一种波浪滑翔器襟翼辅助推进装置
1.本发明涉及一种基于襟翼的波浪滑翔器辅助推进装置设计,尤其涉及一种波浪滑翔器襟翼辅助推进装置,可应用于船舶辅助推进领域,解决波浪滑翔器弱机动的问题。
背景技术:
2.波浪滑翔器作为一种新型的海洋机器人,利用潜体水翼将波浪能转化为自身前进的动力,同时甲板搭载的太阳能电池板为各种海洋观测仪器供电,具有长航时、大范围、低成本等优点,对海洋环境监测与保护、渔业捕捞,能源开采等领域具有重要的作用,已在军事和民用领域显示出良好的应用前景,近十几年来已成为各大科研院所研究重点之一。波浪滑翔器前进的推力全部来源于波浪运动,海洋环境的变化使其推力随机变化,航行速度也难以人为控制。
3.波浪滑翔器主要包括三个部分,水面船、连接柔性缆绳、水下牵引机。其中水下牵引机所安装的水翼的运动被动翻转,为整个装置产生前进推力,是设计研发的重点。
4.水翼的摆动攻角对波浪滑翔器的推力转化、推进效率有直接的影响。而现有的波浪滑翔器水下牵引机安装的水翼均为单一控制面。在水下牵引机翼片选择时,通过调整翼型结构参数,会达到一个相对最佳的水翼型号。然而该型号水翼通常只能满足在指定的几个工况下达到最佳性能。在波浪滑翔器长时间运行条件下,波况状态随机,变化较大,现有设计难以达到最佳性能。因此,需要提出一种技术方案以改善上述技术问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种用于波浪滑翔器的变攻角的水下牵引机襟翼辅助推进装置。通过为主水翼设置后缘襟翼机构,将单一控制面变为两个独立运动的控制面,人为的控制后缘襟翼旋转角度,进而改变主水翼等效攻角,大幅度的改变主水翼等效攻角,使水翼产生的推力是大小可控的,目的是人为控制波浪滑翔器速度,从而提高工作效率和可控性。
6.本发明的目的是这样实现的:包括主水翼,还包括水翼后缘襟翼机构,所述水翼后缘襟翼机构设置于主水翼后缘,水翼后缘襟翼机构将改变主水翼等效攻角,所述水翼后缘襟翼机构在控制下转动范围-45
°
—+45
°
;水翼后缘襟翼机构包括设置在主水翼端部中间位置的步进电机、与步进电机输出轴连接的轻质连杆摇摆结构、与轻质连杆摇摆结构连接的襟翼。
7.本发明还包括这样一些结构特征:
8.1.所述水翼主体为naca型对称水翼,主体水翼内置角度传感器。
9.2.水翼后缘襟翼机构宽度应与主水翼相等或不小于主水翼弦长的75%。
10.3.所述水翼后缘襟翼机构形状为襟翼舵面状,内置角度传感器。
11.4.在波浪滑翔器启动阶段,水翼后缘襟翼机构将与水翼主体角度相同或在小的角度之内,其上下表面与水翼主体上下表面只存在小的夹角,二者共同形成完整的水翼外形;
当在低海况条件下,波浪的能量不足以使波浪滑翔器获得前进的动力而无法启动,此时后缘襟翼在步进电机的带动下旋转,最大角度为45
°
,使波浪滑翔器水下牵引机构的水翼能够捕获足够的能量,使其水翼产生推力,带动滑翔器前进;在波浪滑翔器行进阶段,水翼后缘襟翼机构随水翼主体角度相同或在较小的角度之内,在控制器没有发出控制指令前,步进电机不执行动作;当需要提升波浪滑翔器速度,控制器根据此时海况以及水下牵引机构主水翼翻转角度,估计出后缘襟翼所需增大的等效角度,控制电机旋转,实现控制命令,达到控制增速效果;波浪滑翔器在高海况行进时,若需降低滑翔器速度,控制器根据此时海况以及水下牵引机构主水翼翻转角度,计算出后缘襟翼所需减小的等效角度,控制电机旋转,实现控制命令,达到控制减速效果。
12.与现有技术相比,本发明的有益效果是:本发明通过水下牵引机的变角度襟翼辅助推进系统,将波浪滑翔器水下牵引机构的水翼被动转动改变为角度可变的主动控制,可以实现水翼所受攻角的的主动调控,进而使水翼产生的推力可控,实现对波浪滑翔器速度的主动控制;本发明通过襟翼调节系统,结合角度感知单元,可以实现波浪滑翔器对波况更高的适应性,以达到对波浪能的最大捕获。
附图说明
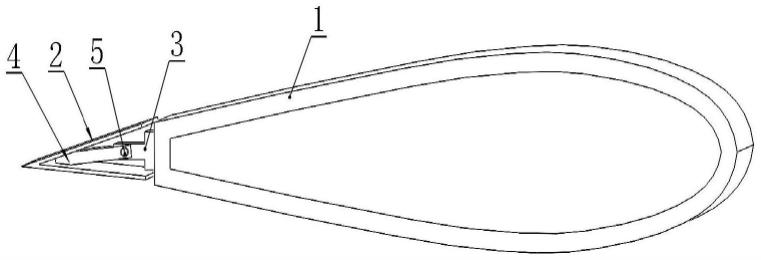
13.图1一种用于波浪滑翔器变角度襟翼辅助推进装置结构示意图;
