一种景点智能观光无人驾驶游艇的制作方法
1.本发明涉及游艇领域,尤其涉及一种景点智能观光无人驾驶游艇。
背景技术:
2.现有技术中,各大景点均会开展乘船游玩项目,而此类船只上不会配备工作人员,通常由游客或者智能设备来控制船只运行,由于此类船只相对较小,当游客上船或者下船时,船体会出现摇晃现象,对于不熟悉坐船的游客容易产生恐惧感,降低游玩体验,还会增加坠船风险,同时,当使用完成的船只靠岸时,为了避免船只飘离岸边,工作人员需要使用绳索将船只固定在岸边,操作过程繁琐,效率低下。
技术实现要素:
3.为了克服当游客上船或者下船时,船体会出现摇晃现象,对于不熟悉坐船的游客容易产生恐惧感,降低游玩体验,还会增加坠船风险的缺点,本发明提供一种景点智能观光无人驾驶游艇。
4.技术方案如下:一种景点智能观光无人驾驶游艇,包括有船体、智能控制器、第一固定板、第三固定块、第五固定块、扩张块、固定组件和遮挡组件;船体内侧右部连接有智能控制器;船体下侧右部固接有第一固定板;第一固定板上连接有固定组件;固定组件右侧连接有两个第三固定块;固定组件右侧连接有第五固定块,并且第五固定块位于两个第三固定块之间;固定组件左侧连接有八个扩张块;船体上侧连接有遮挡组件。
5.进一步地,固定组件包括有第一支撑架、连接块、联动架、滑块、联动板、第一伸缩气缸、支撑板、第一圆杆、第一圆柱、第二圆柱、防护圈、锁定单元、定位单元、切换单元、加固单元和驱动单元;船体右方设置有第一支撑架;第一支撑架上侧固接有连接块;连接块上滑动连接有联动架;联动架上滑动连接有滑块;滑块左侧固接有联动板;联动板下侧左部固接有第一伸缩气缸;第一伸缩气缸的伸缩端固接有支撑板;支撑板下侧固接有两个第一圆杆;两个第一圆杆均与联动板滑动连接;支撑板前侧和后侧均固接有一个第一圆柱;两个第一圆柱上侧均固接有一个第二圆柱;第一固定板前侧和后侧均固接有一个防护圈;第一固定板上侧连接有锁定单元;第一固定板右侧连接有定位单元;连接块上连接有切换单元;第二圆柱上连接有加固单元;联动架上连接有驱动单元,驱动单元用于带动滑块运动。
6.进一步地,锁定单元包括有滑套块、第二伸缩气缸、滑板和第一固定块;第一固定板上侧中部固接有滑套块;滑套块上侧固接有第二伸缩气缸;滑套块内侧滑动连接有滑板;滑板在第一固定板表面滑动;第二伸缩气缸的伸缩端与滑板固接;滑板右侧前部和右侧后部均固接有一个第一固定块;第一固定块在第一固定板表面滑动;两个第一固定块分别于相邻的第二圆柱卡接。
7.进一步地,定位单元包括有信号发射器、连接架、第二固定块和信号接收器;第一固定板右侧前部和右侧后部均连接有一个信号发射器;连接块上侧固接有连接架;连接架上侧中部固接有第二固定块;连接架上侧前部和上侧后部均固接有一个信号接收器。
8.进一步地,切换单元包括有第三伸缩气缸、第四固定块、第四伸缩气缸和第二固定板;连接块右侧前部和右侧后部均固接有一个第三伸缩气缸;两个第三伸缩气缸的伸缩端分别与相邻的第三固定块固接;两个第三固定块均与连接块滑动连接;联动架右侧前部和右侧后部均固接有一个第四固定块;两个第四固定块分别与相邻的第三固定块卡接;连接块右侧中部固接有第四伸缩气缸;第四伸缩气缸的伸缩端与第五固定块固接;第五固定块与连接块滑动连接;联动架中部固接有第二固定板;第五固定块穿过滑块,第五固定块与第二固定板卡接。
