基于驱动桥架的AGV底盘的制作方法
本技术涉及一种基于驱动桥架的agv底盘。
背景技术:
1、随着agv(搬运机器人)的应用领域不断拓展,需求不断提高,传统的底盘结构在应用于具有大跨度的尺寸的机器人时,不能满足刚性需求,也就是说,传统的底盘在安装于大尺寸的机器人时,底盘的支撑能力不够,从而容易发生底盘断裂或者变形的问题,影响搬运机器人的搬运稳定性。
技术实现思路
1、本实用新型提供了一种基于驱动桥架的agv底盘解决上述提到的技术问题,具体采用如下的技术方案:
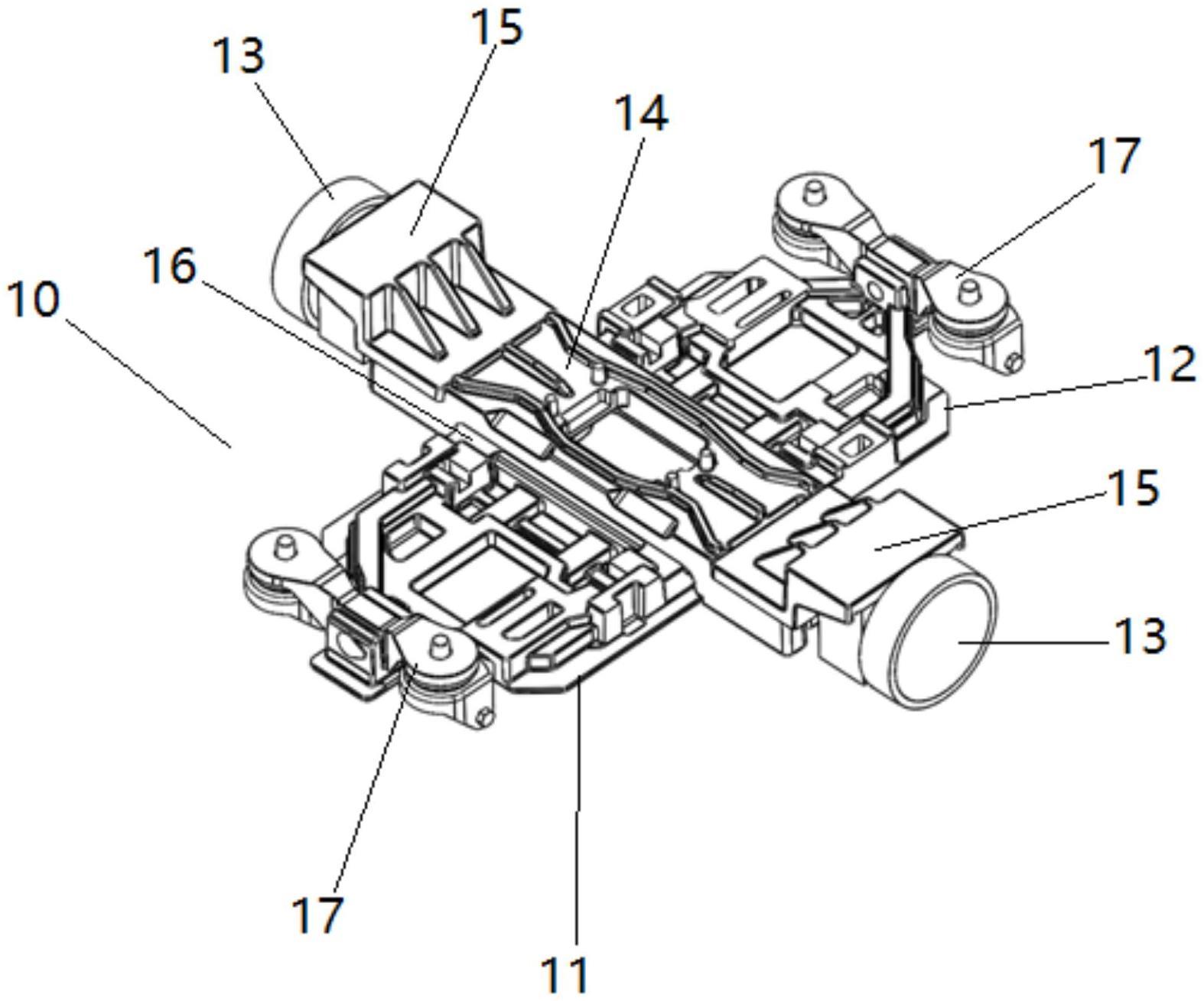
2、一种基于驱动桥架的agv底盘,包括:前底盘、后底盘和驱动轮;基于驱动桥架的agv底盘还包括驱动桥架;前底盘和后底盘中的一个固定连接至驱动桥架;前底盘和后底盘中的另一个转动连接至驱动桥架;前底盘和后底盘中的转动连接至驱动桥架的一个与驱动桥架之间形成有用于允许其自身进行转动以进行爬坡的转动间隙;驱动桥架的两端分别形成有安装部;安装部固定有连接钣金;连接钣金的下方安装有的驱动轮。
3、进一步地,驱动桥架形成有安装凹部;安装凹部的两端形成有用于释放前底盘和后底盘中的转动连接至驱动桥架的一个的两侧与驱动桥架之间的应力的圆角。
4、进一步地,驱动桥架的上侧形成有多条用于提高驱动桥架的结构强度的第一加强筋。
5、进一步地,连接钣金形成有用于连接驱动轮的阶梯部;阶梯部的上阶梯面和下阶梯面之间设有多个用于加强连接钣金的结构强度的第二加强筋。
6、进一步地,安装部的下侧形成有螺孔;连接钣金在阶梯部的下方形成有安装耳;安装耳形成有配合螺孔;连接钣金通过螺钉依次旋入配合螺孔和螺孔从驱动桥架的下方固定至安装部;安装耳从安装部的下方抵触安装部的下侧且阶梯部从安装部的上方抵触安装部的上侧。
7、进一步地,驱动桥架的两端的下侧还形成有用于限定连接钣金以实现安装预定位的限位凹部;安装耳形成有用于配合限位凹部的限位凸部。
