一种双形态机器人足部装置
本发明属于机器人,尤其涉及一种双形态机器人足部装置。
背景技术:
1、目前,国内外对于机器人的足部研究还未集中于足部运动方式的变化,其主要还是单一的足式结构或者轮式结构,其中较为有代表性的有1986年美国麻省理工学院腿型机器人实验室的raiberta教授设计的世界上第一个以跳跃方式运动的单腿机器人。该单腿机器人的运动被限制在一个平面内,腿部装有汽缸,作用相当于弹簧,它在地面上的运动类似于一个带弹簧的倒立摆。其足部为一个无法转动的防滑球。与此类似的还有波士顿动力公司开发的机械狗spotmini,其足部也为类似的防滑圆弧面的球体结构。除此之外,还有以仿造人类的的片平足结构为代表的日本asimo机器人和美国麻省理工学院开发的domo机器人足部结构。而轮式足部结构一般在机器人实际应用中较为少见。
2、而针对野外和发生自然灾害地区的复杂地形情况,设计一种将轮式和足式两种足部结构结合起来,能够使救援机器人根据不同的地形条件来实时选择运动方式,达到更快的运动速度的新型机器人足部装置就显得十分有必要。
技术实现思路
1、本发明实施例的目的在于提供一种双形态机器人足部装置,旨在解决上述背景技术中提出的问题。
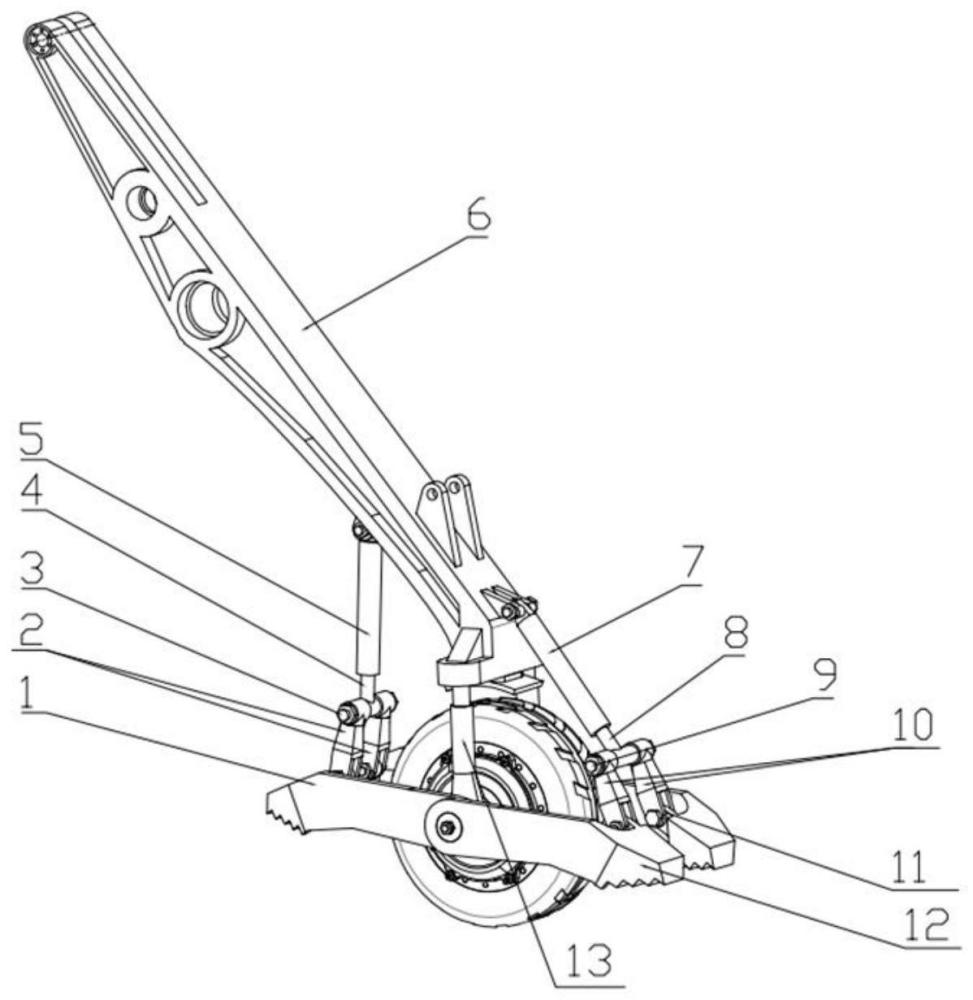
2、本发明实施例是这样实现的,一种双形态机器人足部装置,包括足骨杆,还包括:
3、轮式移动模块,所述轮式移动模块包括设置于足骨杆底部的主轴,所述主轴上转动安装有电动轮,所述电动轮上安装有轮胎,且所述足骨杆的底部还设置有用于对电动轮进行止转的液压刹车片;
4、足式移动模块,所述足式移动模块包括转动安装于主轴同一端的左前爪和左后爪,以及转动安装于主轴的另一端的右前爪和右后爪,所述足骨杆上还设置有第一伸缩件和第二伸缩件,所述第一伸缩件的伸缩端连接有两个后连接杆,且两个所述后连接杆分别与左后爪和右后爪连接,所述第二伸缩件的伸缩端连接有两个前连接杆,且两个所述前连接杆分别与左前爪和右前爪连接。
5、进一步的技术方案,所述足骨杆的底部还设置有第一避震杆缸体和第二避震杆缸体,所述第一避震杆缸体和第二避震杆缸体对称设置于电动轮的两侧,且所述主轴的两端通过第一避震杆缸体和第二避震杆缸体与足骨杆连接。
6、进一步的技术方案,所述第一伸缩件包括铰接于足骨杆上的后液压缸体,所述后液压缸体中安装有后液压杆,所述后液压杆通过后双头螺柱与两个后连接杆连接。
7、进一步的技术方案,所述第二伸缩件包括铰接于足骨杆上的前液压缸体,所述前液压缸体中安装有前液压杆,所述前液压杆通过前双头螺柱与两个前连接杆连接。
