模块化水下桩基结构自适应清理及损伤检测机械臂
1.本发明涉及机械臂技术领域,具体地说,涉及一种模块化水下桩基结构自适应清理及损伤检测机械臂。
背景技术:
2.桩基作为桥梁、钻井平台、码头结构的重要组成部分,承担着将上部结构荷载传递给地基的重要作用。其病害的发展直接影响桥跨结构的实用性和耐久性,严重时还会危及其运营安全。水下桩基受到的腐蚀类型主要有物理腐蚀,化学腐蚀,生物腐蚀等,而生物腐蚀对于桥梁桩基的影响十分严重。生物腐蚀是指桥梁桩基材料表面附着生物的附着、生长、繁殖、代谢、死亡等过程中产生的物质直接与间接对材料造成的腐蚀。生物腐蚀的原因大致可归为以下几类:水中叶绿素植物可使海水中含氧量增加,水下生物放出的co2使周围海水酸性加大,水下生物死亡、腐烂可产生酸性物质和h2s,这些都可使腐蚀加速。此外,有些水下生物会破坏金属表面的油漆或镀层,有些微生物本身对金属就有腐蚀作用。以水下桥梁桩基为例,生物腐蚀会导致桥梁桩基的钢筋混凝土劣化,若不采取措施,会严重影响桩基的耐久性。因此,应尽量使水下生物远离桥梁桩基结构。对此,本技术便是提出来一种快速、有效、可靠的清洁装置,可以延长桥梁桩基的使用寿命,确保结构安全性和耐久性,节约经济。
3.现广泛应用的清理技术有以下两种:物理清除技术和防污涂料技术;物理清除技术主要为人工直接潜入水下用工具对桩基表面受侵蚀部分进行清洁或是采用机械设备在桩基表面进行清洗和刮除。用此方法来减少水下生物附着在桥梁水下桩基上的时间,进而减轻生物腐蚀对桥梁水下桩基的不良影响,提高桥梁的耐久性,保证桥梁桩基的承载能力。防污涂料技术则是将绿色环保类防腐蚀涂料涂在桥梁水下桩基的表面。主要是通过电化学原理,起到很好的中和和防止基材电位升高的作用。此外,防腐蚀涂料也能避免涂层针孔的存在,涂层硬度高,耐磨抗冲击,耐酸碱老化时间长。从而提高桥梁水下桩基的耐久度,保证桥梁桩基的承载能力。
4.但两种上述常用清理技术存在一些缺陷,不能合理的解决实际工程问题:
5.目前人工和机械设备清洁所采用的清洁工具一般是硬质的刀片等,在清洁过程中可能对桥梁水下桩基结构造成物理上的破坏,且在清理附着物时,由于存在难以贴合桩基等问题,多会残留附着物。
6.涂料防护法所采用的涂料质量和耐久性是防腐蚀效果的主要因素,很难保证及其性能。涂料防护法在应对已经受到腐蚀的水下桩基时作用较为局限,无法对已经受损的桩基进行修补。
7.现阶段的物理清除技术缺少能在水下作业时,对桥梁水下桩基进行检测和实时监控的装置,无法准确了解水下桩基的受腐蚀程度和清洁状况,且往往需要人工进行操作,工程造价高,不利于实际。
技术实现要素:
8.本发明的内容是提供一种模块化水下桩基结构自适应清理及损伤检测机械臂,其能够克服现有技术的某种或某些缺陷。
9.根据本发明的一种模块化水下桩基结构自适应清理及损伤检测机械臂,其包括传动臂杆,传动臂杆一端设有模块化接口,传动臂杆另一端设有机械臂连接部,机械臂连接部上分别设有两个臂框,任一臂框均包括内侧臂框和外侧臂框,内侧臂框和外侧臂框通过关节联接,臂框内侧设有软体移动清理部;
10.模块化接口联接水下无人机接口传输电流及控制信号,传动臂杆内置防水舵机接收控制信号,驱动机械臂连接部内置齿轮传动系统,实现两个臂框张合,软体移动清理部紧固于三处可相对移动的滑块上。
11.作为优选,机械臂连接部嵌有用于补偿操控臂框视野的探照灯和第一防水摄像头。
12.作为优选,软体移动清理部包括软体部分,软体部分表面设有磨砂层,磨砂层上设有类刮刀,类刮刀表面镀有金属层。
13.作为优选,关节内部内置有第一防水电机,第一防水电机控制两个臂框相对角度。
14.作为优选,内侧臂框和外侧臂框内分别设有支撑架,支撑架上设有第二防水摄像头,第二防水摄像头负责清理工作完成后的表面信息采集。
15.作为优选,臂框上设有一个丝杆和两个滑槽,丝杆连接有第二防水电机,丝杆与中间的滑块配合,其余两个滑块与对应的滑槽配合。
16.作为优选,三个滑块通过贴条固结保持同一水平面。
17.本发明通过模块化水下桩基结构自适应清理及损伤检测机械臂搭载至水下机器人,大幅度提高该类清理工作效率,提高作业安全性,降低人工成本。