9.进一步地,加固单元包括有圆筒、第一联动块、弹簧、第五伸缩气缸和第二联动块;两个第二圆柱内侧均固接有一个圆筒;两个圆筒分别与相邻的第一圆柱固接;两个圆筒中部均呈环形阵列滑动连接有四个第一联动块;八个第一联动块分别与相邻的扩张块固接;八个扩张块分别与相邻的第二圆柱相接触;八个第一联动块上均套设有一个弹簧,弹簧的一端与相邻的扩张块固接,弹簧的另一端与相邻的圆筒固接;两个第二圆柱内侧顶部均固接有一个第五伸缩气缸;两个第五伸缩气缸的伸缩端均固接有一个第二联动块;两个第二联动块分别与相邻的第一联动块相接触。
10.进一步地,遮挡组件包括有多级液压杆、第一遮挡板、第二支撑架、第二电机、第二圆杆和第二遮挡板;船体前侧和后侧均固接有两个多级液压杆;四个多级液压杆的伸缩端之间固接有一个第一遮挡板;第一遮挡板上侧前部和上侧后部均固接有一个第二支撑架;两个第二支撑架右侧均固接有一个第二电机;两个第二支撑架上部均转动连接有一个第二圆杆;两个第二电机的输出端分别与相邻的第二圆杆固接;两个第二圆杆中部均固接有一个第二遮挡板;第二遮挡板与相邻的第二支撑架相接触。
11.进一步地,遮挡组件还包括有磁性件;两个第二遮挡板的相背侧均固接有一个磁性件。
12.进一步地,第三固定块、第四固定块、第五固定块和第二固定板上均设置有倒钩。
13.进一步地,第二联动块下侧边缘开设有四个斜面,四个第一联动块与第二联动块相接触位置均为斜面。
14.有益效果是:使用时,通过第一圆柱、第二圆柱和第一固定块相配合对第一固定板进行固定,避免船只出现摇晃现象,从而减小无上船经验游客的恐惧感,提高游玩体验,并且降低坠船风险,通过联动板代替绳索自动将船固定在岸边,无需人工使用绳索将船体固定,大大提高效率,通过第三固定块和第五固定块对联动板的状态进行切换,船体随着水面飘荡时,联动板可以跟随船体自由活动,避免锁紧状态下各机械部件因受到船体的拉扯力而出现松弛现象,大大提高稳定性;同时,通过扩张块和防护圈相配合,实现了在偏移状态下对第一固定板和船体进行固定,提高稳定性,而且橡胶材质的防护圈也用于对第一固定板进行保护,避免因船体摇晃而出现磨损现象;
15.通过升降第一遮挡板,使得在恶劣天气时减小船体整体的风阻面积,从而提高安全性能,下降后的第一遮挡板也用于防止雨水进入至船体中,降低工作人员的维护难度,通过收放第二遮挡板,提高遮阳范围,第二遮挡板收起后可使得不同船体之间停靠更加紧凑,利于节约空间和便于管理。
附图说明
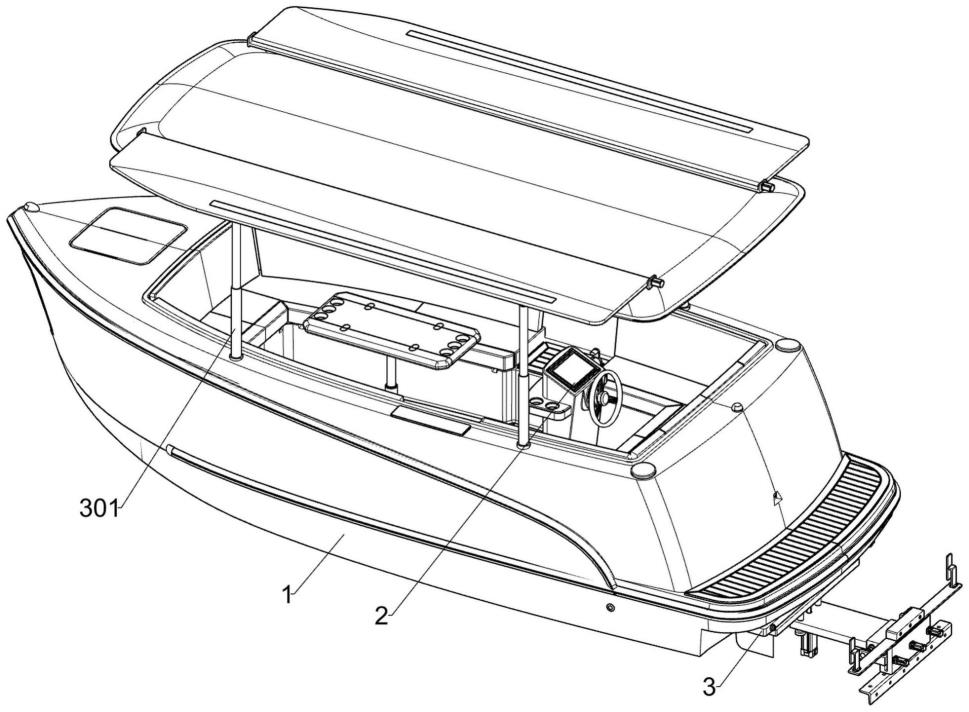
16.图1是本发明景点智能观光无人驾驶游艇的第一种结构示意图;
17.图2是本发明景点智能观光无人驾驶游艇的第二种结构示意图;
18.图3是本发明景点智能观光无人驾驶游艇的部分结构示意图;
19.图4是本发明固定组件的第一种结构示意图;
