一种重载自动驾驶车辆的转向桥总成的制作方法
本发明涉及重载自动驾驶车辆,具体涉及一种重载自动驾驶车辆的转向桥总成。
背景技术:
1、市场上重载自动驾驶车辆的转向技术方法,一般采用电转向轮或者集成舵轮。电转向轮主要由转向电机、齿轮箱、轮胎、连接框架等组成;集成舵轮主要由驱动电机、转向电机、齿轮箱、轮胎、连接框架等组成。采用上述方式存在以下不足:
2、一、电转向轮或者集成舵轮成本均较高,单个产品本身售价都在数万元人民币,会大大增加整车的成本,不利于整车的市场竞争。
3、二、随着对承载吨位要求的提高,需选用较大承载能力的电转向轮或者集成舵轮,目前市场上同类产品比较大的承载能力普遍小于6吨,不满足重载自动驾驶车辆使用。
4、三、电转向轮或者集成舵轮,电机普遍以直流伺服电机为主,因为没有单独的散热系统,在搬运车使用的三种工况下(即空载、满载平地、满载爬坡),始终控制电机在额定点以下工作。如果实际工况需要超出额定点,则只有选择更大功率的电机,或者重新选项电转向轮或者集成舵轮。
5、四、电转向轮或者集成舵轮,其轮胎普遍为聚氨酯轮胎,舒适性较差,对路面要求较高,且磨损后,更换轮胎比较费时费力。
6、由此可见,研究一种成本低、承载能力大、过载能力强的重载自动驾驶车辆的转向系统至关重要。
技术实现思路
1、本实用新型要解决的技术问题是如何提供一种成本低、承载能力大、过载能力强的重载自动驾驶车辆的转向系统。
2、为了解决上述技术问题,本实用新型提供了一种重载自动驾驶车辆的转向桥总成,所述车辆上设置有交流转向电机控制器,包括:
3、转向减速机构,所述转向减速机构包括转向电机和转向减速箱;
4、液压转向机构,所述液压转向机构位于所述转向减速机构下方且通过旋转轴与所述转向减速机构连接,所述液压转向机构包括与所述旋转轴连接的万向节和位于所述万向节下方的液压转向器;以及
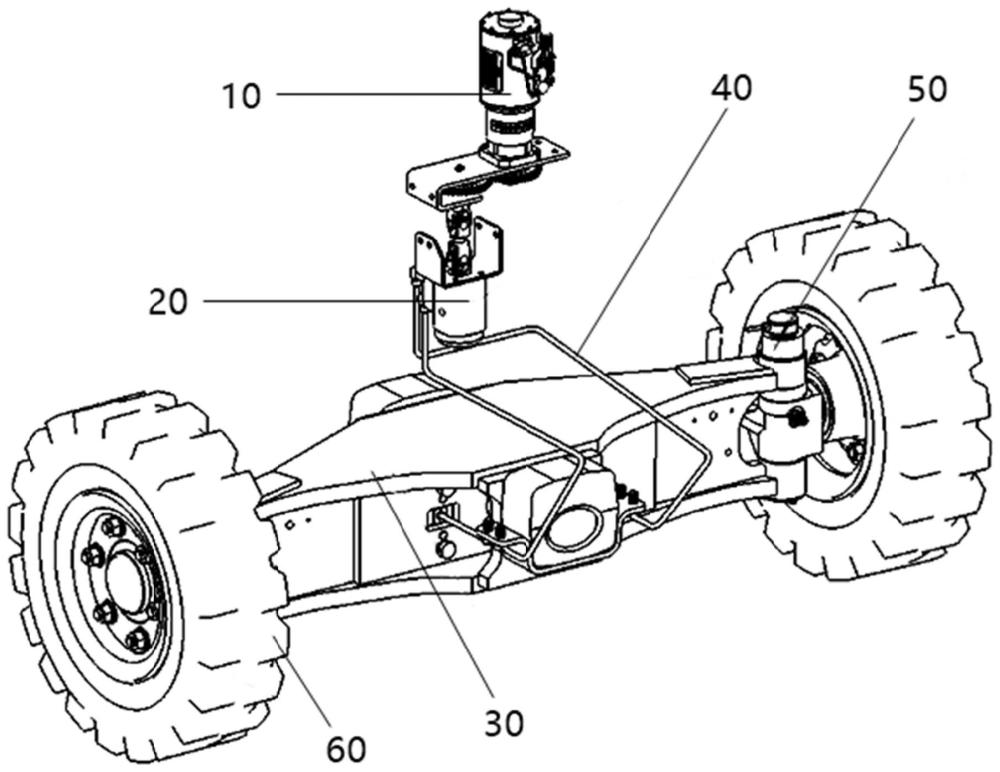
5、重载横置油缸转向桥,所述重载横置油缸转向桥通过管路与所述液压转向机构连接,其中,所述交流转向电机控制器接收转向指令,控制所述转向电机的转速和旋转方向,带动所述转向减速箱工作,经动力传递并带动所述旋转轴旋转,通过所述万向节带动所述液压转向器工作。
6、进一步的,所述转向减速机构还包括水平方向相互啮合的第一转向齿轮和第二转向齿轮,所述第一转向齿轮和第二转向齿轮通过上安装支架固定在所述转向减速箱下方,其中,所述第二转向齿轮与所述旋转轴相接触。
7、进一步的,所述液压转向机构还包括多个接头,所述接头用于连接所述管路。
8、进一步的,所述重载横置油缸转向桥横置在两个重载用宽面轮胎之间,所述重载横置油缸转向桥与所述重载用宽面轮胎的连接处设置有转角检测机构。
