一种变形履带车的避震结构
本技术涉及一种变形履带车的避震结构。
背景技术:
1、随着机器人技术的发展,越来越多的移动底盘被研发出来,为了让履带车能在楼梯上,山地石坡上,甚至废墟上自由地行走。变形履带车被研发了出来。凭借其优秀的履带变形能力,变形履带车可以在更多更复杂的场地上行走。
2、但是,目前市场上存在的变形履带车存在一些问题。例如为了让履带变形,传统的履带避震结构难以复制到变形履带车上。如专利us7493976,通过摆臂绕进行椭圆的运动,让履带车的履带呈现不同的形状,根据不同的地形用不同的形状去适应。但是由于履带车的履带长度是不变的,然后摆臂需要做椭圆运动,从而保证摆臂在各角度下,履带的长度一致。但是因为需要变形,所以若让履带的链轮有一定避震的话,履带变形时容易眺齿甚至脱链。由于履带车没有避震结构,导致履带车运行时震动很大。越障性能也比较差。尤其是单侧履带压过石头时,履带没有缓冲,有更大的倾斜。
技术实现思路
1、为解决以上现有技术存在的问题,本实用新型提出一种变形履带车的避震结构,以提高履带车的越障能力,减小履带车运动过程中的震动。
2、本实用新型可通过以下技术方案予以实现:
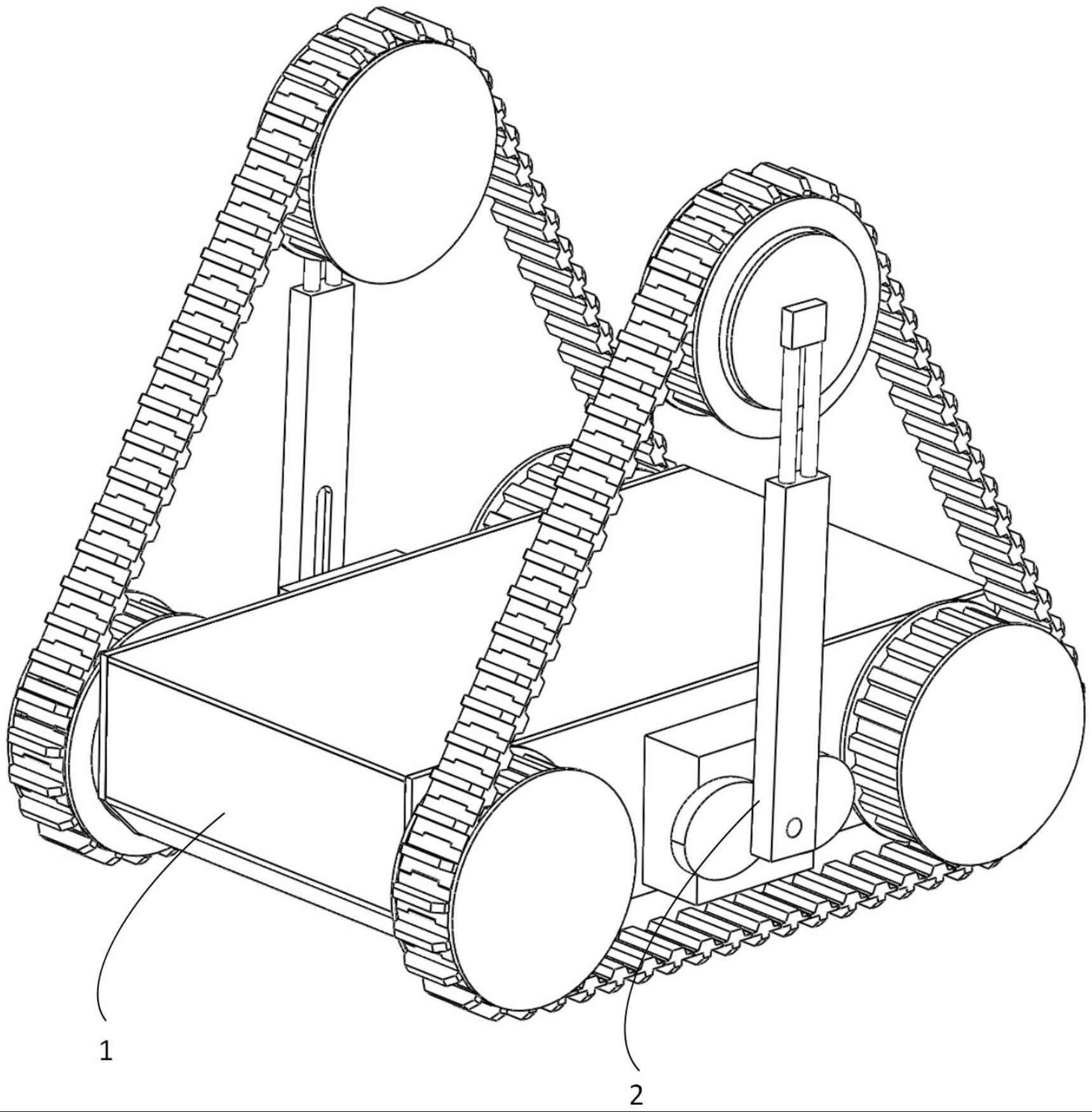
3、一种变形履带车的避震结构,包括底盘模块、2组带轮模块,底盘模块和带轮模块通过避震模块连接,所述底盘模块主要包括电池和电控箱;所述带轮模块包括:固定板、2个电机减速机一体机、驱动带轮、从动带轮、摆杆带轮、凸轮曲线块、摆杆、凸轮杆和履带;所述固定板与底盘模块相连,其中一个电机减速机一体机固定在固定板上,所述驱动带轮与该电机减速机一体机相连;所述从动带轮与固定板连接并能自由旋转;所述凸轮曲线块安装在两轮圆心连接的中点上;所述摆杆一端与凸轮曲线块的形心位置相连并可绕其自由转动;所述凸轮杆在摆杆的轴向滑动而不脱出;所述凸轮杆的下端与凸轮曲线块的圆弧状曲线接触,形成一个凸轮副;所述凸轮杆的另一端连接其中另一个电机减速机一体机,该电机减速机一体机连接摆杆带轮;履带同时环住所述驱动带轮、从动带轮和摆杆带轮