一种基于多声学设备协同作业的坝面检测水下机器人系统的制作方法
1.本发明涉及水利工程机器人领域,更具体地说,它涉及一种水下结构物检测水下机器人系统。
背景技术:
2.国内水库大坝建造时间较早,多年来解决了广大百姓对于水源的合理利用需求,大坝建成后在水力的长期作用下,坝体容易出现破损、裂缝等现象,特别是金属结构部分,锈蚀程度较严重,水面上的部分,检测相对容易,但水下部分不易发现,传统的蛙人水下检查,只能对关键部分进行排查,受制于下潜时间和下潜深度,并且危险系数极高,难以对水库大范围区域进行健康检查。
3.传统检测方法,检测效率低、费用高、安全性低,加之使用年限长,可预见的问题得不到有效评估,为解决坝体水下部分检测的这些问题,借助智能设备实现大坝检测的需求越来越迫切。
4.现阶段,也有一些水下检测设备搭载图像采集系统,潜入水中进行检测,虽然一定程度上解决人工检测遇到的问题,但由于水下环境复杂,仍需要操作员长时间操控,并且视觉图像效果只能粗略评估健康状态,对于精细测量和整体情况评估也不能提供充分的数据信息。
5.随着科技的快速发展,之前昂贵且不成熟的技术,经过深入研究,加快了产品商业化的进程,其中,用于水下勘测的声呐设备也逐渐被广泛使用,针对不同的作业场景,可选择的设备类型也越来越多,在水下检测领域上能够弥补单纯依赖图像采集设备,功能单一、精确度不高、评估不完整的短板。
6.因此,需要一种新的水下检测系统,实现高效的坝体安全自动化检测。
技术实现要素:
7.针对现有技术存在的不足,本发明的目的在于提供一种基于多声学设备协同作业的坝面检测水下机器人系统,通过水下声学定位设备、水下声学探测设备与水下机器人的集成应用设计,达到水下检测机器人对水库大坝水下部分自主详尽勘察的目的。
8.本发明采用的技术方案是:一种基于多声学设备协同作业的坝面检测水下机器人系统,它包括水下声学定位设备、主控舱、连接于主控舱的电池舱、安装于主控舱及电池舱的水下推进器、连接于主控舱与电池舱的水下机器人机身架、安装于水下机器人机身架的水下声学探测设备;所述水下声学定位设备包括安装于水下机器人浮力面板的水下声学定位发声装置和连接于岸基控制台并布放于水中的水下声学定位收声装置;所述水下声学定位设备和水下声学探测设备均为模块化设计,且二者均具有完备的浮力状态;所述电池舱内设有储能模块;所述主控舱、电池舱的舱体外形均为流线圆柱形设计。
9.多声学设备协同作业需要水下机器人搭载水下声学定位设备和水下声学探测设备,并要求二者相互配合工作,水下声学定位设备和水下声学探测设备对于水下机器人而
言,属于外扩设备,在挂载外扩设备前,水下机器人本身已经具有完备的浮力状态,挂载后,外扩设备自身重量会影响水下机器人的浮力状态,故本发明采用将声学定位设备和声学探测设备的设备用电、数据传输接口和设备安装结构独立为可拆解的功能模块,每个模块具有符合自身重量的浮力平衡状态,以便于携带和组装集成,使得水下机器人具有理想的浮力状态和运动控制效果。
10.本发明进一步设置为:所述水下声学定位设备和水下声学探测设备均为模块化设计,且二者均具有完备的浮力状态。
11.主控舱内设有供电模块和数据传输模块,主控舱接口部分,专设有连接于水下声学定位发声装置和水下声学探测设备的供电及数据传输接口。接口处均采用线机分离的水密插接方式,并且二者接插件采用防误插设计,避免接错线材导致设备损坏的问题。
12.本发明进一步设置为:所述水下声学定位设备和水下声学探测设备协同作业分为软、硬件两部分。
13.水下声学定位设备分为软件和硬件组件两部分,硬件组件又分为两部分:水下声学定位收声装置和水下声学定位发声装置。水下声学定位收声装置需要在岸基控制台附近按固定方式排布,水下声学定位发声装置安装于水下机器人。软件实现水下机器人的任务规划和运动位置监控。
14.水下声学探测设备分为软件和硬件组件两部分。硬件组件集成于水下机器人,调整扫描参数,设定固定的扫描方式,配合任务调度进行坝面结构的扫描。软件实现成像效果展示。
15.可以从建筑图纸中得出检测目标的结构,通过预设运行行程的方式,保证水下机器人既能通过岸基控制台完成水下机器人的控制功能,又能依靠水下机器人本体自带控制器,结合水下声学定位设备完成运动任务调度,执行相应水域的水下坝面声学检测作业任务。
16.本发明进一步设置为:所述水下声学定位发声装置,安装于水下机器人的机体前端上部。
