一种履带车辆履带变形机构的制作方法
本技术涉及履带车辆,具体讲是指一种履带车辆履带变形机构。
背景技术:
1、履带车辆是指用履带行驶系代替车轮行驶系的车辆。这种车辆对地面单位压力小,下陷小,附着能力强,行驶通过能力强。目前常见的一些破拆机器人、消防机器人、排涝机器人、运输机器人等大多以履带车辆作为主体。此外,还有一种水陆两栖的机器人,同样是以履带车辆作为其主体部分,其的履带车辆底部设置抽水马达,利用该抽水马达能够将水排出,实现排涝功能。中国专利cn111959625a公开了一种履带式快换行走系统,其中公开了一种履带机构,该履带机构通过张紧装置使得履带始终保持合适的张紧状态,提高履带车辆的平稳性。但是,上述履带车辆中的履带机构若应用于水陆两栖机器人,由于其支重轮不可调,导致履带大体形状单一,对环境的适应有限,不利于不同环境下的爬坡,在水中行驶时的阻力也较大。
技术实现思路
1、针对现有技术的不足,本实用新型的目的在于提供一种履带车辆履带变形机构,以解决现有技术中履带车辆的履带机构若应用于水陆两栖机器人,不利于不同环境下的爬坡以及在水中行驶阻力较大的技术问题。
2、为解决上述技术问题,本实用新型提供了一种履带车辆履带变形机构,包括履带、张紧轮、第一驱动机构、第二驱动机构和若干支重轮,若干支重轮连接在履带内圈底端,张紧轮连接在履带内圈,第一驱动机构连接张紧轮并用于驱动张紧轮横向移动,第二驱动机构连接每个支重轮并用于驱动若干支重轮同步竖向移动,当第二驱动机构驱动支重轮上升或下降时,第一驱动机构同步驱动张紧轮移动来张紧履带,使得履带在“倒梯形”和“一字型”之间切换。
3、采用上述结构后,本实用新型一种履带车辆履带变形机构具有以下优点:当履带处于“倒梯形”时,能够增大爬坡及侧倾角度,并且根据地形改变支重轮的高度,进而改变“倒梯形”的倾角斜度,使其更加与地形相匹配,并且也能降低整车重心,提高爬坡能力,提高行驶的稳定性,当履带变形呈“一字型”时,也能够减小在水中行驶时的阻力;而且应用在排涝机器人时,通过提高支重轮,降低车辆的高度,使得排涝机器人底部的抽水马达能够抽取到更低水面的水,提高排涝机器人的排涝能力。