14.图2襟翼摇摆结构示意图;
15.图3波浪滑翔器变角度襟翼辅助推进装置工作原理示意图;
16.编号说明:1水翼主体,2水翼后缘襟翼,3步进电机,4轻质连杆摇摆结构,5步进电机轴位置。
具体实施方式
17.下面结合附图与具体实施方式对本发明作进一步详细描述。
18.本发明可以包括水面船、柔性缆和水下牵引机三部分,水面浮体船和柔性缆绳连接,柔性缆绳和水下牵引机连接;所述水下牵引机包括水翼俯仰运动机构、后缘襟翼辅助调节机构;所述水翼俯仰运动机构包括水翼、水翼攻角检测传感器,固定转轴、运动轴、弹簧和弹簧连接销,所述水翼绕所述固定转轴做俯仰运动,所述弹簧提供俯仰运动的恢复力矩。所述襟翼辅助调节机构包括襟翼、襟翼攻角检测传感器、步进电机。
19.结合图1至图3,本发明的一种用于波浪滑翔器变角度襟翼辅助推进系统结构如图1所示,主要分为水翼主体1,水翼后缘襟翼机构2。其中水翼后缘襟翼机构2通过可以旋转的步进电机3连接于水翼主体1后缘,可以根据水翼转角自动调节合适的后缘襟翼装置的角度,位于步进电机输出轴上的轻质连杆摇摆结构4与后缘襟翼通过螺栓固定而随电机转动。
20.所述水翼后缘襟翼机构设置于主水翼后缘,所述水翼后缘襟翼机构可将改变主水翼等效攻角;所述水翼主体为naca型对称水翼,主体水翼内置角度传感器。所述水翼后缘襟翼机构形状为襟翼舵面状,内置角度传感器,水翼后缘襟翼机构宽度应与主水翼相等或不小于主水翼弦长的75%。所述水翼后缘襟翼机构与机翼主体铰接,所述水翼后缘襟翼机构在控制下转动范围-45
°
—+45
°
。所述襟翼由步进电机带动旋转,电机的输出轴与轻质连杆连接。所述步进电机固定在实心叶片中部靠近尾缘的位置,所述轻质连杆摇摆结构前端与
襟翼内表面光滑接触,并利用螺栓与襟翼直接固定。
21.工作原理:
22.在波浪滑翔器启动阶段,水翼后缘襟翼机构将与水翼主体角度相同或在较小的角度之内,其上下表面与水翼主体上下表面只存在较小的夹角,二者共同形成完整的水翼外形。当在低海况条件下,波浪的能量不足以使波浪滑翔器获得前进的动力而无法启动,此时后缘襟翼在步进电机的带动下旋转,最大角度为45
°
,使波浪滑翔器水下牵引机构的水翼能够捕获足够的能量,使其水翼产生推力,带动滑翔器前进。
23.在波浪滑翔器行进阶段,水翼后缘襟翼机构随水翼主体角度相同或在较小的角度之内,在控制器没有发出控制指令前,步进电机不执行动作。当需要提升波浪滑翔器速度,控制器根据此时海况以及水下牵引机构主水翼翻转角度,估计出后缘襟翼所需增大的等效角度,控制电机旋转,实现控制命令,达到控制增速效果。
24.波浪滑翔器在高海况行进时,若需降低滑翔器速度,控制器根据此时海况以及水下牵引机构主水翼翻转角度,计算出后缘襟翼所需减小的等效角度,控制电机旋转,实现控制命令,达到控制减速效果。
25.本设计中水翼后缘襟翼装置的目的在于:波浪滑翔器前进的动力完全依赖与海况,节能环保噪声低,在保证其节能、低噪声优点的情况下,对水翼结构的进一步改动,可使其推进性能得到极大的提高。水下牵引机构水翼小迎角工况下,若想提高波浪滑翔器速度,控制后缘襟翼转动,以增加水翼整体等效攻角,使水翼产生推力增大,从而增加滑翔器速度;水下牵引机构水翼大迎角工况下,若想降低波浪滑翔器速度,控制后缘襟翼转动,以减小水翼整体等效攻角,减小水翼产生的推力,从而降低滑翔器速度。
26.综上,本发明涉及一种波浪滑翔器襟翼辅助推进装置,水翼俯仰运动机构、后缘襟翼辅助调节机构。所述水翼俯仰运动机构是依靠波浪滑翔器水下牵引机上下运动使其上面安装的水翼翻转,产生前进推力。所述后缘襟翼辅助调节机构位于主水翼尾部,其依靠步进电机旋转来辅助调节主水翼的翻转角度。本发明针对现有波浪滑翔器行进速度完全依赖于海况,辅助螺旋桨推进噪声大能耗高的问题进行改进。增加主体水翼后缘襟翼辅助调节机构,辅助调节主水翼等效攻角,结构简单,零噪声,能耗低,有效提高了滑翔器对不同海况的适应能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1