一种陆地滑行足式作业机器人
本技术属于机器人领域,尤其是一种陆地滑行足式作业机器人。
背景技术:
1、工业机器人越来越多地被应用于各种场景,以代替人类从事危险活动或帮助人类取得必要的设施信息。作业机器人按照移动方式有足式、轮式、履带式三种,这些机器人可代替人类完成隧道、通风管道、高空建物顶部、灾后等危险环境的勘察,可代替人类在高空、救援及存在污染的情况下作业。现有的机器人主要以足式及履带式为主,在规则地形的情况下它们具有相对足式机器人更快的移动速度,但在不规则地形上或环境不可预测时,它们的移动受到极大限制,他们的作用也因此十分有限。在对通风管道、排污管道、桥梁隧道、高空建物等不便于人进出或较为危险的环境进行检测时,使用体积小巧的机器人无疑能够规避很多检测时的风险。但当通风管道连接处存在阻碍、排水管道存在累积的垃圾、桥梁隧道地形不再平整、高空建物顶端存在裂隙,这些都会阻碍轮式及履带式机器人的移动,而足式机器人的移动则不受影响。虽然足式机器人对于环境的适应性较强,然而足式机器人的移动速度在规则地形上又远不如轮式或履带式机器人,因此,亟需一种能够适应各种不同地形环境、且能够有较高移动速度的机器人。
2、中国实用新型专利cn210437288u公开了一种轮足机器人,该轮足机器人同时具有足式爬行机构和轮式爬行机构,能够使得机器人在规则地形及不规则地形上行走。该机器人主体采用正方形结构,四足位于四角,四轮位于四边,当机器人处于规则地形时可通过全向轮实现快速移动。但是该全向移动结构极大地增加了结构复杂度,且灵活性有所欠缺。
3、中国实用新型专利cn208325462u公开了一种轮足机器人,该机器人底盘采用轮式足式复合结构,通过轮式和足式的相互补充,能够满足多种运用场景。但是,该机器人的足式结构也对机器人的越障能力做了限制。当机器人足端前方存在窄、小型障碍物时,或障碍物较大时,这种轮足复合机器人可能难以跨越。
技术实现思路
1、本实用新型的目的在于解决现有技术中的问题,提供一种陆地滑行足式作业机器人,采用腹部滑行轮,精简结构,将足式与轮式的优点结合,同时提高承重能力,便于搭载机械操作臂及各类检修设备。
2、为达到上述目的,本实用新型采用以下技术方案予以实现:
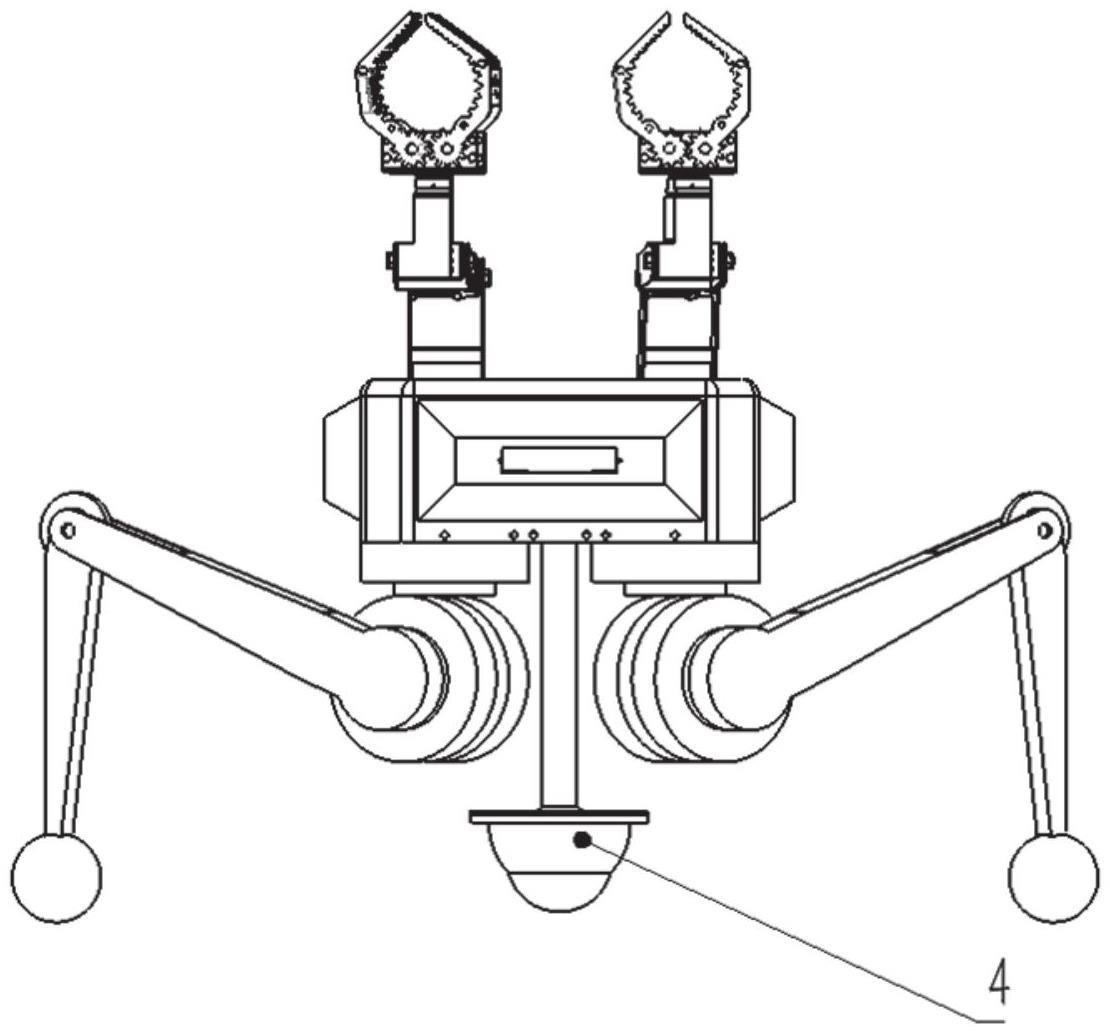
3、一种陆地滑行足式作业机器人,包括机器主体、腿部、机械操作臂和滑行轮;
4、所述机器主体的两侧对称安装有若干腿部,所述机器主体的顶部安装有机械操作臂,所述滑行轮安装在机器主体的底部。
5、进一步的,所述机器主体上设置有机器外壳和机器连接板,所述机器外壳通过螺丝固定在机器连接板上。
