一种驱动单元模块化的双输出轴电动舵机
1.本发明属于水下航行器技术领域,具体涉及一种驱动单元模块化的双输出轴电动舵机。
背景技术:
2.在海洋事业快速发展、世界各国领海防卫意识不断强化的如今,水下航行器正朝着功能化、多元化的方向发展,为满足不同种类、不同功能水下航行器的舵控需求,对舵机提出了更高的要求。目前水下航行器多采用多个舵机共同控制航向,但由于目前多采用单台舵机控制单个舵面,且多台舵机间由于机械原因、通电原因、控制原因等难以做到完全同步。于此同时,传统舵机往往采用的是定制式壳体,只能匹配特定的驱动单元,当舵机的应用场合(如负载、供电环境等)发生变化时,舵机难以针对场景变化进行自身调节,应用范围有限。
3.因此,为满足现代水下航行器对多舵机的同步控制精度和多种环境适配性的要求,本发明提出一种驱动单元模块化的双输出轴电动舵机,该舵机具有双舵面同步控制精度高、可适应多种环境的特点。
技术实现要素:
4.本发明的目的是为解决多个舵机共同工作时难以实现同步运转、单台舵机无法应用于多种工作场合的问题,提出一种驱动单元模块化的双输出轴电动舵机,不仅可以通过一个舵机同时控制两个舵面,确保两个舵面动作的同步性,减少多舵同步运动的误差,同时还实现了驱动单元的模块化,可以根据实际需求更换不同性能的驱动单元,极大提高舵机的应用范围。
5.本发明的驱动单元模块化的双输出轴电动舵机,包括可替换驱动单元模块、滚珠丝杠机构、倒置曲柄滑块机构和双输出式连接轴;所述可替换驱动单元模块的输出端传动连接于滚珠丝杠机构的丝杆;所述滚珠丝杠机构的丝杠螺母用于带动倒置曲柄滑块机构的滑块往复直线运动;所述倒置曲柄滑块机构的摇臂连接于双输出式连接轴以驱动双输出式连接轴转动;所述双输出式连接轴的两端均设有舵板安装接口以带动两舵板同步动作;
6.进一步,所述可替换驱动单元的输出轴通过弹性联轴器传动连接于滚珠丝杠机构的丝杆;
7.进一步,所述弹性联轴器为可拆分式弹性联轴器,其输入端孔径可随驱动单元模块的转轴进行适应性调节;
8.进一步,所述舵机的安装接口为可调整结构,以安装于具有不同安装接口的设备上;
9.进一步,所述双输出式输出轴为可替换结构,以匹配与应用场景下的舵板型号;
10.进一步,所述可替换驱动单元模块包括电机和可替换式电机安装板;所述电机为步进式电机、伺服电机或盘式电机;
11.进一步,所述滚珠丝杠机构包括丝杆和安装于丝杆上的丝杠螺母;所述丝杆两端通过背对背安装的一对轴承支承于轴承座;
12.进一步,所述倒置曲柄滑块机构包含滑块、连杆和摇臂;所述滑块固定于丝杠螺母;所述连杆铰接于滑块与摇臂之间,所述摇臂通过花键连接双输出式连接轴。
13.本发明的有益效果:
14.(1)本发明的驱动单元模块化的双输出轴电动舵机,实现了单台舵机带动两台舵面,不仅可以提高多个舵面运转的同步性,而且减少了舵机的数量,减轻了水下航行器的整体重量;
15.(2)本发明的驱动单元模块化的双输出轴电动舵机相较于传统舵机,由于其输出轴和驱动单元的可替换性,因此具有更广泛的应用场景;
16.(3)本发明的驱动单元模块化的双输出轴电动舵机,模块化的驱动单元易于维修更换,局限性小。
附图说明
17.下面结合附图和实施例对本发明作进一步描述。
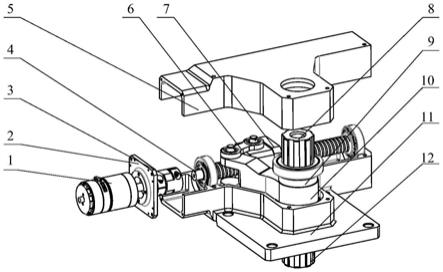
18.图1为本发明的整体结构示意图。
19.附图标记:1-电机,2-可替换式电机安装板,3-联轴器,4-丝杆,5-上端盖,6-连杆,7-丝杠螺母,8-上接口,9-环形编码器,10-摇臂,11-下基座,12-下接口;
具体实施方式
20.如图1所示,本实施例的一种驱动单元模块化的双输出轴电动舵机,包括可替换驱动单元模块、滚珠丝杠机构、倒置曲柄滑块机构和双输出式连接轴;
21.所述可替换驱动单元模块包括电机1和可替换式电机安装板2,不同安装板与电机安装接口随所适配的电机1变化,但与舵机本体安装的接口固定;所述电机1可根据实际情况更换不同种类的电机,如步进式电机、伺服电机、盘式电机等;
22.所述滚珠丝杠机构包括丝杆4和安装于丝杆4上的丝杠螺母7;所述丝杆4两端通过背对背安装的两个轴承支承于轴承座;所述电机1的输出端通过弹性联轴器3传动连接于滚珠丝杠机构的丝杆4;所述弹性联轴器3为可拆分式梅花弹性联轴器,可拆分为与舵机输入轴相连一端和与电机1输出轴相连一端,在更换电机1时,仅需拆卸联轴器3中与电机输出轴相连一端,无需拆卸与舵机输入轴相连一端。
