一种多向运动的爬行软体机器人
本技术涉及软体机器人领域,尤其涉及一种多向运动的爬行软体机器人。
背景技术:
1、中国专利cn114055453a公开了一种多模态运动仿生尺蠖爬行、攀爬软体机器人,包括足部以及依次连接在两个足部之间的三个可形变体,可形变体具有可伸展面以及不可伸展面,可伸展面位于不可伸展面的相对侧使得可形变体能够在一字形结构到c形结构之间形变,在三个可形变体均处于一字形结构时,中间的可形变体不可伸展面朝向与足部的抓地面朝向相同且与位于两侧可变形体的不可伸展面朝向相反使得可形变体能够以柔性形变的方式配合足部完成水平爬行动作和/或攀爬动作。
2、但在上述现有技术中,不借助外界挡板的情况下,软体机器人通过自身的控制无法对行进运动方向进行转变,从而软体机器人在爬行过程中改变方向的能力有待提高。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述问题,本申请实施例提供一种多向运动的爬行软体机器人,旨在解决现有技术中软体机器人在爬行时转向能力有待提高的问题。
2、本实用新型为解决上述技术问题提供如下技术方案:
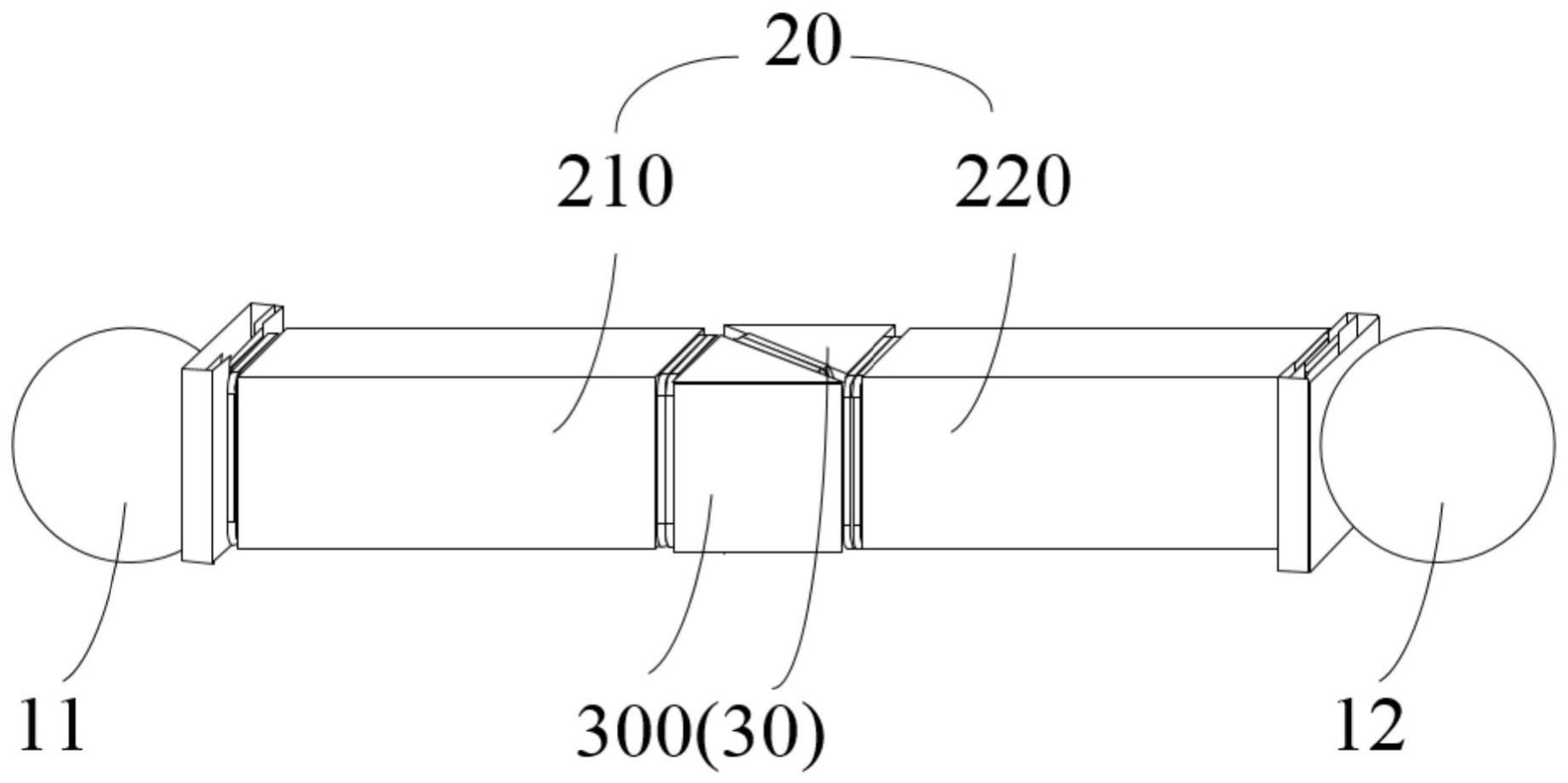
3、本申请实施例提供一种多向运动的爬行软体机器人,放置于爬行面,其中,包括第一锚定件、第二锚定件,以及连接在所述第一锚定件和所述第二锚定件之间的关节组件和伸缩组件;
4、所述第一锚定件和所述第二锚定件可分别固定于所述爬行面,配合所述伸缩组件可收缩或伸展,以使所述软体机器人沿预设方向运动,所述关节组件可收缩以改变所述软体机器人的运动方向。
5、所述的多向运动的爬行软体机器人,其中,所述伸缩组件包括第一伸缩件和第二伸缩件;
6、所述第一锚定件、所述第一伸缩件、所述关节组件、所述第二伸缩件和所述第二锚定件依序连接;或
7、所述第一锚定件、所述关节组件、所述第一伸缩件、所述第二伸缩件和所述第二锚定件依序连接。
8、所述的多向运动的爬行软体机器人,其中,所述关节组件包括两个相连的关节部件,两个所述关节部件呈三棱柱状且相对设置。
9、所述的多向运动的爬行软体机器人,其中,所述关节部件包括:
10、海绵关节块,呈直角三棱柱状,所述海绵关节块上的若干气孔可释放气体以使所述海绵关节块收缩;
11、第一密封膜,套设于所述海绵关节块外侧。
12、所述的多向运动的爬行软体机器人,其中,所述第一伸缩件包括:
