轻便负压行走机器人的制作方法
本技术属于机器人,尤其涉及轻便负压行走机器人。
背景技术:
1、轻便负压行走机器人是一种结合了轻便设计和负压技术的机器人,负压技术是指通过负压差来实现吸附和移动的原理,常用于清洁、排污和检测等领域,而轻便设计则强调机器人本身的重量轻、体积小,以提高机器人的灵活性和携带便利性,轻便负压行走机器人通常具备以下特点,轻巧便携,采用轻量化材料和紧凑设计,使机器人整体重量较轻,易于携带和操作,负压吸附,具备负压系统,通过负压差产生吸力,可以在平滑或不规则表面上行走和附着,灵活机动,具备多轮或多足结构,能够在各种环境中灵活移动、转向和避障,应用领域广泛,可应用于清洁、检测、救援等领域,如玻璃墙清洁、管道内部检测等,轻便负压行走机器人的设计和应用目的在于提高工作效率、降低人力成本,并能够应对一些特殊环境下的任务需求。
2、经检索,中国专利公开了一种轻便负压行走机器人(授权公告号cn 113581325a),该专利技术能够达到包括驱动底盘组件和密封裙组件;所述驱动底盘组件包括顶盖、风机组件、底盘本体和驱动轮组件,所述密封裙组件包括密封垫、弹性支撑体、橡胶圈;所述顶盖和底盘本体扣合在一起形成一个密闭腔体,所述风机组件设置在顶盖和底盘本体形成的密闭腔体内,所述底盘本体设置有进风口,所述顶盖设置出风口;所述底盘本体用以搭载驱动轮组件和密封裙组件;所述橡胶圈的截面为半包围结构的u型槽,并且所述弹性支撑体设置在橡胶圈的u型槽内。本发明提供的轻便负压行走机器人,具有特殊的密封裙结构,可以适应不同曲面、缺陷面,能够兼容轻型化与多功能化,可以稳定地吸附,且可以应对多种工作环境。
3、上述专利中的一种轻便负压行走机器人在使用时存在以下问题:
4、1、一种轻便负压行走机器人不具备对在凹凸、崎岖以及不规则的路面上行走时,降低其冲击所带来的能量的装置,机器人在路面上颠簸时上下结构的不稳定会导致装置零部件的碰撞损耗,严重影响了本装置的使用寿命,给使用者带来不便。
技术实现思路
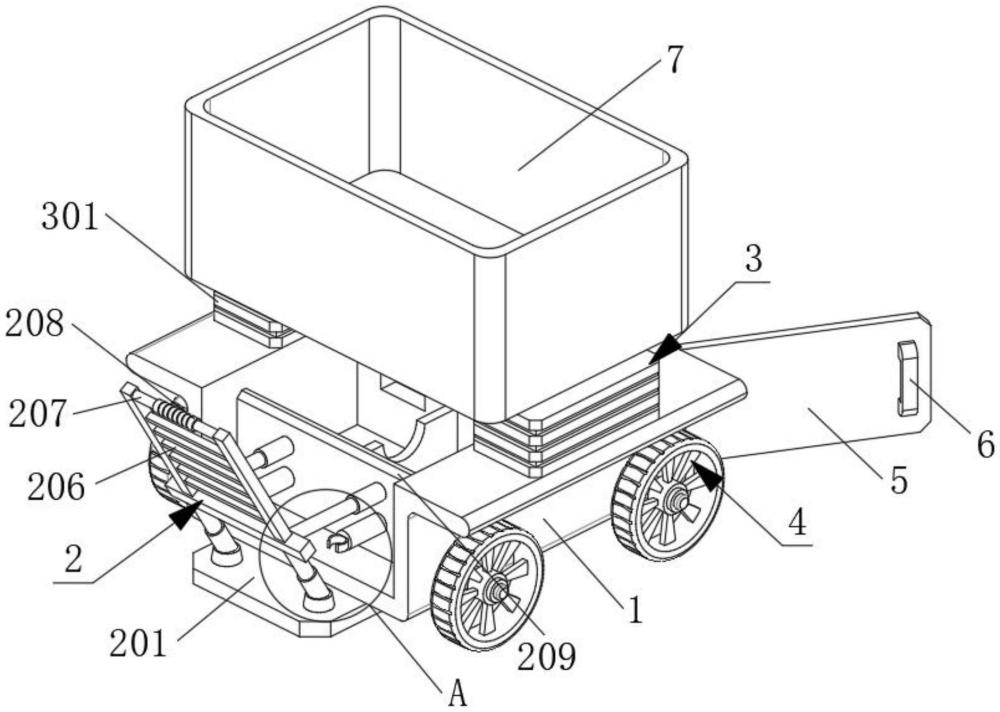
1、为实现上述目的,本实用新型的具体技术方案如下:轻便负压行走机器人,包括机器人本体、轻便机构、负压机构和移动机构,所述轻便机构包括固定板、活动吸盘、支撑杆、固定杆、固定支架、支撑架、支架杆、橡皮套、放置板、电动伸缩杆、放置杆和活动卡扣,所述固定板固定安装在机器人本体的底部,所述活动吸盘固定连接在固定板的顶部,所述支撑杆活动连接在活动吸盘的顶部,所述固定杆固定连接在支撑杆的顶部,所述固定支架固定连接在固定杆的顶部,所述支撑架固定连接在固定支架的内侧,所述支架杆固定连接在固定支架内侧的顶部,所述橡皮套套设在支架杆的表面。
2、作为本实用新型优选的,所述放置板固定安装在机器人本体的内侧,所述电动伸缩杆固定安装在放置板正面的顶部,所述放置杆固定安装在放置板正面的底部,所述活动卡扣活动连接在放置杆的正面,所述活动卡扣与支撑杆活动连接。
3、作为本实用新型优选的,所述机器人本体的背面活动连接有活动门,所述活动门的表面固定连接有门把手,所述活动门正面的右侧和机器人本体内侧的左端均固定安装有固定卡扣,所述固定卡扣的表面活动连接有活动橡胶圈。