23.所述倒置曲柄滑块机构包含滑块、连杆6和摇臂10;所述滑块固定在丝杠螺母7上,连杆6一端连接滑块,另一端连接摇臂10,摇臂10另一端通过花键连接双输出式连接轴;所述双输出式连接轴中间与摇臂10通过花键相连,其两端各设置一个安装接口(上接口8和下接口12),可令舵机本体同时连接两个舵板;所述双输出式输出轴设计为嵌套式,由不同规格的带有花键的套筒组合而成,可根据使用场景选用不同尺寸的花键,以匹配与应用场景下的舵板型号;输出轴外套有用于采集其转角信息的环形编码器9。
24.所述舵机的外部壳体包含下基座11和上端盖5。舵机安装板的安装孔位设计为辐射型长圆孔,以安装于具有不同安装接口的设备上
25.本发明的传动路线为:可替换驱动单元模块
──
丝杆4
──
丝杆螺母
──
摇臂10
──
双输出式连接轴,电机1产生的驱动传递给滚珠丝杠,滚珠丝杠副将丝杆4的转动转化为螺母的直线运动,进而推动摇臂10转动,与摇臂10相连的双输出式连接轴也随之转动,从而带动外部的两个舵板同步转动。摇臂10运动两侧设置机械限位,故输出轴只能在特定角度范围内做转动。
26.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种驱动单元模块化的双输出轴电动舵机,其特征在于:包括可替换驱动单元模块、滚珠丝杠机构、倒置曲柄滑块机构和双输出式连接轴;所述可替换驱动单元模块的输出端传动连接于滚珠丝杠机构的丝杆;所述滚珠丝杠机构的丝杠螺母用于带动倒置曲柄滑块机构的滑块往复直线运动;所述倒置曲柄滑块机构的摇臂连接于双输出式连接轴以驱动双输出式连接轴转动;所述双输出式连接轴的两端均设有舵板安装接口以带动两舵板同步动作。2.根据权利要求1所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述可替换驱动单元模块的输出轴通过弹性联轴器传动连接于滚珠丝杠机构的丝杆。3.根据权利要求2所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述弹性联轴器为可拆分式弹性联轴器,其输入端孔径可随驱动单元模块的转轴进行适应性调节。4.根据权利要求3所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述舵机的安装接口为可调整结构,以安装于具有不同安装接口的设备上。5.根据权利要求4所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述双输出式输出轴为可替换结构,以匹配与应用场景下的舵板型号。6.根据权利要求5所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述可替换驱动单元模块包括电机和可替换式电机安装板;所述电机为步进式电机、伺服电机或盘式电机。7.根据权利要求6所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述滚珠丝杠机构包括丝杆和安装于丝杆上的丝杠螺母;所述丝杆两端通过背对背安装的一对轴承支承于轴承座。8.根据权利要求7所述的驱动单元模块化的双输出轴电动舵机,其特征在于:所述倒置曲柄滑块机构包含滑块、连杆和摇臂;所述滑块固定于丝杠螺母;所述连杆铰接于滑块与摇臂之间,所述摇臂通过花键连接双输出式连接轴。
技术总结
本发明公开了一种驱动单元模块化的双输出轴电动舵机,包括可替换驱动单元模块、滚珠丝杠机构、倒置曲柄滑块机构和双输出式连接轴;所述可替换驱动单元模块的输出端传动连接于滚珠丝杠机构的丝杆;所述滚珠丝杠机构的丝杠螺母用于带动倒置曲柄滑块机构的滑块往复直线运动;所述倒置曲柄滑块机构的摇臂连接于双输出式连接轴以驱动双输出式连接轴转动;所述双输出式连接轴的两端均设有舵板安装接口以带动两舵板同步动作。本发明的电动舵机不仅可以通过一个舵机同时控制两个舵面,确保两个舵面动作的同步性,减少多舵同步运动的误差,同时还实现了驱动单元的模块化,可以根据实际需求更换不同性能的驱动单元,极大提高舵机的应用范围。应用范围。应用范围。
技术研发人员:柏龙 孙园喜 陈晓红 湛旭磊
受保护的技术使用者:重庆大学
技术研发日:2022.01.25
技术公布日:2022/4/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1