20.图5是本发明固定组件的第二种结构示意图;
21.图6是本发明固定组件的第一种部分结构示意图;
22.图7是本发明固定组件的第二种部分结构示意图;
23.图8是本发明固定组件的第三种部分结构示意图;
24.图9是本发明固定组件的第四种部分结构示意图;
25.图10是本发明遮挡组件的结构示意图;
26.图11是本发明遮挡组件的部分结构示意图。
27.附图中的标记:1-船体,2-智能控制器,3-第一固定板,201-第一支撑架,202-连接块,203-联动架,204-滑块,205-联动板,206-第一伸缩气缸,207-支撑板,208-第一圆杆,209-第一圆柱,2010-第二圆柱,2011-防护圈,2012-滑套块,2013-第二伸缩气缸,2014-滑板,2015-第一固定块,2016-信号发射器,2017-连接架,2018-第二固定块,2019-信号接收器,2020-第三伸缩气缸,2021-第三固定块,2022-第四固定块,2023-第四伸缩气缸,2024-第五固定块,2025-第二固定板,2026-圆筒,2027-第一联动块,2028-扩张块,2029-弹簧,2030-第五伸缩气缸,2031-第二联动块,2032-第一电机,2033-丝杆,301-多级液压杆,302-第一遮挡板,303-第二支撑架,304-第二电机,305-第二圆杆,306-第二遮挡板,307-磁性件。
具体实施方式
28.以下所述仅为本发明的较佳实施例,并不因此而限定本发明的保护范围。
29.实施例1
30.一种景点智能观光无人驾驶游艇,如图1-9所示,包括有船体1、智能控制器2、第一固定板3、第三固定块2021、第五固定块2024、扩张块2028、固定组件和遮挡组件;船体1内侧右部连接有智能控制器2;船体1下侧右部螺栓连接有第一固定板3;第一固定板3上连接有固定组件;固定组件右侧连接有两个第三固定块2021;固定组件右侧连接有第五固定块2024,并且第五固定块2024位于两个第三固定块2021之间;固定组件左侧连接有八个扩张块2028;船体1上侧连接有遮挡组件。
31.固定组件包括有第一支撑架201、连接块202、联动架203、滑块204、联动板205、第一伸缩气缸206、支撑板207、第一圆杆208、第一圆柱209、第二圆柱2010、防护圈2011、锁定单元、定位单元、切换单元、加固单元和驱动单元;船体1右方设置有第一支撑架201;第一支撑架201上侧螺栓连接有连接块202;连接块202上滑动连接有联动架203;联动架203上滑动连接有滑块204;滑块204左侧焊接有联动板205;联动板205下侧左部螺栓连接有第一伸缩气缸206;第一伸缩气缸206的伸缩端固接有支撑板207;支撑板207下侧焊接有两个第一圆杆208;两个第一圆杆208均与联动板205滑动连接;支撑板207前侧和后侧均焊接有一个第一圆柱209;两个第一圆柱209上侧均焊接有一个第二圆柱2010;第一固定板3前侧和后侧均