6、进一步的,所述机器外壳包括外壳主体和后盖,所述外壳主体上设置有深度相机,所述后盖为可拆卸安装,所述后盖上设置有若干散热风扇。
7、进一步的,所述腿部通过电机安装在机器主体上。
8、进一步的,所述机械操作臂包括大臂、小臂和执行器,所述大臂的一端通过第一舵机活动连接机器主体,所述大臂的另一端通过第二舵机活动连接小臂的一端,所述小臂的另一端活动连接执行器。
9、进一步的,所述执行器包括第一支架组、第二支架组和夹手,所述第一支架组的一端连接小臂,所述第一支架组的另一端连接第二支架组的一端,所述第二支架组的另一端连接夹手。
10、进一步的,所述第一支架组中的第三舵机活动连接小臂,所述第三舵机与第一支架通过螺钉连接,所述第一支架通过螺柱组连接第五舵机。
11、进一步的,所述第二支架组中的第二支架连接第五舵机,所述第二支架通过螺栓组连接第四舵机,所述第四舵机通过螺栓连接夹手。
12、进一步的,所述滑行轮包括压片、连杆、轮槽和轮子,所述连杆的一端开设有螺纹孔,所述压片设置在连杆与机器连接板之间,所述机器连接板上的螺栓穿过压片固定在螺纹孔内,所述连杆的另一端通过螺钉连接轮槽,所述轮子半包在轮槽内。
13、与现有技术相比,本实用新型具有以下有益效果:
14、本实用新型提供一种陆地滑行足式作业机器人,在机器人的腹部设置滑行轮,精简结构,将足式与轮式的优点结合,当机器人使用于规则地形时,采用腹部滑行轮辅助足端进行各个方向的移动,极大提升机器人规则地形移动速度,同时增加了机器人运动灵活性。当机器人使用于不规则地形时,采用多自由度腿部继续行走,通过改变抬腿高度跨越不同的障碍物,适应不同不规则地形,同时腿部结构能够使得机器人有更强的承重能力,并且搭载用于作业的机械操作臂,两者结合使得机器人能够适应各种地形及工作环境。本实用新型的陆地滑行足式作业机器人能够良好适应各种不同的环境,增强了机器人的平衡能力及不规则地形上的适应能力,便于搭载机械操作臂及各类检修设备。且在规则环境中能够有较快的移动速度,提高了规则地形上机器人的移动能力,能够高效执行检测及信息收集任务,且其搭载的机械操作臂能够对检测出来的故障存在区域进行修复、采样等工作。
15、进一步的,机器人腿部关节运动的驱动电机为大扭矩电机,使机器人能够拥有较大的承受负载的能力,从而能够搭载一定重量的检测装备执行作业。
16、进一步的,机器人身前设置的机械操作臂,采用舵机进行驱动,减小了机械操作臂整体重量,避免机器人整机重心过于前移,其末端的夹手可以辅助检测、修复任务的执行,提高作业的精细化程度及准确程度。
技术特征:
1.一种陆地滑行足式作业机器人,其特征在于,包括机器主体(1)、腿部(2)、机械操作臂(3)和滑行轮(4);
