一种远程遥控型新能源电站智能巡检设备的制作方法
本发明涉及电站巡检设备,尤其涉及一种远程遥控型新能源电站智能巡检设备。
背景技术:
1、常规能源是指技术上比较成熟且已被大规模利用的能源,而新能源通常是指尚未大规模利用、正在积极研究开发的能源。因此,煤、石油、天然气以及大中型水电都被看作常规能源,而把太阳能、风能、现代生物质能、地热能、海洋能以及氢能等作为新能源,由于传统能源的不可再生性,因此新能源的利用也成为各个国家普遍发展的方向,故而新能源电站的数量也越来越多,电站在日常的维护过程中,需要定期的进行选件,而随着科技的进步,通过机器人巡检也代替了人工的巡检,既可以大幅度地降低工作人员的工作量,同时可以有效地提高巡检效率。
2、机器人在巡检时,通过工作人员的远程操作,即可操作机器人行走,机器人通过搭载的云台、雷达和天线等设备接收信号,并进行录像等工作,进而进行巡检工作,但是由于巡检时并没有工作人员现场操作,而电站一般都是在户外,因此电站的环境复杂,机器人在巡检时,如果压到障碍物,或者被障碍物托底,而工作人员没有及时发现的情况下,机器人的持续行走挤压造成机器人被顶起过高造成倾倒,而倾倒之后极容易造成机器人上装载的设备的损坏,同时还需要人工来处理,增加了工作人员的工作量;另外,如果因为机器人通过窄路或者因为工作人员操作不当,使得机器人倒下时,如果在雨雪天气后积水或者在路旁有深坑,极易造成机器人上装载的设备进水或者被摔坏,造成很大的经济损失。
技术实现思路
1、本发明的目的在于提供一种远程遥控型新能源电站智能巡检设备,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
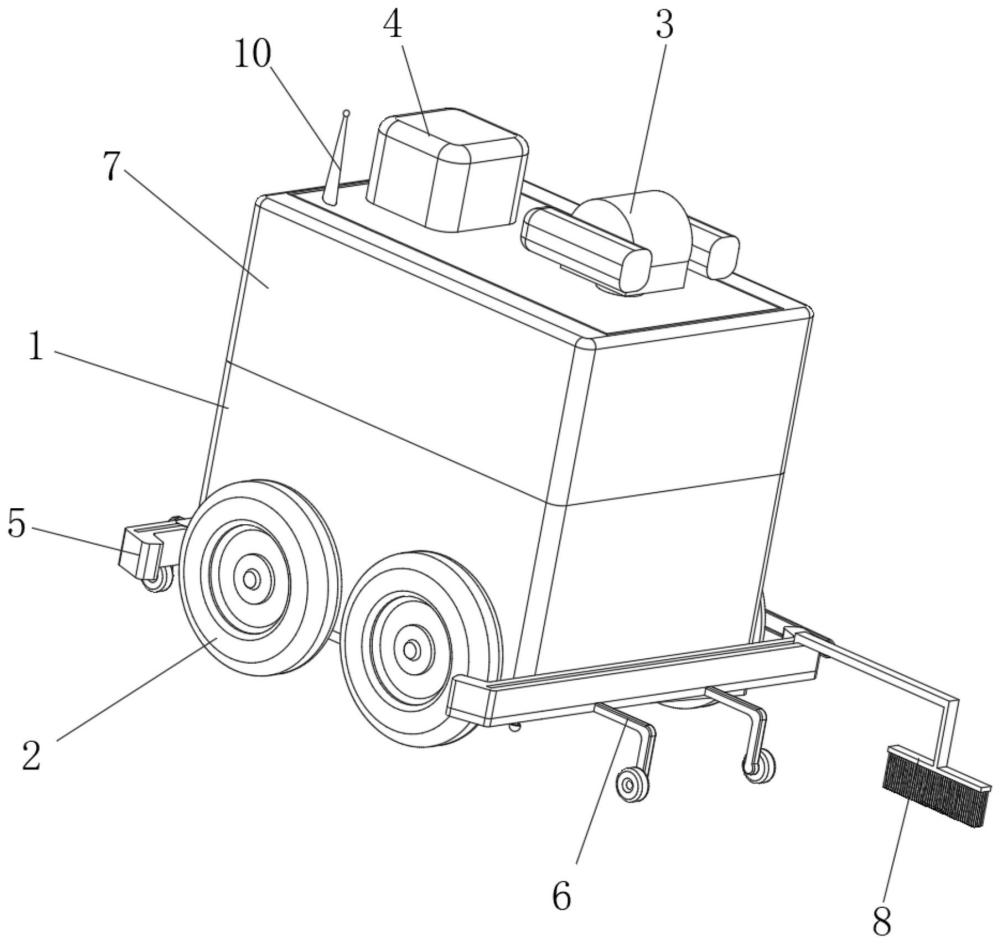
3、一种远程遥控型新能源电站智能巡检设备,其包括遥控机器人,所述遥控机器人的两侧均安装有两个行走轮,所述遥控机器人的顶侧安装有云台和雷达以及天线,所述遥控机器人与行走轮相邻的两侧均安装有防撞梁;
4、还包括被动支撑装置,所述被动支撑装置安装在所述遥控机器人的底侧上,所述被动支撑装置用于支撑所述遥控机器人;所述被动支撑装置包括两个支撑条,两个所述支撑条分别活动安装在所述遥控机器人的头部和尾部上,所述支撑条伸出用于支撑所述遥控机器人,所述支撑条上安装有两个支撑架,所述支撑架上转动安装有辅助轮;