8、进一步的技术方案,所述主轴的两端均设置有挡片,用于防止左前爪、右前爪、左后爪以及右后爪从主轴上脱落,提升装置的稳定性,延长装置的使用寿命。
9、进一步的技术方案,所述左前爪、右前爪、左后爪以及右后爪远离主轴的一端(及各部件与地面接触的一端)均设置有若干凸起。
10、本发明实施例提供的一种双形态机器人足部装置,该装置的机械结构简单,将该装置应用于机器人上之后,通过可切换的运动方式,根据不同地形更换运动方式,可使得机器人在不同环境下进行快速移动,有效提升了机器人对各种地形的适应能力。
技术特征:
1.一种双形态机器人足部装置,包括足骨杆,其特征在于,还包括:
2.根据权利要求1所述的双形态机器人足部装置,其特征在于,所述足骨杆的底部还设置有第一避震杆缸体和第二避震杆缸体,所述第一避震杆缸体和第二避震杆缸体对称设置于电动轮的两侧,且所述主轴的两端通过第一避震杆缸体和第二避震杆缸体与足骨杆连接。
3.根据权利要求1所述的双形态机器人足部装置,其特征在于,所述第一伸缩件包括铰接于足骨杆上的后液压缸体,所述后液压缸体中安装有后液压杆,所述后液压杆通过后双头螺柱与两个后连接杆连接。
4.根据权利要求3所述的双形态机器人足部装置,其特征在于,所述第二伸缩件包括铰接于足骨杆上的前液压缸体,所述前液压缸体中安装有前液压杆,所述前液压杆通过前双头螺柱与两个前连接杆连接。
5.根据权利要求1所述的双形态机器人足部装置,其特征在于,所述主轴的两端均设置有挡片。
6.根据权利要求1所述的双形态机器人足部装置,其特征在于,所述左前爪、右前爪、左后爪以及右后爪远离主轴的一端均设置有若干凸起。
技术总结
本发明适用于机器人技术领域,提供了一种双形态机器人足部装置,包括足骨杆,还包括:轮式移动模块,所述轮式移动模块包括设置于足骨杆底部的主轴,所述主轴上转动安装有电动轮,所述电动轮上安装有轮胎;足式移动模块,所述足式移动模块包括左前爪和左后爪,以及右前爪和右后爪,所述足骨杆上还设置有第一伸缩件和第二伸缩件,所述第一伸缩件通过两个后连接杆与左后爪和右后爪连接,所述第二伸缩件通过两个前连接杆与左前爪和右前爪连接。该装置的机械结构简单,将该装置应用于机器人上之后,通过可切换的运动方式,根据不同地形更换运动方式,可使得机器人在不同环境下进行快速移动,有效提升了机器人对各种地形的适应能力。
技术研发人员:罗彦茹,衣丰昊,朱先勇,肖雄
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!