4、作为本实用新型优选的,所述负压机构包括减震板、海绵软垫、圆形槽口、阻尼器、弹簧和连接块,所述减震板固定安装在机器人本体的顶部,所述海绵软垫固定连接在减震板的内侧,所述圆形槽口开设在减震板和海绵软垫的内侧,所述弹簧固定连接在圆形槽口内腔的底部,所述弹簧与减震板固定连接,所述连接块固定连接在弹簧的顶部,所述阻尼器活动连接在弹簧的内侧,所述阻尼器分别与减震板和连接块活动连接。
5、作为本实用新型优选的,所述移动机构包括连接柱、活动柱、支架框、限位柱、限位螺栓、脚轮和皮带,所述连接柱固定安装在机器人本体底部的外侧,所述活动柱活动连接在连接柱的表面,所述支架框固定连接在活动柱的外侧。
6、作为本实用新型优选的,所述限位柱活动连接在活动柱外侧,所述限位螺栓螺纹连接在限位柱的外侧,所述限位螺栓与连接柱固定且螺纹连接,所述脚轮固定安装在支架框的外侧,所述皮带套设在脚轮的外侧。
7、作为本实用新型优选的,所述连接块的顶部固定安装有放置箱,所述机器人本体的内侧固定连接有隔板,所述隔板的外侧固定连接有矩形板,所述矩形板与机器人本体固定连接。
8、与现有技术相比,本实用新型的有益效果如下:
9、1、该轻便负压行走机器人,通过设置轻便机构,可以有效地实现装置在使用过程中具备提高机器人本体的灵活性和携带便利性的功能,通过支架杆和橡皮套易于便于使用者的拉动和操作,满足先阶段使用者的需求。
10、2、该轻便负压行走机器人,通过设置负压机构,可以有效地实现装置在使用过程中具备在平滑或不规则表面上行走的功能,同时通过弹簧和阻尼器,弹簧用来吸收放置箱冲击减震板所带来的能量,阻尼器控制放置箱和弹簧在移动过程中的共振振幅。
技术特征:
1.轻便负压行走机器人,包括机器人本体(1)、轻便机构(2)、负压机构(3)和移动机构(4),其特征在于:所述轻便机构(2)包括固定板(201)、活动吸盘(202)、支撑杆(203)、固定杆(204)、固定支架(205)、支撑架(206)、支架杆(207)、橡皮套(208)、放置板(209)、电动伸缩杆(2010)、放置杆(2011)和活动卡扣(2012),所述固定板(201)固定安装在机器人本体(1)的底部,所述活动吸盘(202)固定连接在固定板(201)的顶部,所述支撑杆(203)活动连接在活动吸盘(202)的顶部,所述固定杆(204)固定连接在支撑杆(203)的顶部,所述固定支架(205)固定连接在固定杆(204)的顶部,所述支撑架(206)固定连接在固定支架(205)的内侧,所述支架杆(207)固定连接在固定支架(205)内侧的顶部,所述橡皮套(208)套设在支架杆(207)的表面。
2.根据权利要求1所述的轻便负压行走机器人,其特征在于:所述放置板(209)固定安装在机器人本体(1)的内侧,所述电动伸缩杆(2010)固定安装在放置板(209)正面的顶部,所述放置杆(2011)固定安装在放置板(209)正面的底部,所述活动卡扣(2012)活动连接在放置杆(2011)的正面,所述活动卡扣(2012)与支撑杆(203)活动连接。