5、还包括倾倒保护装置,所述倾倒保护装置安装在所述遥控机器人的顶侧上,所述倾倒保护装置用于在所述遥控机器人倾倒时保护所述云台和所述雷达以及所述天线;所述倾倒保护装置包括保护箱,所述保护箱安装在所述遥控机器人的顶侧上,所述保护箱的顶侧为开口设置,并通过多个铰链转动安装有支撑板,所述云台和所述雷达以及所述天线均安装在所述支撑板上,所述保护箱的一侧内壁上安装有密封气囊,所述密封气囊用于密封所述保护箱;
6、还包括主动驱动装置,所述主动驱动装置与所述被动支撑装置传动连接,所述主动驱动装置用于驱动所述被动支撑装置展开。
7、进一步地,在本发明较佳实施例中,所述被动支撑装置还包括两个摆动杆,两个所述摆动杆均转动安装在所述遥控机器人的底侧上,两个所述摆动杆上均转动安装有撑开轴,两个所述支撑条上均开设有撑开槽,两个所述撑开轴分别活动安装在两个所述撑开槽内,所述遥控机器人的底侧转动安装有两个转动柱,两个所述摆动杆分别安装在两个所述转动柱上;
8、所述遥控机器人的两侧均开设有两个推拉槽,所述推拉槽内活动安装有推拉杆,所述推拉杆安装在所述支撑条上。
9、进一步地,在本发明较佳实施例中,所述遥控机器人的底侧活动安装有两个挤压杆,所述挤压杆的一侧安装有滚动轮,所述挤压杆上安装有带动杆;
10、所述转动柱上弧形开设有带动槽,所述带动杆的一端延伸至所述带动槽内,所述挤压杆移动驱动所述带动杆在带动槽内移动,挤压所述转动柱转动。
11、进一步地,在本发明较佳实施例中,所述遥控机器人的底侧开设有两个挤压槽,两个所述挤压杆分别活动安装在两个所述挤压槽内;
12、所述挤压槽的顶侧内壁上安装有挤压弹簧,所述挤压弹簧的底端安装在所述挤压杆的顶端上。
13、进一步地,在本发明较佳实施例中,所述主动驱动装置包括两个齿轮,两个所述齿轮分别套接在两个所述转动柱上,两个所述齿轮上均啮合有齿条,两个所述齿条上连接有连接架;
14、所述遥控机器人的底侧安装有气缸,所述气缸的输出轴上连接有伸缩杆,所述伸缩杆安装在所述连接架上。
15、进一步地,在本发明较佳实施例中,所述遥控机器人的底侧上开设有两个安装槽,两个所述转动柱分别转动安装在两个所述安装槽内;
16、所述转动柱上套接有扭簧,所述扭簧的一端安装在所述安装槽的内壁上,所述扭簧的另一端安装在所述安装槽的内壁上。
17、进一步地,在本发明较佳实施例中,所述倾倒保护装置还包括顶升架,所述顶升架活动安装在所述遥控机器人内,所述顶升架用于支撑所述支撑板,所述密封气囊的底侧安装有拉绳,所述拉绳连接在所述顶升架上;
