一种触地反馈的六足机器人足式结构
本发明涉及机器人,具体涉及一种触地反馈的六足机器人的足式结构。
背景技术:
1、随着人工智能技术的发展,足式机器人以其对地形的高适应性和灵巧性而越来越多的出现在人们的视野中。为提高足式机器人对地形的适应能力,良好的足端反馈必不可少。针对于触地反馈装置,目前的应用于足式机器人上的主流技术有两种:一种是采用测关节力矩的方式来判断足端是否落地,但这种技术需要采用电流/电压检测求力矩的方式来判断是否落地,算法复杂且受温度等因素影响大,采用内置机械扭矩测量的方式价格昂贵。还有一种技术是在足端配置传感器,即在设计中采用了力传感器反馈腿部活动状态。但是这类传感器的价格昂贵,且对安装和使用的要求也较高因此,改进机器人足底的触地感知方式成为了足式机器人机构设计的重要问题。
技术实现思路
1、针对本领域存在的不足之处,本实用新型提供了一种触地反馈的六足步行机器人足式结构,结构简单、成本较低,能使机器人感知到足部是否触地,从而及时进行相应的步态、姿态的调整,以便适应复杂地形,也能起到一定减震缓冲的作用,提升机器人运动的稳定性。
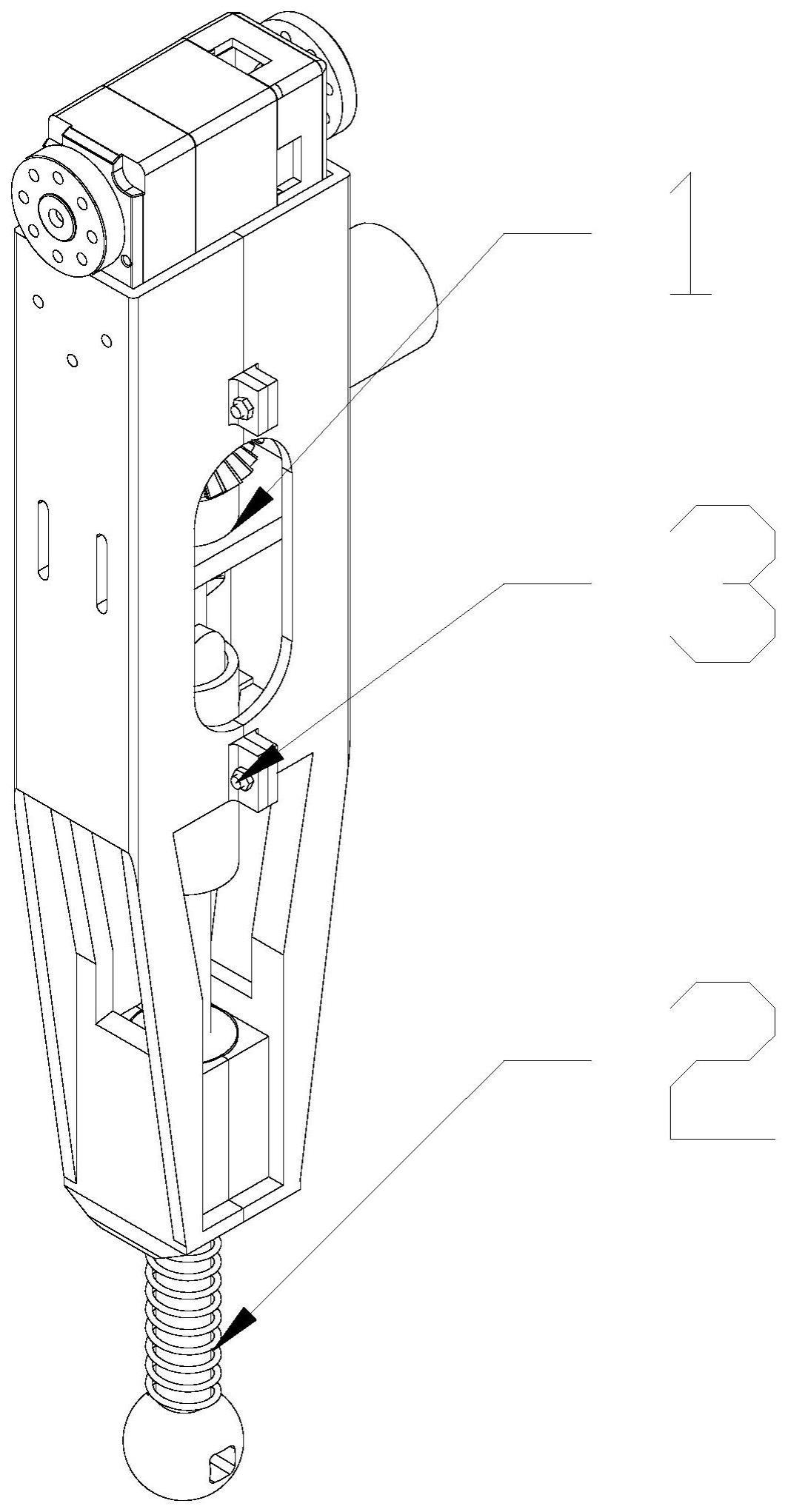
2、本发明解决其技术问题所采用的技术方案是:包括反馈单元、足端单元和固定单元,反馈单元与足端单元相连接,固定单元再将反馈单元和足端单元连接固定。反馈单元主要是利用了编码器、圆柱凸轮和锥齿轮传动进行信息反馈的;足端单元采用了弹簧和橡胶减震器进行了缓冲;固定单元通过左外壳和右外壳,用卡槽和螺钉将反馈单元和足端单元限位固定。
3、作为本发明的一种优选的技术方案,所述的反馈单元由两个相同的锥齿轮、圆柱凸轮固定板、法兰边轴承、圆柱凸轮、圆柱凸轮卡槽套筒、随动器螺母、凸轮随动器和编码器组成的;其中两个相同的锥齿轮垂直配合,处于水平放置状态下的锥齿轮的内径孔与圆柱凸轮固定板的圆孔同轴心配合,且固定板有一定深度的阶梯状槽口,将法兰边轴承嵌入阶梯状槽口中,同时圆柱凸轮的上端通过轴承内孔和锥齿轮内孔同轴心配合,固定在槽口的轴承使得圆柱凸轮在处于竖直状态下能进行旋转运动;圆柱凸轮卡槽套筒与圆柱凸轮同轴心配合,同时凸轮随动器通过套筒上的圆孔和凸轮卡槽相配合,随动器沿着圆柱凸轮的槽口轨迹进行运动,圆柱凸轮卡槽套筒做竖直方向上具有周期性的双向线性运动,同时带动凸轮及与凸轮配合的锥齿轮进行旋转运动,锥齿轮的转动带动与其垂直配合的锥齿轮的转动;锥齿轮和编码器的转轴相配合,锥齿轮带动编码器的转轴转动,从而使编码器接收到反馈信号。