13、海绵伸缩块,呈长方体状,所述海绵伸缩块上的若干气孔可释放气体以使所述海绵伸缩块收缩;
14、第二密封膜,套设于所述海绵伸缩块外侧。
15、所述的多向运动的爬行软体机器人,其中,所述第一锚定件包括:
16、连接结构,与所述第一伸缩件连接;
17、柔性结构,与所述连接结构连接,所述柔性结构膨胀后可增大与所述爬行面之间的摩擦力。
18、所述的多向运动的爬行软体机器人,其中,
19、所述海绵关节块中插设有第一连通管,所述第一连通管用于向所述海绵关节块内提供负压或正压,以使所述海绵关节块收缩或伸展;和/或
20、所述海绵伸缩块中插设有第二连通管,所述第二连通管用于向所述海绵伸缩块内提供负压或正压,以使所述海绵伸缩块收缩或伸展。
21、所述的多向运动的爬行软体机器人,其中,所述柔性结构的开口处密封连接有第三连通管,所述第三连通管用于向所述柔性结构内提供正压或负压,以使所述柔性结构膨胀或收缩。
22、所述的多向运动的爬行软体机器人,其中,所述海绵关节块的两侧分别设有一个第一磁铁,所述海绵伸缩块的两侧分别连接有一个第二磁铁,所述第一磁铁与所述第二磁铁;
23、所述连接结构上设有安装槽,所述安装槽内连接有第三磁铁,所述第二磁铁与所述第三磁铁磁吸连接。
24、所述的多向运动的爬行软体机器人,其中,所述连接结构上设有连接孔和容纳槽,所述第三连通管通过所述连接孔,并从所述容纳槽内伸出。
25、有益效果:本实用新型提供一种多向运动的爬行软体机器人,放置于爬行面,其中,包括第一锚定件、第二锚定件,以及连接在所述第一锚定件和所述第二锚定件之间的关节组件和伸缩组件;所述第一锚定件和所述第二锚定件可分别固定于所述爬行面,配合所述伸缩组件可收缩或伸展,以使所述软体机器人沿预设方向运动,所述关节组件可收缩以改变所述软体机器人的运动方向。本申请的软体机器人通过第一锚定件和第二锚定件二者之一固定于爬行面,控制伸缩组件收缩或伸展,从而实现软体机器人在爬行面上的直线运动,并能够通过控制关节组件的收缩或伸展以改变在爬行面上的行进方向,本申请结构简单且便于调整软体机器人的行进方向,进而增大软体机器人的工作适用范围。
26、除了上面所描述的本申请解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本申请提供的多向运动的爬行软体机器人所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