17.在坝面检测过程中,实际作业的水域一般较为开阔,将水下声学定位发声装置布置于机器人前方上部,更易于声波传输,便于收声装置接收,在水下机器人自主运动,按规定路线执行动作时,要求整个机器人的位置数据和控制指令传输具有较高的实时性和准确性,这样水下机器人执行水下作业任务时会综合传回的信息进行判断后进行精确控制。
18.本发明进一步设置为:所述水下声学定位收声装置,包括声头、主固定块、连接于主固定块的伸缩固定架、和便于固定水下声学定位收声装置线材的安装结构。
19.水下声学定位收声装置设有若干个声头,一般为4个,需要按排布规则布置于不同深度、不同位置,分别固定若干个声头的对应若干根伸缩固定架同样遵循模块化设计规则,采用呈角度不同方向插接式设计,伸缩固定架分别接插于主固定块,并且在伸缩固定架的顶部设有易于固定声头线材的绑定结构,在有水流波动的情况下,仍能保持固定的位置,为精确定位水下机器人的位置、精确控制水下机器人运动提供保证。
20.本发明进一步设置为:所述伸缩固定架可调整水下声学定位收声装置声头的间距;所述伸缩固定架伸缩固定架包括伸缩节及伸缩锁紧槽,每个伸缩固定架设有若干根长度相同但粗细不同的伸缩节,粗细不同的伸缩节为一级一级嵌套结构,每段伸缩节的结构
外形由尾部到头部也呈现由粗到细的变化,伸缩节的固定方式与传统的螺丝锁紧结构不同,每节头部开设有锁紧槽,通过旋转即可卡紧。
21.伸缩固定架分别可朝不同方向伸展,在水下声学定位设备额定的检测范围内,在不同的水域情况下,水下声学定位收声装置声头的布局结构会对位置计算产生影响,使水下声学定位收声装置声头位置差异性越大,计算出的位置越精确,各个方向的伸缩固定架均为垂直设置,这样在伸展后会保证有最大的差异性。
22.水下机器人在进行工作前,可以通过伸缩固定架调节水下声学定位收声装置声头之间的间距,从而收声声头位置差异性发生改变,以适应不同检测环境;
23.本发明进一步设置为:所述水下推进器包括若干个朝向不同方向推进的推进器,保证在依靠水下声学定位设备进行运动控制时,具有灵活的运动控制效果;保证在需要水下声学探测设备进行扫描勘测过程中能够稳定在一处,保证良好的成像扫描效果。
24.所述推进器沿不同方向分为若干个升降推动器、若干个水平推动器,推进器功耗低,推力大,在长时间运行过程中节省能源。推进器动力充足且分布结构合理,机器人可以完成前进、后退、上浮、下潜、左右偏转和左右平移等动作,从而达到具有足够动力且灵活运动的目的。
25.本发明进一步设置为:所述水下声学探测设备指的是三维成像声呐,该设备通过浮力外壳、三维成像声呐底部隔板及固定螺柱组成的连接结构,安装于水下机器人底部;
26.浮力外壳内部形状与三维成像声呐外形匹配,恰将三维成像声呐包裹住,节省了空间,且外观简洁。在浮力外壳及三维成像声呐底部隔板上设有相对应的三维成像声呐固定孔,通过螺栓将三维成像声呐固定于三维成像声呐底部隔板,再将组合好的三维成像声呐、浮力外壳及三维成像声呐底部隔板通过三维成像声呐固定螺柱连接于水下机器人机身架底板。
27.本发明进一步设置为:所述三维成像声呐与水下机器人的连接结构采用与水下机器人机身架底板契合的下沉式链接设计。
28.水下机器人机身架和三维成像声呐底部隔板均采用高分子材料,具有高强度、耐磨等优点,三维成像声呐底部隔板设计成与水下机器人机身架底板相匹配的形状,水下机器人机身架底板和三维成像声呐底部隔板四周分别布置有若干个不锈钢固定螺柱,该固定螺柱为双头螺纹锁紧结构,将水下机器人机身架底板和三维成像声呐底部隔板对接后锁紧,以保证连接强度及稳定性。
29.综上所述,本发明具有以下有益效果:
30.其一,通过水下声学定位发声装置和水下声学定位收声装置的集成结构设计,使得可以通过声学定位,进行水下机器人的任务调度和位置监控。
31.其二,通过水下声学探测设备的集成结构设计,得以实现与水下定位声学设备配合工作,进行坝面扫描勘测。
附图说明
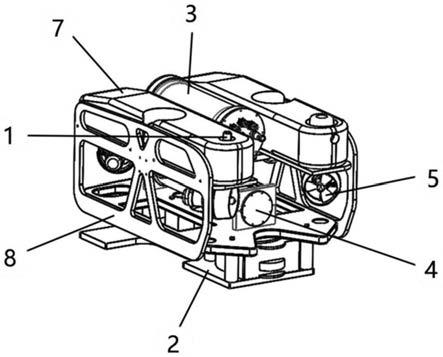
32.图1为本发明的结构示意图;
33.图2为水下声学定位收声装置的结构示意图;
34.图3为水下声学定位收声装置的主固定块的结构示意图;
35.图4为水下声学定位收声装置的伸缩固定架与主固定块的连接结构示意图;
36.图5为水下声学定位收声装置的声头固定结构示意图;
37.图6为水下声学探测设备的安装结构示意图。