4、作为改进,张紧轮连接在履带内圈的前端,当第二驱动机构驱动支重轮上升时,第一驱动机构同步驱动张紧轮向前移动,使得履带往“一字型”变形,当第二驱动机构驱动支重轮下降时,第一驱动机构同步驱动张紧轮向后移动,使得履带往“倒梯形”变形;采用此种结构,张紧轮设置在履带内圈前端而非上端,在支重轮向上移动时,张紧轮向前而非向上移动,使得履带前后方向长度变长而非往上变形,避免影响履带车辆的车架部分的结构,使得结构更加稳定。
5、作为改进,支重轮呈等距分布;采用此种结构,使得履带变形机构的结构更加稳定。
6、作为改进,本实用新型还包括驱动轮,驱动轮连接在履带内圈的后端,张紧轮连接在履带内圈的前端,张紧轮与驱动轮等高且若干支重轮位于张紧轮和驱动轮之间。
7、作为改进,第一驱动机构包括张紧油缸,张紧油缸连接张紧轮。
8、作为改进,第二驱动机构包括若干支重油缸,每个支重油缸分别连接其中一个支重轮。
9、作为改进,每个支重轮上均连接有平衡肘,支重油缸连接平衡肘并通过平衡肘驱动支重轮移动;采用此种结构,提高支重轮移动时的稳定性。
10、作为改进,本实用新型还包括油路主路和若干油路支路,若干油路支路分别连接一个支重油缸,若干油路支路连接油路主路,油路主路上连接有蓄能器;采用此种结构,当支重轮因路面障碍物受到径向冲击载荷时,一个或多个支重油缸缩回,腔体内液压油进入蓄能器液压腔体,使得蓄能器氮气腔体气体压缩,越过障碍物时,被压缩氮气膨胀使得支重油缸伸出,起到对车辆的缓冲减震作用。
技术特征:
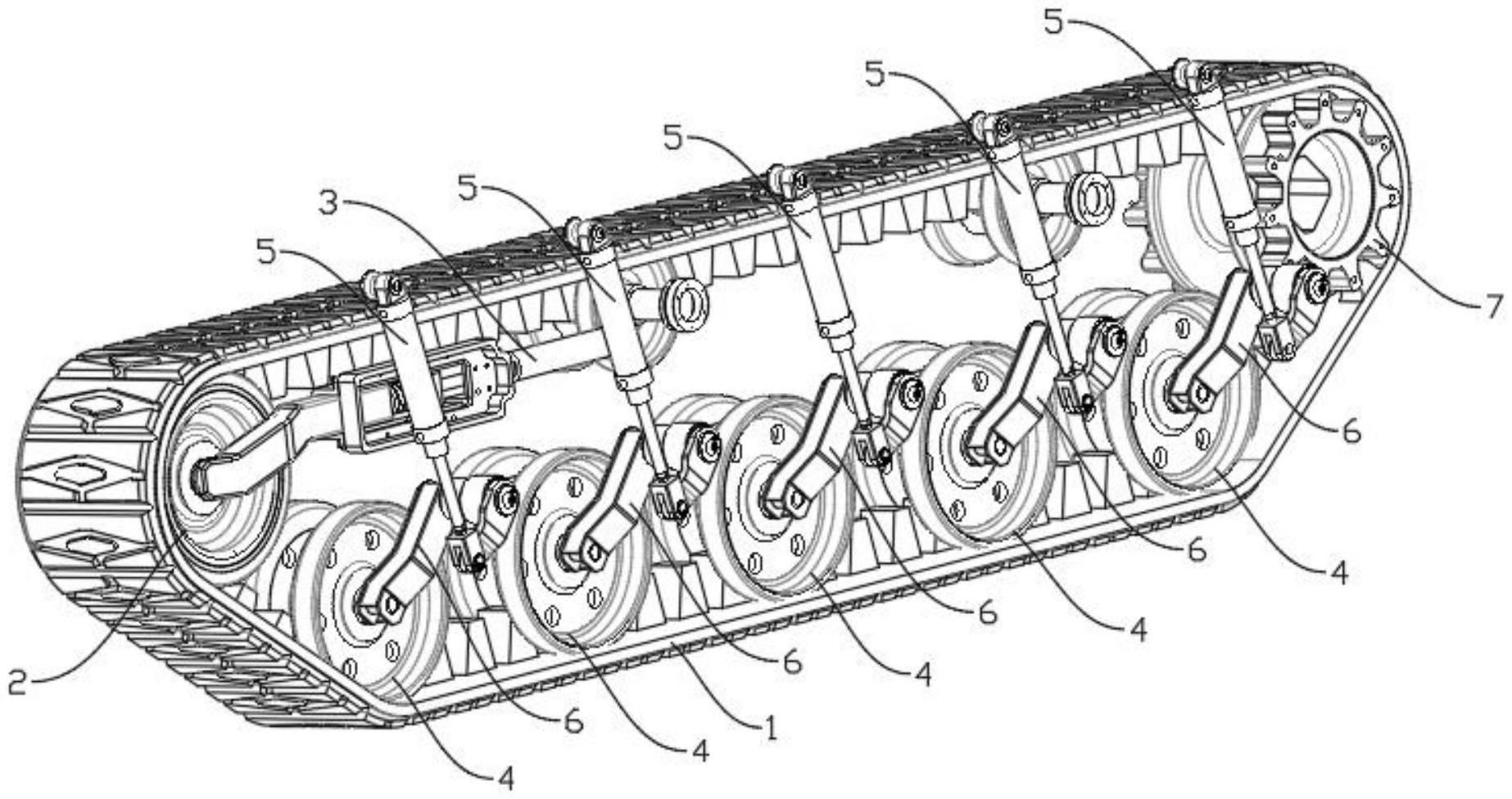
1.一种履带车辆履带变形机构,其特征在于,包括履带(1)、张紧轮(2)、第一驱动机构、第二驱动机构和若干支重轮(4),若干所述支重轮(4)连接在所述履带(1)内圈底端,所述张紧轮(2)连接在所述履带(1)内圈,所述第一驱动机构连接所述张紧轮(2)并用于驱动所述张紧轮(2)横向移动,所述第二驱动机构连接每个所述支重轮(4)并用于驱动若干所述支重轮(4)同步竖向移动,当所述第二驱动机构驱动所述支重轮(4)上升或下降时,所述第一驱动机构同步驱动所述张紧轮(2)移动来张紧所述履带(1),使得所述履带(1)在“倒梯形”和“一字型”之间切换。
2.根据权利要求1所述的一种履带车辆履带变形机构,其特征在于,所述张紧轮(2)连接在所述履带(1)内圈的前端,当所述第二驱动机构驱动所述支重轮(4)上升时,所述第一驱动机构同步驱动所述张紧轮(2)向前移动,使得所述履带(1)往“一字型”变形,当所述第二驱动机构驱动所述支重轮(4)下降时,所述第一驱动机构同步驱动所述张紧轮(2)向后移动,使得所述履带(1)往“倒梯形”变形。