2.根据权利要求1所述的一种陆地滑行足式作业机器人,其特征在于,所述机器主体(1)上设置有机器外壳(5)和机器连接板(6),所述机器外壳(5)通过螺丝固定在机器连接板(6)上。
3.根据权利要求2所述的一种陆地滑行足式作业机器人,其特征在于,所述机器外壳(5)包括外壳主体(7)和后盖(9),所述外壳主体(7)上设置有深度相机(8),所述后盖(9)为可拆卸安装,所述后盖(9)上设置有若干散热风扇(10)。
4.根据权利要求1所述的一种陆地滑行足式作业机器人,其特征在于,所述腿部(2)通过电机安装在机器主体(1)上。
5.根据权利要求1所述的一种陆地滑行足式作业机器人,其特征在于,所述机械操作臂(3)包括大臂(16)、小臂(18)和执行器(19),所述大臂(16)的一端通过第一舵机(15)活动连接机器主体(1),所述大臂(16)的另一端通过第二舵机(17)活动连接小臂(18)的一端,所述小臂(18)的另一端活动连接执行器(19)。
6.根据权利要求5所述的一种陆地滑行足式作业机器人,其特征在于,所述执行器(19)包括第一支架组、第二支架组和夹手(22),所述第一支架组的一端连接小臂(18),所述第一支架组的另一端连接第二支架组的一端,所述第二支架组的另一端连接夹手(22)。
7.根据权利要求6所述的一种陆地滑行足式作业机器人,其特征在于,所述第一支架组中的第三舵机(21)活动连接小臂(18),所述第三舵机(21)与第一支架(20)通过螺钉连接,所述第一支架(20)通过螺柱组(27)连接第五舵机(26)。
8.根据权利要求6所述的一种陆地滑行足式作业机器人,其特征在于,所述第二支架组中的第二支架(25)连接第五舵机(26),所述第二支架(25)通过螺栓组(24)连接第四舵机(23),所述第四舵机(23)通过螺栓连接夹手(22)。
技术总结
本技术公开了一种陆地滑行足式作业机器人,包括机器主体、腿部、机械操作臂和滑行轮;所述机器主体的两侧对称安装有若干腿部,所述机器主体的顶部安装有机械操作臂,所述滑行轮安装在机器主体的底部。本技术的陆地滑行足式作业机器人能够良好适应各种不同的环境,增强了机器人的平衡能力及不规则地形上的适应能力,便于搭载机械操作臂及各类检修设备。且在规则环境中能够有较快的移动速度,提高了规则地形上机器人的移动能力,能够高效执行检测及信息收集任务,且其搭载的机械操作臂能够对检测出来的故障存在区域进行修复、采样等工作。
技术研发人员:周亚婷,朱雅光,段晨阳,闫鹏飞,魏浩宇
受保护的技术使用者:长安大学
技术研发日:20230413
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!