38.图中:1、水下声学定位发声装置;2、水下声学探测设备;21、三维成像声呐;22、三维成像声呐固定孔;23、三维成像声呐固定螺柱;24、水下机器人机身架底板;25、三维成像声呐底部隔板;26、浮力外壳;3、主控舱;4、电池舱;5、水下推进器;6、水下声学定位收声装置;61、主固定块;611、主固定块与伸缩固定架连接孔;612、伸缩固定架固定孔;613、伸缩固定架顶紧螺栓;62、伸缩固定架;621、伸缩锁紧槽;622、伸缩节;623、声头;624、声头固定结构;7、水下机器人浮力面板;8、水下机器人机身架。
具体实施方式
39.下面结合附图和实施例,对本发明进行详细描述。
40.如图1所示,本发明一种基于多声学设备协同作业的坝面检测水下机器人系统,包括主控舱3、连接于主控舱3的电池舱4、安装于水下机器人浮力面板7的水下声学定位发声装置1、安装于主控舱3及电池舱4的水下推进器5、连接主控舱3与电池舱4的水下机器人机身架8、安装于水下机器人机身架8的水下声学探测设备2,其中电池舱4内设有储能模块,其中储能模块为电池组。
41.如图2所示,水下声学定位收声装置6包括伸缩固定架62和连接4个伸缩固定架62的主固定块61,伸缩固定架62包含伸缩节622及伸缩锁紧槽621,伸缩固定架62由5节伸缩节622构成,每两个伸缩节622之间均设有一个伸缩锁紧槽621,伸缩固定架62从根部到头部,由粗逐节变细,伸长时,逆时针旋转伸缩节622,旋到不能继续时停止,此时即可向外用力拉出伸缩节622,拉至最长后,需要反方向旋紧伸缩节622,长度最长时为5节同时展开,展开并旋紧后,由于有螺纹结构式的伸缩锁紧槽621,则不会由于外力而导致其承力缩回。
42.如图3、图4所示,主固定块61在不同方向均设有主固定块与伸缩固定架连接孔611,伸缩固定架固定孔612,将各伸缩固定架62插入主固定块61后,通过伸缩固定架顶紧螺栓613穿过伸缩固定架固定孔612,将伸缩固定架62根部顶紧,每个伸缩固定架62的两侧均设有伸缩固定架固定孔612,且伸缩固定架固定孔612为螺纹孔,故旋紧后即可固定。
43.如图5所示,伸缩固定架62头部为圆环形声头固定结构624,其上设有螺纹结构,与水下声学定位收声装置6的声头623上的螺纹相匹配,旋紧后即实现固定。
44.如图6所示,三维成像声呐固定螺柱23,三维成像声呐21,三维成像声呐底部隔板25,均为可拆结构,组装好连接到水下机器人机身架底板24。
45.三维成像声呐21位于水下机器人机身架底板24与三维成像声呐底部隔板25之间,包裹在浮力外壳26内部,高度适中,通过三维成像声呐固定孔22和螺栓将三维成像声呐21、浮力外壳26、三维成像声呐底部隔板25固定组成整体,再通过8个三维成像声呐固定螺柱23与水下机器人机身架底板24连接固定。
46.一种基于多声学设备协同作业的坝面检测水下机器人系统还包括设置于水面上的岸基控制台,岸基控制台通过零浮力线缆与水下机器人连接。
47.岸基控制台,包括水下机器人无线遥控终端、无线收发模块、水下机器人参数信息显示终端、定位模块路径规划及运动状态展示终端和三维成像声呐图像显示终端;
48.通过水下机器人无线遥控终端实现水下机器人运动操控,水下机器人挂载水下声学定位设备和水下声学探测设备2,三者以水下一体方式进行作业;
49.通过无线收发模块实现定位数据信息传输,水下声学定位设备在发声与收声正常通讯过程中,会实时计算当前水下机器人的位置,为水下机器人的运动提供依据;
50.水下机器人参数信息显示终端负责实时监控水下机器人及各传感器、各挂载设备的状态,作为多声学设备协同作业的载体,需要实时监测其工作状态,保证作业的稳定性;
51.水下声学定位设备路径规划及运动状态展示终端实现水下机器人自主运动任务调度及实时位置监控,通过终端上下发作业任务规划的路径,进而使水下机器人按指定路线进行运动,通过终端,可实时判断水下机器人是否偏离预设轨道;
52.水下声学探测设备三维成像声呐图像显示终端,通过物理的网络通讯接口,进行连接,以保证数据传输的稳定性,通过三维成像声呐21返回的图像数据,可精确评估坝面表面完整程度;
53.工作过程:
54.(1)根据不同水域情况,评估实际作业难度,布置水下声学定位收声装置6;
55.(2)规划作业路线,下发规划路径;
56.(3)设定水下声学探测设备2的三维成像声呐21的扫描参数;
57.(4)对坝面进行分段检测,根据三维成像声呐21的扫描范围,反复调整参数,调度水下机器人运动及三维成像声呐21扫描的启停。
58.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的未具创造性的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1