18、所述顶升架上转动安装有移动轮,所述顶升架通过所述移动轮行走。
19、进一步地,在本发明较佳实施例中,所述保护箱的内壁上开设有移动槽,所述顶升架滑动安装在所述移动槽内;
20、所述移动槽的底侧内壁上安装有拉动弹簧,所述拉动弹簧的顶端安装在所述顶升架的底侧上。
21、进一步地,在本发明较佳实施例中,还包括清理装置,所述清理装置安装在所述遥控机器人的头部,所述清理装置用于清理地面的杂质;
22、所述清理装置包括清理架,所述清理架滑动安装在所述防撞梁上,所述清理架的底侧设有密集的刷毛,所述清理架往复移动,驱动密集的所述刷毛对地面进行清扫。
23、进一步地,在本发明较佳实施例中,所述防撞梁的顶侧开设有滑槽,所述清理架滑动安装在所述滑槽内,所述滑槽内转动安装有驱动柱,驱动柱的一端延伸至所述防撞梁外,所述清理架上开设有驱动孔,所述驱动柱穿过所述驱动孔,所述驱动柱的外表面环形倾斜的开设有驱动槽,所述驱动孔的内壁上安装有弧形的驱动块,所述驱动块位于所述驱动槽内;
24、靠近所述清理架的一个所述行走轮的轮轴上安装有动力杆,所述动力杆与所述驱动柱上均安装有皮带轮,两个所述皮带轮上套接有皮带。
25、本发明提出的一种远程遥控型新能源电站智能巡检设备的有益效果是:
26、在本发明中,通过被动支撑装置和主动驱动装置的设置,在遥控机器人遇到障碍物,使得行走轮大幅度的翘起或者遥控机器人被托底并且幅度较大时,继而使得挤压杆脱离地面时,挤压弹簧带动挤压杆下移,挤压杆通过带动杆在带动槽内移动,进而使得转动柱带动摆动杆转动,使得支撑条展开,对遥控机器人进行支撑,同时在远程控制遥控机器人时,如果操作人员发现因为道路狭窄之类的原因造成无法躲避的障碍时,可以主动启动气缸,进而使得两个支撑条展开进行支撑,起到主动支撑的作用。
27、进一步地,在本发明中,通过倾倒保护装置的设置,遥控机器人因为碰撞,或者因为操作不当倾倒时,使得顶升架脱离支撑板,在云台和雷达以及天线等设备的重力作用下,使得支撑板转动将多个设备收纳进保护箱内进行保护,同时顶升架拉掉拉绳,使得密封气囊快速打开,将保护箱的顶侧进行密封,既可以对云台和雷达以及天线等设备进行缓冲保护,同时可以避免进水之类的问题,有效地保护设备的安全。
28、更进一步地,在本发明中,通过清理装置的设置,遥控机器人通过行走轮行走,进而使得清理架往复移动,清理架通过密集的刷毛对地面进行清扫,将遥控机器人行走的路面清理干净,保证遥控机器人的正常行走。
- 还没有人留言评论。精彩留言会获得点赞!