8、进一步地,前底盘和后底盘的远离驱动桥架的端部均铰接连接有辅助脚轮架;辅助脚轮架的两端均转动连接有脚轮。
9、进一步地,两个辅助脚轮架和驱动桥架相互平行设置。
10、本实用新型的有益之处在于所提供的基于驱动桥架的agv底盘具有较强的刚性,在保证结构强度的同时,还能够提高搬运机器人的重心稳定性,使得搬运机器人运行更加平稳。
技术特征:
1.一种基于驱动桥架的agv底盘,包括:前底盘、后底盘和驱动轮;其特征在于,
2.根据权利要求1所述的基于驱动桥架的agv底盘,其特征在于,
3.根据权利要求1所述的基于驱动桥架的agv底盘,其特征在于,
4.根据权利要求1所述的基于驱动桥架的agv底盘,其特征在于,
5.根据权利要求4所述的基于驱动桥架的agv底盘,其特征在于,
6.根据权利要求5所述的基于驱动桥架的agv底盘,其特征在于,
7.根据权利要求1所述的基于驱动桥架的agv底盘,其特征在于,
8.根据权利要求7所述的基于驱动桥架的agv底盘,其特征在于,
技术总结
本技术公开了一种基于驱动桥架的AGV底盘,包括:前底盘、后底盘和驱动轮;基于驱动桥架的AGV底盘还包括驱动桥架;前底盘和后底盘中的一个固定连接至驱动桥架;前底盘和后底盘中的另一个转动连接至驱动桥架;前底盘和后底盘中的转动连接至驱动桥架的一个与驱动桥架之间形成有用于允许其自身进行转动以进行爬坡的转动间隙;驱动桥架的两端分别形成有安装部;安装部固定有连接钣金;连接钣金的下方安装有的驱动轮。本技术的基于驱动桥架的AGV底盘结构强度高,适用于较大的搬运机器人。
技术研发人员:杜相泉,李卫君
受保护的技术使用者:浙江迈睿机器人有限公司
技术研发日:20230531
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!