技术特征:
1.一种多向运动的爬行软体机器人,放置于爬行面,其特征在于,包括第一锚定件、第二锚定件,以及连接在所述第一锚定件和所述第二锚定件之间的关节组件和伸缩组件;
2.根据权利要求1所述的多向运动的爬行软体机器人,其特征在于,所述伸缩组件包括第一伸缩件和第二伸缩件;
3.根据权利要求2所述的多向运动的爬行软体机器人,其特征在于,所述关节组件包括两个相连的关节部件,两个所述关节部件呈三棱柱状且相对设置。
4.根据权利要求3所述的多向运动的爬行软体机器人,其特征在于,所述关节部件包括:
5.根据权利要求4所述的多向运动的爬行软体机器人,其特征在于,所述第一伸缩件包括:
6.根据权利要求5所述的多向运动的爬行软体机器人,其特征在于,所述第一锚定件包括:
7.根据权利要求5所述的多向运动的爬行软体机器人,其特征在于,
8.根据权利要求6所述的多向运动的爬行软体机器人,其特征在于,所述柔性结构的开口处密封连接有第三连通管,所述第三连通管用于向所述柔性结构内提供正压或负压,以使所述柔性结构膨胀或收缩。
9.根据权利要求6所述的多向运动的爬行软体机器人,其特征在于,所述海绵关节块的两侧分别设有一个第一磁铁,所述海绵伸缩块的两侧分别连接有一个第二磁铁,所述第一磁铁与所述第二磁铁;
10.根据权利要求8所述的多向运动的爬行软体机器人,其特征在于,所述连接结构上设有连接孔和容纳槽,所述第三连通管通过所述连接孔,并从所述容纳槽内伸出。
技术总结
本技术公开了一种多向运动的爬行软体机器人,放置于爬行面,其中,包括第一锚定件、第二锚定件,以及连接在所述第一锚定件和所述第二锚定件之间的关节组件和伸缩组件;所述第一锚定件和所述第二锚定件可分别固定于所述爬行面,配合所述伸缩组件可收缩或伸展,以使所述软体机器人沿预设方向运动,所述关节组件可收缩以改变所述软体机器人的运动方向。软体机器人通过第一锚定件和第二锚定件二者之一固定于爬行面,控制伸缩组件收缩或伸展,从而实现软体机器人在爬行面上的直线运动,并能够通过控制关节组件的收缩或伸展以改变在爬行面上的行进方向,本申请结构简单且便于调整软体机器人的行进方向,进而增大软体机器人的工作适用范围。
技术研发人员:黄海明,谢钧涛,林芷然,欧阳佳妮,王雨谋,蒙灿祺,逄崇玉
受保护的技术使用者:深圳大学
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!