9、进一步的,所述转角检测机构包括圆筒状的安装支座,所述安装支座上设置有实时检测轮胎角度的绝对值编码器,所述安装支座内还设置有与所述重载横置油缸转向桥连接的连接轴。
10、与现有技术相比,本实用新型具有如下有益效果:
11、本实用新型提供一种重载自动驾驶车辆的转向桥总成,成本是现有的电转向轮方案或者集成舵轮方案的1/5左右,成本较低,同时承载能力是市场上重载用电转向轮和舵轮的3-5倍;且选用的都是交流异步电机,过载能力强,控制技术成熟、可靠。
技术特征:
1.一种重载自动驾驶车辆的转向桥总成,所述车辆上设置有交流转向电机控制器,其特征在于,包括:
2.根据权利要求1所述的重载自动驾驶车辆的转向桥总成,其特征在于,所述转向减速机构(10)还包括水平方向相互啮合的第一转向齿轮(13)和第二转向齿轮(14),所述第一转向齿轮(13)和第二转向齿轮(14)通过上安装支架(15)固定在所述转向减速箱(12)下方,其中,所述第二转向齿轮(14)与所述旋转轴(21)相接触。
3.根据权利要求1所述的重载自动驾驶车辆的转向桥总成,其特征在于,所述液压转向机构(20)还包括多个接头(24),所述接头(24)用于连接所述管路(40)。
4.根据权利要求1所述的重载自动驾驶车辆的转向桥总成,其特征在于,所述重载横置油缸转向桥(30)横置在两个重载用宽面轮胎(60)之间,所述重载横置油缸转向桥(30)与所述重载用宽面轮胎(60)的连接处设置有转角检测机构(50)。
5.根据权利要求4所述的重载自动驾驶车辆的转向桥总成,其特征在于,所述转角检测机构(50)包括圆筒状的安装支座(51),所述安装支座(51)上设置有实时检测轮胎角度的绝对值编码器(52),所述安装支座(51)内还设置有与所述重载横置油缸转向桥(30)连接的连接轴(53)。
技术总结
本技术提供了一种重载自动驾驶车辆的转向桥总成,所述车辆上设置有交流转向电机控制器,包括转向减速机构,所述转向减速机构包括转向电机和转向减速箱;液压转向机构,所述液压转向机构位于所述转向减速机构下方且通过旋转轴与所述转向减速机构连接,所述液压转向机构包括与所述旋转轴连接的万向节和位于所述万向节下方的液压转向器;以及重载横置油缸转向桥,所述重载横置油缸转向桥通过管路与所述液压转向机构连接。本技术成本较低,同时承载能力大。
技术研发人员:张玉伟,杨德洲,鲍艳,佘江寅
受保护的技术使用者:安徽合力股份有限公司牵引车分公司
技术研发日:20230830
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!