4、作为本发明的一种优选的技术方案,所述的足端单元包括连接杆、弹簧、工程塑料直线轴承和橡胶减震器;连接杆的上端和圆柱凸轮卡槽套筒底部设有的圆柱槽口同心配合,其下端有一定深度的螺纹孔,橡胶减震器上端带有的外螺纹与螺纹孔配合;工程塑料轴承嵌入左外壳和右外壳的组合体的下端的槽口;弹簧与连接杆同轴配合,其上下端在处于原长状态下时分别与固定单元中的外壳结合体底部、橡胶减震器橡胶球的上端面接触。橡胶不仅能增加足部与地面接触的摩擦力,而且在缓冲上也有较大的作用。当六足机器人进行步态运动时,足端受力弹簧压缩,连接杆内收,反馈单元进行沿杆向上的线性运动到旋转运动的转化过程;当六足机器人抬起足端进行下一步态运动时,足端弹簧反弹,予以橡胶减震器沿着杆向下的力,反馈单元进行沿杆向下的线性运动到旋转运动的转化过程。
5、作为本发明的一种优选的技术方案,所述的固定单元包括左外壳、右外壳、螺丝、螺母和舵机;左外壳实体的部分有柱状深槽口,右外壳对应的部分有相同长度的圆柱,两外壳对齐配合,同时两外壳在四个紧固孔的对齐配合情况下,通过螺丝和螺母进行紧固;左外壳和右外壳拼接后的组合体上端有一定深度的凹槽,再将舵机嵌入凹槽。左右外壳上固定圆柱凸轮固定板的孔设置成了可调整位置的长直槽口。
6、作为本发明的一种优选的技术方案,所述的凸轮随动器的另一端是具有一定长度的外螺纹,该外螺纹通过圆柱凸轮卡槽套筒上的圆孔和随动器螺母配合在一起,固定在套筒上。编码器通过右外壳上的通孔将转轴和竖直状态放置下的锥齿轮同轴配合在一起,同时右外壳上对应的螺纹孔和固定编码器上的螺纹孔对齐紧固。
7、本发明的有益效果是:
8、1.本发明所述的一种触地反馈的六足机器人足式结构,其结构简单、成本较低,能使机器人感知到足部是否触地,从而及时进行相应的步态、姿态的调整,以便适应复杂地形,也能起到一定减震缓冲的作用,提升机器人运动的稳定性。
9、2.本发明所属的一种触地反馈的六足机器人足式结构,其传感反馈方式灵敏迅速,相较于力传感器等方式成本更低,控制更加方便。
技术特征:
1.一种触地反馈的六足机器人足式结构,其特征在于:包括反馈单元(1)、足端单元(2)和固定单元(3),反馈单元(1)与足端单元(2)相连接,固定单元(3)再将反馈单元(1)和足端单元(2)连接固定;反馈单元(1)主要是利用了编码器、圆柱凸轮和锥齿轮传动进行信息反馈的;足端单元(2)采用了弹簧和橡胶减震器进行了缓冲;固定单元(3)通过左外壳和右外壳,用卡槽和螺钉将反馈单元(1)和足端单元(2)限位固定。
2.根据权利要求1所述的一种触地反馈的六足机器人足式结构,其特征在于:所述的反馈单元(1)由两个相同的锥齿轮、圆柱凸轮固定板(13)、法兰边轴承(14)、圆柱凸轮(15)、圆柱凸轮卡槽套筒(16)、随动器螺母(17)、凸轮随动器(18)和编码器(19)组成的;其中两个相同的锥齿轮垂直配合,处于水平放置状态下的锥齿轮(12)的内径孔与圆柱凸轮固定板(13)的圆孔同轴心配合,且固定板有一定深度的阶梯状槽,将法兰边轴承(14)嵌入阶梯状槽中,同时圆柱凸轮(15)的上端通过轴承内孔和锥齿轮内孔同轴心配合;圆柱凸轮卡槽套筒(16)与圆柱凸轮(15)同轴心配合,同时凸轮随动器(18)通过套筒上的圆孔和凸轮卡槽相配合。