;2组带轮模块的装配方式和零件完全一致,都通过所述固定板安装在底盘模块上,与底盘模块连接后呈中心对称;所述避震模块包括2个导向杆,2个弹簧,2个直线轴承;所述导向杆的上下端与底盘模块固连,直线轴承在导向杆上可自由滑动而不脱出;所述弹簧安装于直线轴承的正上方,直线轴承与带轮模块连接。
4、有益效果
5、1.本实用新型通过增加避震模块去连接底盘模块和带轮模块,带轮模块在一定范围内可在底盘模块上滑动。(随着弹簧的压缩量的变化,弹簧力会变化,滑动的阻力会跟着变化)。整个带轮模块与底盘模块之间增加避震模块,即保证了摆臂在各个角度下履带的长度的一致性,也增加了履带车的避震;
6、2.地面的不平整和履带外侧的带齿是导致履带车在运行时震动的主要原因,而随着避震模块的加入,因为弹簧的缓变特性(弹簧上的弹力不能在瞬间突变),履带车的车体会得到有效的缓冲,从而减小履带车运行时的震动。在履带车单侧履带压过石头时,由于两侧的带轮模块是分别通过避震模块和车体模块相连的。所以两侧的带轮模块可独自相对车体模块上下滑动。从而保证履带车有更好的缓冲,有较小的倾斜量。
技术特征:
1.一种变形履带车的避震结构,其特征在于,包括底盘模块、2组带轮模块,底盘模块和带轮模块通过避震模块连接,
技术总结
本技术公开一种变形履带车的避震结构,包括底盘模块、2组带轮模块,底盘模块和带轮模块通过避震模块连接,底盘模块主要包括电池和电控箱;带轮模块包括:固定板、2个电机减速机一体机、驱动带轮、从动带轮、摆杆带轮、凸轮曲线块、摆杆、凸轮杆和履带;底盘模块与带轮模块通过避震模块连接,避震模块包括2个导向杆,2个弹簧,2个直线轴承,导向杆的上下端与底盘模块固连,直线轴承在导向杆上可自由滑动而不脱出,弹簧安装于直线轴承的正上方,直线轴承与带轮模块连接,连接完成后,在一定范围内,带轮模块可在底盘模块上下运动,增加履带车的避震能力和越障能。
技术研发人员:曹燕军,宣驰策
受保护的技术使用者:浙江大学湖州研究院
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!