一种水下视频图像采集机器人的制作方法
1.本实用新型涉及水下视频图像采集技术领域,尤其涉及一种水下视频图像采集机器人。
背景技术:
2.在工业和人民生活的领域中,很多场合会需要进行水下视频图像采集。现有技术中,对于水下图像的采集一般采用直接将摄像头安装在牵引绳一端后、将牵引绳放入目标区域的方法,在这个过程中,对于摄像头的位置无法很好的调节,常常导致位置产生偏离,进而导致后续对实际异常点的处置无法完成,耗费时间和人力成本。进一步来说,在不同密度的水中工作时,水下视频图像采集装置受到的浮力不同,会导致其运动不够平稳,使得水下视频图像的采集质量较低。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的在于提供一种水下视频图像采集机器人,能够灵活的进行水下视频图像采集功能,并提高水下视频图像的采集质量。
4.本实用新型采用如下技术方案实现:一种水下视频图像采集机器人,包括中间外壳体、连接在中间外壳体前端的透明摄像舱和连接在中间外壳体后端的舱尾,所述中间外壳体的前部及后部对称设置有四个竖直推进组件,所述舱尾的后端左右对称设置有两个水平推进组件,所述摄像舱内安装有视频图像采集组件,所述中间外壳体的顶端安装有导线连接头,所述中间外壳体的底端可拆卸的安装有浮力舱组件。
5.进一步地,所述视频图像采集组件包括自适应云台、补光灯安装盘、补光灯和摄像机,所述自适应云台安装在摄像舱顶端,所述摄像机安装在自适应云台的驱动端,所述自适应云台的驱动端位于摄像机的后侧外圈还设置有一个补光灯安装盘,所述补光灯安装盘前端等角度间隔安装有一圈补光灯。
6.进一步地,所述竖直推进组件包括竖直推进电机、第一螺旋桨、竖直推进电机固定座、通道和通道壁,所述中间外壳体的前部及后部对称设置有四个通道壁,通道壁内竖直形成有通道,每个通道内均安装有竖直推进电机固定座,竖直推进电机固定座上安装有竖直推进电机,竖直推进电机的驱动端安装有第一螺旋桨。
7.进一步地,所述水平推进组件包括水平推进电机、第二螺旋桨和螺旋桨保护罩,所述水平推进电机安装在舱尾内,所述第二螺旋桨安装在水平推进电机的驱动端,所述螺旋桨保护罩固定在舱尾的后端,螺旋桨保护罩套设在第二螺旋桨外侧。
8.进一步地,所述浮力舱组件包括快速连接头、浮力舱连接柱、浮力舱、舱口和舱口盖,所述中间外壳体的底端对称安装有快速连接头,所述浮力舱的顶端对称设置有浮力舱连接柱,所述浮力舱连接柱与快速连接头之间可拆卸连接,所述浮力舱的顶端设置有舱口,所述舱口上安装有舱口盖。
9.进一步地,所述中间外壳体内设置有中间内壳体,所述中间内壳体包括电控系统,
所述电控系统包括控制电路和蓄电池。
10.相比现有技术,本实用新型的有益效果在于:
11.1.本实用新型的水下视频图像采集机器人利用竖直推进电机驱动第一螺旋桨,实现升降及垂直方向的翻转运动,利用水平推进电机驱动第二螺旋桨,实现前后及水平方向的转向运动,运动灵活,在其运动中,自适应云台能够灵活的调节摄像机及一圈补光灯的位置,使得补光灯跟随摄像机保持稳定,更好的采集水下视频图像。
12.2.本实用新型的水下视频图像采集机器人在不同密度的水中进行工作时,可以根据需求选择是否配置浮力舱组件以及配置浮力舱组件的重量,保持运行稳定性,提高水下视频图像采集质量。
附图说明
13.图1是实施例1中本实用新型的结构示意图;
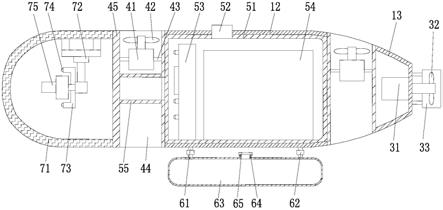
14.图2是实施例2中本实用新型的俯视图。
15.图中:3、水平推进组件;4、竖直推进组件;12、中间外壳体;13、舱尾;31、水平推进电机;32、第二螺旋桨;33、螺旋桨保护罩;41、竖直推进电机;42、第一螺旋桨;43、竖直推进电机固定座;44、通道;45、通道壁;51、中间内壳体;52、导线连接头;53、控制电路;54、蓄电池;61、快速连接头;62、浮力舱连接柱;63、浮力舱;64、舱口;65、舱口盖;71、摄像舱;72、自适应云台;73、补光灯安装盘;74、补光灯;75、摄像机。
具体实施方式