3.根据权利要求1所述的一种触地反馈的六足机器人足式结构,其特征在于:所述的足端单元(2)包括连接杆(21)、工程塑料直线轴承(22)、弹簧(23)和橡胶减震器(24);连接杆(21)的上端和圆柱凸轮卡槽套筒(16)底部设有的圆柱槽口同心配合,其下端有一定深度的螺纹孔,橡胶减震器(24)上端带有的外螺纹与螺纹孔配合;工程塑料直线轴承(22)嵌入左外壳(31)和右外壳(32)的组合体的下端的槽口;弹簧(23)与连接杆(21)同轴配合,其上下端在处于原长状态下时分别与固定单元(3)中的外壳结合体底部、橡胶减震器(24)橡胶球的上端面接触。
4.根据权利要求1所述的一种触地反馈的六足机器人足式结构,其特征在于:所述的固定单元(3)包括左外壳(31)、右外壳(32)、螺丝(33)、螺母(34)和舵机(35);左外壳(31)实体的部分有柱状深槽口,右外壳(32)对应的部分有相同长度的圆柱,两外壳对齐配合,同时两外壳在四个紧固孔的对齐配合情况下,通过螺丝(33)和螺母(34)进行紧固;左外壳(31)和右外壳(32)拼接后的组合体上端有一定深度的凹槽,再将舵机(35)嵌入凹槽。
5.根据权利要求4所述的一种触地反馈的六足机器人足式结构,其特征在于:凸轮随动器(18)的另一端是具有一定长度的外螺纹,该外螺纹通过圆柱凸轮卡槽套筒(16)上的圆孔和随动器螺母(17)配合在一起,固定在套筒上;编码器(19)通过右外壳上的通孔将转轴和竖直状态放置下的锥齿轮(11)同轴配合在一起,同时右外壳上对应的螺纹孔和固定编码器(19)上的螺纹孔对齐紧固。
技术总结
本发明涉及机器人技术领域,具体涉及一种触地反馈的六足机器人的足部结构。一种触底反馈的六足机器人的足式结构,包括反馈单元、足端单元和固定单元,所述的反馈单元与足端单元相连接,固定单元再将反馈单元和足端单元连接固定。反馈单元主要是利用了编码器、圆柱凸轮和锥齿轮传动进行信息反馈的;足端单元采用了弹簧和橡胶减震器进行了缓冲;固定单元通过卡槽和螺钉将反馈单元和足端单元限位固定。本发明结构简单、成本较低,能使机器人感知到足部是否触地,从而及时进行相应的步态、姿态的调整,以便适应复杂地形,也能起到一定减震缓冲的作用,同时传感反馈方式灵敏迅速,控制更加方便。
技术研发人员:吴涵,谢婷婷,邓文静,王健,蒯一帆,高杰
受保护的技术使用者:安徽理工大学
技术研发日:20230415
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!