一种底盘可重构四摆臂轮履机器人
本发明涉及一种底盘可重构四摆臂轮履机器人,特别涉及一种可以在非结构化环境下工作的底盘可重构式双履带加四摆臂轮式驱动机器人。
背景技术:
1、自21世纪以来,轮履底盘机器人在全球范围内引起了广泛关注和重视。被普遍视为未来新兴产业发展中的重要高科技领域之一。各国纷纷制定和推进相关研究计划,例如欧盟的“认知系统与机器人技术”计划、美国的“美国国家机器人计划”,以及日本和韩国在服务型机器人领域的相应研究计划。我国明确将移动机器人技术,特别是轮履底盘机器人技术作为国家高新技术研究发展计划、国家自然科学基金、国家科技重大专项等战略规划中的重点研发领域之一。救援机器人具备在危险环境中工作的能力,可以代替或辅助人类进行搜救、侦察、救援和清理等任务,旨在提高救援行动的效率和安全性,减少人员伤亡风险,并提供更及时和准确的情报和支持。irobot的packbot系列是美国公司研发的一种轻型机器人,主要用于爆炸物处理和搜救任务,其履带前角可调,可以提高其攀爬能力。天津理工大学开发的轮履复合机器人具有独特的特点,机器人的履带几何长度是可变的。它由两个可变形的履带大轮作为驱动轮,并有两个前面的被动小轮起支撑作用,具备卓越的爬坡、越沟、越障和上下楼梯能力,同时具备稳定的运动性能。
2、目前底盘可重构四摆臂轮履机器人的研究中,一种履带式摆臂机器人(cn202211139250.4)由车体以及四个摆臂组成,车体的两侧以及每一个所述摆臂上均转动设有履带,但该结构只有一种行驶模式,运动灵活度低。并且,由于机器人的底盘结构简单,不可重构,无法改变运动过程中的重心位置变化,运动稳定性不易控制。一种可变形的履带底盘(cn202310652758.2)是基于双驱动电机和双舵机控制,包括前履带组、后履带组、变形离合、车架四个部分,可以根据不同地形改变底盘形状,但由于该发明中缺少底盘长度变化对履带长度调节的结构,缓冲性能不稳定,履带容易磨损。
3、并且,上述两篇现有技术中的机器人均未考虑机器人行驶模式的变化,底盘重心不能随运动状态产生动态变化。同时,上述两篇现有技术中的机器人均采用履带行驶模式,不适用于复杂多变的救援环境。
4、目前救援机器人大多为固定底盘机器人,为了适用于恶劣环境,驱动形式大多采用履带式。底盘可重构四摆臂轮履移动机器人,实现了履带驱动与轮式驱动结合的驱动方式。在保证稳定性的前提下提高了轮履机器人的越障能力,并同时具有轮式机器人的高灵活性及高移速等优点。机器人具有两条履带和两组左右并联的摆臂系统,并具有一个受履带总长约束的可变长度的底盘,通过底盘长度的变化可改变机器人的高度及质心位置,调整灵活性与越障性能的平衡。相对于现有的救援机器人,底盘可重构四摆臂轮履移动机器人具有越障能力强,灵活性强,可靠性高的优点。
技术实现思路
1、本发明的目的在于改善现有救援机器人的弊端,同时解决非结构化环境下底盘越障的问题,提出了一种底盘可重构四摆臂轮履移动机器人。
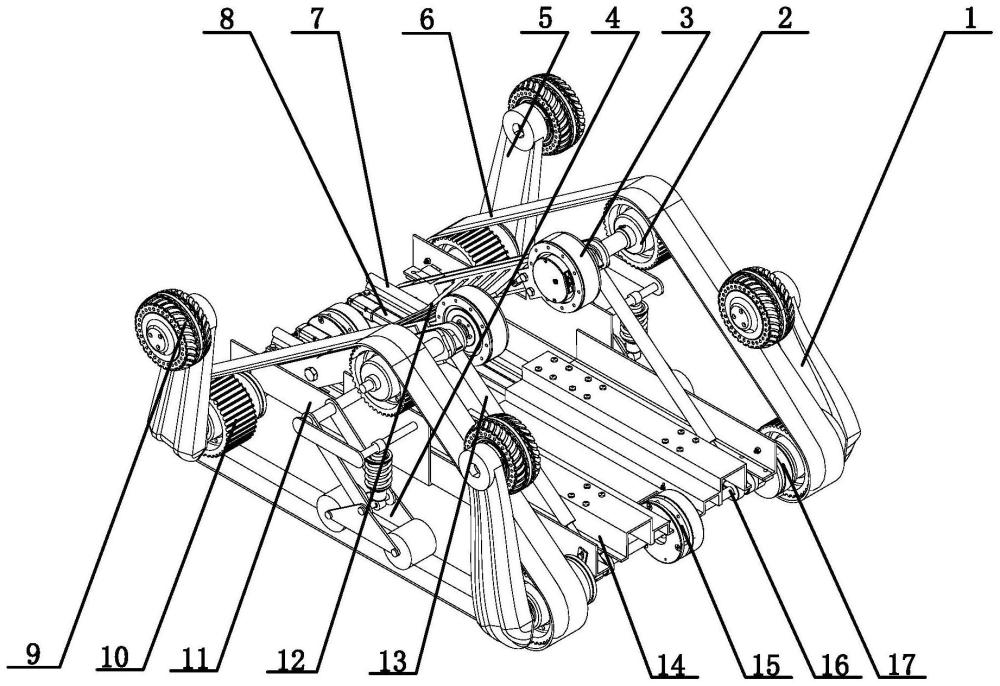
2、本发明提出了一种底盘可重构四摆臂轮履机器人,包括前摆臂(1)、主动履带轮(2)、高位电机(3)、支重轮总成(4)、后摆臂(5)、履带(6)、直线导轨(7)、电动推杆(8)、驱动轮(9)、从动履带轮(10)、后底盘(11)、机架板(12)、气动弹簧(13)、前底盘(14)、制动器(15)、轮轴(16)、离合器(17)。机器人底盘由前底盘(14)和后底盘(11)组成,前底盘(14)和后底盘(11)通过直线导轨(7)和电动推杆(8)配合,电动推杆(8)伸缩改变底盘长度,底盘缩短,气动弹簧(13)伸长,高位电机(3)位置上升,机器人重心升高,反之则重心降低。