也逐步增加,要求转向系统位移检测机构的量程大、精度高、节省汽车空间和冗余控制等,目前的转向系统无法满足这些要求。
3、有鉴于此,特提出本申请。
技术实现思路
1、本申请的一个目的是提供一种位移检测装置、系统和方法,通过长度不同的感应线圈实现不同精度和量程的位移检测,机械结构简单,且同时满足了量程和精度的要求。
2、为实现上述目的,本申请的一些实施例提供了以下几个方面:
3、第一方面,本申请提供了一种位移检测装置,包括:
4、设置于线控转向系统的滚珠丝杆上的感应块;
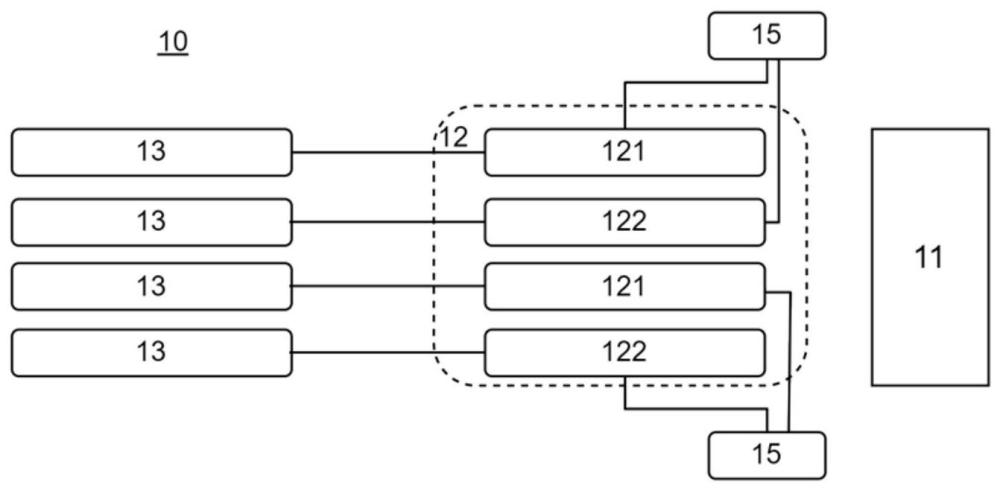
5、距离所述感应块设定范围内的多个感应线圈,所述多个感应线圈的长度不完全相同;
6、与每个所述感应线圈分别电性连接的传感器芯片;
7、所述感应块在滚珠丝杠的带动下沿所述滚珠丝杠轴向运动,所述多个感应线圈将检测到的电信号传输到对应的传感器芯片,所述传感器芯片将电信号转换为位移信号;其中,较长感应线圈检测的位移信号的精度高于较短感应线圈检测的位移信号的精度,较长感应线圈检测的位移信号的量程大于较短感应线圈检测的位移信号的量程。
8、可选的,所述多个感应线圈包括至少两个第一感应线圈和至少两个第二感应线圈;
9、所述第一感应线圈的长度大于所述第二感应线圈;
10、所述多个感应线圈叠放在所述感应块的设定范围内。
11、可选的,多个感应线圈叠放在多层电路板上,呈中心对称分布;
12、所述感应块与所述多个感应线圈呈轴对称。
13、可选的,至少两个第一感应线圈互为冗余,至少两个第二感应线圈互为冗余;
14、一个第一感应线圈与一个第二感应线圈为一个线圈组,由一个电源供电;
15、不同线圈组的供电电源不同。
16、第二方面,本申请提供了一种位移检测方法,适用于任一实施例提供的位移检测装置,所述方法包括:
17、采集多个感应线圈检测的位移信号;
18、选取对应精度和量程的位移信号进行处理,生成位移矢量信号;所述位移矢量信号用于车辆转向控制。
19、可选的,所述根据当前车轮转角选取对应精度和量程的位移信号进行处理,包括:
20、如果当前车轮转角大于设定阈值,选取低精度和大量程的位移信号进行处理;
21、如果当前车轮转角小于等于设定阈值,选取高精度和小量程的位移信号进行处理。
22、可选的,在确定车辆转动方向或者估算转向角度时选取所述低精度和大量程的位移信号;
23、在精确计算转向角度时选取所述高精度和小量程的位移信号。
24、可选的,所述当前车轮转角通过轮角度传感器或者方向盘转角传感器获取。
25、可选的,在根据当前车轮转角选取对应精度和量程的位移信号进行处理之前,所述方法还包括:
26、如果位移信号没有采集到或者超过设定量程,判定所述感应线圈故障;
27、如果故障,切换为正常的感应线圈,所述正常的感应线圈包括与所述故障的感应线圈属于同一组的线圈或者与所述故障的感应线圈属于不同组的至少一个感应线圈。
28、第三方面,本申请的一些实施例还提供了一种位移检测系统,包括:任一实施例提供的位移检测装置;
29、与所述位移检测装置连接的控制器,所述控制器用于执行任一实施例所述的位移检测方法。
30、相较于现有技术,本申请采用感应线圈的直线式检测方式,其结构上有别于市面上的旋转式,在空间上省去了传统线控转向系统中的位置检测机械,本申请结构结构简单,节省车内空间;本申请通过长度不同的感应线圈实现不同精度和量程的位移检测,从而长度不同的线圈配合可以同时满足大量程和高精度的要求。
31、进一步的,本申请至少两个第一感应线圈互为冗余,至少两个第二感应线圈互为冗余,且分别由不同的独立电源供电,可以在一个感应线圈故障时切换到另一个线圈组,不对汽车控制造成太大的影响,大大增加了驾驶的安全性。
技术特征:
1.一种位移检测装置,其特征在于,包括:
2.根据权利要求1所述的位移检测装置,其特征在于,所述多个感应线圈包括至少两个第一感应线圈和至少两个第二感应线圈;
3.根据权利要求2所述的位移检测装置,其特征在于,多个感应线圈叠放在多层电路板上,呈中心对称分布;
4.根据权利要求1所述的位移检测装置,其特征在于,至少两个第一感应线圈互为冗余,至少两个第二感应线圈互为冗余;
5.一种位移检测方法,其特征在于,适用于权利要求1~4任一项所述的位移检测装置,所述方法包括:
6.根据权利要求5所述的位移检测方法,其特征在于,所述选取对应精度和量程的位移信号进行处理,包括:
7.根据权利要求5所述的位移检测方法,其特征在于,所述选取对应精度和量程的位移信号进行处理,包括:
8.根据权利要求6所述的位移检测方法,其特征在于,所述当前车轮转角通过轮角度传感器或者方向盘转角传感器获取。
9.根据权利要求5所述的位移检测系统,其特征在于,在根据当前车轮转角选取对应精度和量程的位移信号进行处理之前,所述方法还包括:
10.一种位移检测系统,其特征在于,包括:权利要求1~4任一项所述的位移检测装置;
技术总结
本申请提供了一种位移检测装置、系统和方法,涉及线控转向控制技术领域,位移检测装置包括设置于线控转向系统的滚珠丝杆上的感应块;距离感应块设定范围内的多个感应线圈,感应块在滚珠丝杠的带动下沿所述滚珠丝杠轴向运动,多个感应线圈将检测到的电信号传输到对应的传感器芯片,传感器芯片将电信号转换为位移信号;通过长度不同的感应线圈实现不同精度和量程的位移检测,从而长度不同的线圈配合可以同时满足大量程和高精度的要求。
技术研发人员:潘光亮,舒强,章海杰,高华,徐诚,王存强
受保护的技术使用者:上海同驭汽车科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!