3.根据权利要求1所述的一种履带车辆履带变形机构,其特征在于,所述支重轮(4)呈等距分布。
4.根据权利要求1所述的一种履带车辆履带变形机构,其特征在于,还包括驱动轮(7),所述驱动轮(7)连接在所述履带(1)内圈的后端,所述张紧轮(2)连接在所述履带(1)内圈的前端,所述张紧轮(2)与所述驱动轮(7)等高且若干所述支重轮(4)位于所述张紧轮(2)和所述驱动轮(7)之间。
5.根据权利要求1所述的一种履带车辆履带变形机构,其特征在于,所述第一驱动机构包括张紧油缸(3),所述张紧油缸(3)连接所述张紧轮(2)。
6.根据权利要求1所述的一种履带车辆履带变形机构,其特征在于,所述第二驱动机构包括若干支重油缸(5),每个所述支重油缸(5)分别连接其中一个所述支重轮(4)。
7.根据权利要求6所述的一种履带车辆履带变形机构,其特征在于,每个所述支重轮(4)上均连接有平衡肘(6),所述支重油缸(5)连接所述平衡肘(6)并通过所述平衡肘(6)驱动所述支重轮(4)移动。
8.根据权利要求6所述的一种履带车辆履带变形机构,其特征在于,还包括油路主路(8)和若干油路支路(9),若干所述油路支路(9)分别连接一个所述支重油缸(5),若干所述油路支路(9)连接所述油路主路(8),所述油路主路(8)上连接有蓄能器(10)。
技术总结
本技术涉及一种履带车辆履带变形机构,包括履带、张紧轮、第一驱动机构、第二驱动机构和若干支重轮,若干支重轮连接在履带内圈底端,张紧轮连接在履带内圈,第一驱动机构连接张紧轮并用于驱动张紧轮横向移动,第二驱动机构连接每个支重轮并用于驱动若干支重轮同步竖向移动,当第二驱动机构驱动支重轮上升或下降时,第一驱动机构同步驱动张紧轮移动来张紧履带,使得履带在“倒梯形”和“一字型”之间切换;以解决现有技术中履带车辆的履带机构若应用于水陆两栖机器人,不利于不同环境下的爬坡以及在水中行驶阻力较大的技术问题。
技术研发人员:邓开忠
受保护的技术使用者:宁波中宁液压有限公司
技术研发日:20230519
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!