控制离合器(17)和制动器(15)可实现机器人轮履驱动模式切换,高位电机(3)驱动主动履带轮(2),带动履带(6)运动,实现履带驱动模式;前摆臂(1)和后摆臂(5)与轮轴(16)连接,履带(6)运动带动从动履带轮(10)转动,操作离合器(17)和制动器(15)可以控制轮轴(16)与从动履带轮(10)连接或断开,轮轴(16)旋转带动摆臂转动,驱动轮(9)着地,实现轮式驱动模式。控制前摆臂(1)和后摆臂(5)的转动角度可以改变驱动轮(9)的轮距和机器人的重心位置,后摆臂(5)的驱动轮(9)安装于摆臂(5)的外侧,前摆臂(1)的驱动轮(9)安装于摆臂(1)的内侧,前摆臂(1)回收,前摆臂(1)驱动轮(9)与履带(6)接触并压紧履带(6),实现辅助驱动。机架板(12)与气动弹簧(13)、后底盘(11)连接,并受到履带(6)的长度约束,气动弹簧(13)和支重轮总成(4)可起到避震作用。在轮式驱动和履带驱动模式下,驱动轮(9)和履带(6)的布局处于机器人最外围,机器人发生倾覆后,可控制驱动轮(9)和履带(6)继续移动。底盘长度的变化与摆臂角度的变化可以单独控制,两者以不同的组合形式配合,可以平衡轮履机器人的越障性能和灵活性能。
3、机器人有履带驱动和轮式驱动两种模式,控制离合器(17)和制动器(15)可实现机器人轮履行驶模式切换。高位电机(3)驱动主动履带轮(2)转动,带动从动履带轮(10)转动,履带(6)受到拉力,推动机器人前进或转向,实现履带驱动形式。机器人的前摆臂(1)和后摆臂(5)与轮轴(16)连接,履带(6)运动带动从动履带轮(10)转动,离合器(17)闭合,制动器(15)不制动,轮轴(16)与从动履带轮(10)接合,从动履带轮(10)带动轮轴(16)转动,进而带动前摆臂(1)和后摆臂(5)转动,摆臂转动至驱动轮(9)着地,支撑起机器人的机身,制动器(15)制动,离合器(17)断开,从动履带轮(10)与轮轴(16)断开连接,轮轴(15)停止转动,摆臂的位置固定,利用四个摆臂的驱动轮(9)驱动机器人运动,实现轮式驱动模式。
4、机器人的底盘包括后底盘(11)和前底盘(14),后底盘(11)与前底盘(14)由直线导轨(7)和电动推杆(8)连接,前底盘(14)有四个凹槽,分别是两个导轨滑块槽及两个电动推杆(8)槽,导轨滑块共有两排,每排共三个,固定在前底盘(14)下端的凹槽中,电动推杆(8)和直线导轨(7)安装在后底盘(11)上。机架板(12)与后底盘(11)通过轴承连接,可调整角度,气动弹簧(13)与后底盘(11)、前底盘(14)及机架板(12)铰接。
5、电动推杆(8)与直线导轨(7)配合联接,气动弹簧(13)恒受压力,在保持履带(6)的张紧力的条件下,可以改变机器人的重心位置。电动推杆(8)伸缩改变前底盘(14)与后底盘(11)的相对位置,电动推杆(8)缩短,底盘长度减小,气动弹簧(13)伸长,高位电机(3)位置上升,机器人整体高度增大,重心位置升高,电动推杆(8)最短时,底盘长度最短,机器人为高重心行驶模式;电动推杆(8)伸长,底盘长度增大,气动弹簧(13)收缩,高位电机(3)位置下降,机器人整体高度减小,重心位置降低,电动推杆(8)最长,机器人底盘长度最长,机器人为低重心行驶模式。