16.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
17.需要说明的是,本实用新型提供的一种水下视频图像采集机器人是对设备及电路构造进行的改进,对于本实用新型所涉及的如何输出信号、接收信号、监测信号、传输信号等方法并不是本实用新型所要保护的内容,其均可以通过现有的技术实现。
18.实施例1
19.如图1、图2所示,本实用新型的一种水下视频图像采集机器人,包括中间外壳体12、连接在中间外壳体12前端的透明摄像舱71和连接在中间外壳体12后端的舱尾13,中间外壳体12的前部及后部对称设置有四个竖直推进组件4,所述舱尾13的后端左右对称设置有两个水平推进组件3,摄像舱71内安装有视频图像采集组件,中间外壳体12的顶端安装有导线连接头52,中间外壳体12的底端可拆卸的安装有浮力舱组件。具体地,其中的视频图像采集组件包括自适应云台72、补光灯安装盘73、补光灯74和摄像机75,自适应云台72安装在摄像舱71顶端,摄像机75安装在自适应云台72的驱动端,自适应云台72的驱动端位于摄像机75的后侧外圈还设置有一个补光灯安装盘73,补光灯安装盘73前端等角度间隔安装有一圈补光灯74。自适应云台72使用现有技术中逸景品牌的三轴自适应云台,能够灵活的调节摄像机75及一圈补光灯74的位置,更好的采集水下视频图像,同时使得补光灯74跟随摄像
机75的运动,更好的提供补光。
20.竖直推进组件4包括竖直推进电机41、第一螺旋桨42、竖直推进电机固定座43、通道44和通道壁45,中间外壳体12的前部及后部对称设置有四个通道壁45,通道壁45内竖直形成有通道44,每个通道44内均安装有竖直推进电机固定座43,竖直推进电机固定座43上安装有竖直推进电机41,竖直推进电机41的驱动端安装有第一螺旋桨42。水平推进组件3包括水平推进电机31、第二螺旋桨32和螺旋桨保护罩33,水平推进电机31安装在舱尾13内,所述第二螺旋桨32安装在水平推进电机31的驱动端,所述螺旋桨保护罩33固定在舱尾13的后端,螺旋桨保护罩33套设在第二螺旋桨32外侧。水平推进电机31、竖直推进电机41均使用现有技术中的水下电机,其能够在水中工作,不需要在电机外安装密封壳体。四个竖直推进电机41用于驱动第一螺旋桨42旋转,带动本实用新型升降及垂直方向的翻转运动,两个水平推进电机31驱动第二螺旋桨32旋转,用于带动本实用新型前后及水平方向的转向运动。中间外壳体12内设置有中间内壳体51,中间内壳体51包括电控系统,电控系统包括控制电路53和蓄电池54,控制电路53使用现有技术中的控制电路板,用于控制调节本实用新型的运动,控制电路53不是本实用新型所要保护的内容,其能够通过现有的技术实现,在本实施例中对其具体电路及功能不作累述。蓄电池54使用现有技术中的可充电储蓄电池,能够为本实用新型的电子器件提供电能。
21.实施例2
22.如图1至图2所示,本实用新型的一种水下视频图像采集机器人,其中的浮力舱组件包括快速连接头61、浮力舱连接柱62、浮力舱63、舱口64和舱口盖65,中间外壳体12的底端对称安装有快速连接头61,浮力舱63的顶端对称设置有浮力舱连接柱62,浮力舱连接柱62与快速连接头61之间可拆卸连接,快速连接头61使用现有技术中逸虎品牌的铜制螺纹连接头,通过手动旋转能够快速的实现浮力舱连接柱62与快速连接头61之间的连接及拆卸。浮力舱63的顶端设置有舱口64,舱口64上安装有舱口盖65,具体地,舱口盖65通过螺纹配合密封安装在舱口64上端。
23.在不同密度的水中进行工作时,可以根据需求选择是否配置浮力舱组件以及配置浮力舱组件的重量。浮力舱组件的重量能够通过向浮力舱63内添加的物质及物质的体积决定,在通常时候,向浮力舱63内添加一定体积的水液进行调节,在特殊情况下,可以向浮力舱63内添加金属滚珠,提高其重量,从而便于浮力舱组件进行重量调整,提高本实用新型的运行稳定性,提高水下视频图像采集质量。
24.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1