18.本发明通过控制机械臂自适应结构紧贴待处理桩基面,软体移动清理部移动来完成桩基表面清理,同时内置于臂框内的第二防水摄像头进行桩基表面腐蚀数据进行采集,使多项工作并行,提高此类工作效率。
19.本发明通过内侧臂框和外侧臂框、臂框与机械臂连接部的相对角度调整,固定在臂框上的软体移动清理部会进行相应变形,在遇到不同半径桩基时,可通过调整上述两处相对角度,调整软体移动清理部贴合至待清理桩基表面,大幅减小设备调整成本。
20.本发明通过设计的软体带镀层清理贴条,可实现桩基表面的大部分清理工作,下部分类刮刀镀金属层结构负责桩基表面初步清理,上部分磨砂层负责光滑清理面,并清理残留附着物。
附图说明
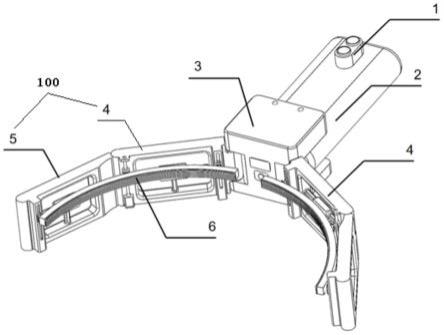
21.图1为实施例1中一种模块化水下桩基结构自适应清理及损伤检测机械臂的立体结构示意图;
22.图2为实施例1中臂框的结构示意图;
23.图3为实施例1中软体移动清理部的结构示意图;
24.图4为实施例1中臂框的立体结构示意图;
25.图5为实施例1中关节的结构示意图。
具体实施方式
26.为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。应当理解的是,实施例仅仅是对本发明进行解释而并非限定。
27.实施例1
28.如图1-5所示,本实施例提供了一种模块化水下桩基结构自适应清理及损伤检测机械臂,其包括传动臂杆2,传动臂杆2一端设有模块化接口1,传动臂杆2另一端设有机械臂连接部3,机械臂连接部3上分别设有两个臂框100,任一臂框100均包括内侧臂框4和外侧臂框5,内侧臂框4和外侧臂框5通过关节41联接,臂框100内侧设有软体移动清理部6;
29.模块化接口1联接水下无人机接口传输电流及控制信号,传动臂杆2内置防水舵机接收控制信号,驱动机械臂连接部3内置齿轮传动系统,实现两个臂框100张合,软体移动清理部6紧固于三处可相对移动的滑块61上。
30.机械臂连接部3嵌有用于补偿操控臂框100视野的探照灯7和第一防水摄像头8。
31.软体移动清理部6包括软体部分9,软体部分9表面设有磨砂层10,磨砂层10上设有类刮刀11,类刮刀11表面镀有金属层。类刮刀11可完成桩基表面初步清理,磨砂层10截面为矩形,负责初步清理后桩基表面的光滑工作,以及清理残留附着物,软体移动清理部6为可替换部件,在多次使用表面金属镀层磨损后可及时更换。
32.关节41内部内置有第一防水电机20,第一防水电机20控制两个臂框100相对角度。
33.内侧臂框4和外侧臂框5内分别设有支撑架30,支撑架30上设有第二防水摄像头31,第二防水摄像头31负责清理工作完成后的表面信息采集。
34.臂框100上设有一个丝杆62和两个滑槽63,丝杆62连接有第二防水电机64,丝杆62与中间的滑块61配合,其余两个滑块61与对应的滑槽63配合。
35.三个滑块61通过贴条固结保持同一水平面。
36.本实施例通过该模块化水下桩基结构自适应清理及损伤检测机械臂搭载至水下机器人,大幅度提高该类清理工作效率,提高作业安全性,降低人工成本。
37.本实施例通过控制机械臂自适应结构紧贴待处理桩基面,软体移动清理部6移动来完成桩基表面清理,同时内置于臂框100内的第二防水摄像头31进行桩基表面腐蚀数据进行采集,使多项工作并行,提高此类工作效率。
38.本实施例通过内侧臂框4和外侧臂框5、臂框100与机械臂连接部3的相对角度调整,固定在臂框100上的软体移动清理部6会进行相应变形,在遇到不同半径桩基时,可通过调整上述两处相对角度,调整软体移动清理部6贴合至待清理桩基表面,大幅减小设备调整成本。
39.本实施例通过设计的软体带镀层清理贴条,可实现桩基表面的大部分清理工作,下部分类刮刀镀金属层结构负责桩基表面初步清理,上部分磨砂层10负责光滑清理面,并清理残留附着物。
40.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1