6、履带系统由主动履带轮(2)、从动履带轮(10)、支重轮总成(4)和履带(6)组成。机器人有左右两个履带系统,主动履带轮(2)与高位电机(3)相连,固定在机架板(12)上端,从动履带轮(10)分别固定于前后轴的两端,支重轮总成(4)固定在后底盘(11)两侧的翼板轴上。机器人行进时,高位电机(3)驱动主动履带轮(2)转动,带动从动履带轮(10)转动,履带(6)受到拉力,推动机器人前进或转向。由于履带底盘的长度可以改变,遇到凹凸不平的地面时,履带(6)接地平面会产生变形,支重轮总成(4)可以减小履带(6)变形,减震器(4-3)与连接板(4-2)上端与后底盘(11)铰接,下端与支重轮板(4-4)形成复合转动副,使支重轮(4-1)可绕轴小幅旋转并可小幅纵向位移。
7、摆臂总成由离合器(17)、制动器(15)、前摆臂(1)、后摆臂(5)、驱动轮(9)、轮轴(16)组成。机器人有四个摆臂,左右摆臂与轮轴(16)连接,从动履带轮(10)空套在轮轴(16)上,离合器(17)可以控制从动履带轮(10)与轮轴(16)连接或断开,制动器(15)安装在轮轴(16)上,控制轮轴(16)转动,轮轴(15)带动摆臂转动可以改变机器人的重心位置和摆臂的驱动轮(9)的轮距。
8、前摆臂(1)的驱动轮(9)安装于前摆臂(1)的内侧,后摆臂(5)的驱动轮(9)安装于后摆臂(5)的外侧。机器人使用履带驱动动力不足时,前摆臂(1)回收,驱动轮(9)与履带(6)外侧接触并对履带(6)施加张紧力,驱动轮(9)转动实现辅助驱动。
9、支重轮总成(4)由支重轮(4-1)、连接板(4-2)、减震器(4-3)和支重轮板(4-4)组成,支重轮总成(4)的减震器(4-3)上端与后底盘(11)铰接,下端与支重轮板(4-4)形成复合转动副,使支重轮(4-1)可绕轴小幅旋转并可小幅纵向位移。气动弹簧(13)恒受压力,当电动推杆(8)缩短时,气动弹簧(13)伸长保持涨紧,从而保证了履带(6)始终处于绷紧状态。在履带驱动行驶过程中,气动弹簧(13)与从动履带轮(10)铰接。在从动履带轮(10)接触地面障碍时,气动弹簧(13)和减震器(4-3)可起到避震作用。
10、驱动轮(9)安装在机器人摆臂上,履带(6)呈三角形安装在机器人机身的两侧,沿着机器人的周边环绕布置,驱动轮(9)和履带(6)的布局处于机器人最外围,机器人发生倾覆后,可控制驱动轮(9)和履带(6)继续移动。
11、本发明与现有技术相比,其有益效果具体如下:
12、(1)本发明中底盘可重构四摆臂轮履机器人采用可变长度的底盘结构,当需要更高的越障性能时,底盘长度伸长,重心变低,可跨越更大的沟壑等障碍;当需要更强的灵活性时,底盘长度缩短,提供更小的转弯半径。
13、(2)本发明中采用履带底盘长度的变化与摆臂角度的变化可单独控制,所以两者可进行形式上的组合通过不同的组合形式,可以在强越障性能与强灵活性能间平衡调整。
14、(3)本发明中底盘可重构四摆臂轮履机器人的驱动方式有两种,履带驱动和轮式驱动。履带驱动可以帮助机器人克服崎岖的地形和高障碍物,轮式驱动是由四个驱动轮驱动,能够提供较高的行驶速度。驱动轮和履带的布局处于机器人最外围,机器人发生倾覆后,可控制驱动轮和履带继续移动。
15、(4)本发明中选用轮式结构的四摆臂。当机器人处于平地或坡度较缓的斜坡时,可通过摆臂支撑机器人机身,提供更快的移动速度。
16、(5)本发明中采用电动推杆与气动弹簧在维持履带的张紧力的条件下,改变机器人重心位置,提高运动稳定性和灵活性。同时,气动弹簧和支重轮总成可作为悬架起到避震作用,保证机器人车身传感器正常工作。
17、(6)本发明中底盘可重构四摆臂轮履机器人的驱动轮轮距可变,前摆臂驱动轮安装于摆臂内侧,后摆臂驱动轮安装于摆臂外侧,通过控制前摆臂的驱动轮转动可助力两条履带进行越障,增强机器人底盘的越障能力。
- 还没有人留言评论。精彩留言会获得点赞!