3.根据权利要求1所述的轻便负压行走机器人,其特征在于:所述机器人本体(1)的背面活动连接有活动门(5),所述活动门(5)的表面固定连接有门把手(6),所述活动门(5)正面的右侧和机器人本体(1)内侧的左端均固定安装有固定卡扣(8),所述固定卡扣(8)的表面活动连接有活动橡胶圈(9)。
4.根据权利要求1所述的轻便负压行走机器人,其特征在于:所述负压机构(3)包括减震板(301)、海绵软垫(302)、圆形槽口(303)、阻尼器(304)、弹簧(305)和连接块(306),所述减震板(301)固定安装在机器人本体(1)的顶部,所述海绵软垫(302)固定连接在减震板(301)的内侧,所述圆形槽口(303)开设在减震板(301)和海绵软垫(302)的内侧,所述弹簧(305)固定连接在圆形槽口(303)内腔的底部,所述弹簧(305)与减震板(301)固定连接,所述连接块(306)固定连接在弹簧(305)的顶部,所述阻尼器(304)活动连接在弹簧(305)的内侧,所述阻尼器(304)分别与减震板(301)和连接块(306)活动连接。
5.根据权利要求1所述的轻便负压行走机器人,其特征在于:所述移动机构(4)包括连接柱(401)、活动柱(402)、支架框(403)、限位柱(404)、限位螺栓(405)、脚轮(406)和皮带(407),所述连接柱(401)固定安装在机器人本体(1)底部的外侧,所述活动柱(402)活动连接在连接柱(401)的表面,所述支架框(403)固定连接在活动柱(402)的外侧。
6.根据权利要求5所述的轻便负压行走机器人,其特征在于:所述限位柱(404)活动连接在活动柱(402)外侧,所述限位螺栓(405)螺纹连接在限位柱(404)的外侧,所述限位螺栓(405)与连接柱(401)固定且螺纹连接,所述脚轮(406)固定安装在支架框(403)的外侧,所述皮带(407)套设在脚轮(406)的外侧。
7.根据权利要求4所述的轻便负压行走机器人,其特征在于:所述连接块(306)的顶部固定安装有放置箱(7),所述机器人本体(1)的内侧固定连接有隔板(11),所述隔板(11)的外侧固定连接有矩形板(10),所述矩形板(10)与机器人本体(1)固定连接。
技术总结
本技术公开了轻便负压行走机器人,涉及机器人技术领域,包括机器人本体、轻便机构、负压机构和移动机构,所述轻便机构包括固定板、活动吸盘、支撑杆、固定杆、固定支架、支撑架、支架杆、橡皮套、放置板、电动伸缩杆、放置杆和活动卡扣,所述固定板固定安装在机器人本体的底部,所述活动吸盘固定连接在固定板的顶部,所述支撑杆活动连接在活动吸盘的顶部,所述固定杆固定连接在支撑杆的顶部,所述固定支架固定连接在固定杆的顶部。该轻便负压行走机器人,通过设置轻便机构,可以有效地实现装置在使用过程中具备提高机器人本体的灵活性和携带便利性的功能,通过支架杆和橡皮套易于便于使用者的拉动和操作。
技术研发人员:王立,孙宾,李合新
受保护的技术使用者:长春艾希技术有限公司
技术研发日:20230908
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!