固接有一个防护圈2011;第一固定板3上侧连接有锁定单元;第一固定板3右侧连接有定位单元;连接块202上连接有切换单元;第二圆柱2010上连接有加固单元;联动架203上连接有驱动单元,驱动单元用于带动滑块204运动。
32.防护圈2011由橡胶材质制成。
33.锁定单元包括有滑套块2012、第二伸缩气缸2013、滑板2014和第一固定块2015;第一固定板3上侧中部焊接有滑套块2012;滑套块2012上侧固接有第二伸缩气缸2013;滑套块2012内侧滑动连接有滑板2014;滑板2014在第一固定板3表面滑动;第二伸缩气缸2013的伸缩端与滑板2014固接;滑板2014右侧前部和右侧后部均焊接有一个第一固定块2015;第一固定块2015在第一固定板3表面滑动;两个第一固定块2015分别于相邻的第二圆柱2010卡接。
34.定位单元包括有信号发射器2016、连接架2017、第二固定块2018和信号接收器2019;第一固定板3右侧前部和右侧后部均连接有一个信号发射器2016;连接块202上侧螺栓连接有连接架2017;连接架2017上侧中部焊接有第二固定块2018;连接架2017上侧前部和上侧后部均固接有一个信号接收器2019。
35.切换单元包括有第三伸缩气缸2020、第四固定块2022、第四伸缩气缸2023和第二固定板2025;连接块202右侧前部和右侧后部均固接有一个第三伸缩气缸2020;两个第三伸缩气缸2020的伸缩端分别与相邻的第三固定块2021固接;两个第三固定块2021均与连接块202滑动连接;联动架203右侧前部和右侧后部均焊接有一个第四固定块2022;两个第四固定块2022分别与相邻的第三固定块2021卡接;连接块202右侧中部固接有第四伸缩气缸2023;第四伸缩气缸2023的伸缩端与第五固定块2024固接;第五固定块2024与连接块202滑动连接;联动架203中部焊接有第二固定板2025;第五固定块2024穿过滑块204,第五固定块2024与第二固定板2025卡接。
36.第三固定块2021、第四固定块2022、第五固定块2024和第二固定板2025上均设置有倒钩。
37.加固单元包括有圆筒2026、第一联动块2027、弹簧2029、第五伸缩气缸2030和第二联动块2031;两个第二圆柱2010内侧均焊接有一个圆筒2026;两个圆筒2026分别与相邻的第一圆柱209焊接;两个圆筒2026中部均呈环形阵列滑动连接有四个第一联动块2027;八个第一联动块2027分别与相邻的扩张块2028焊接;八个扩张块2028分别与相邻的第二圆柱2010相接触;八个第一联动块2027上均套设有一个弹簧2029,弹簧2029的一端与相邻的扩张块2028焊接,弹簧2029的另一端与相邻的圆筒2026焊接;两个第二圆柱2010内侧顶部均螺栓连接有一个第五伸缩气缸2030;两个第五伸缩气缸2030的伸缩端均固接有一个第二联动块2031;两个第二联动块2031分别与相邻的第一联动块2027相接触。
38.第二联动块2031下侧边缘开设有四个斜面,四个第一联动块2027与第二联动块2031相接触位置均为斜面。
39.驱动单元包括有第一电机2032和丝杆2033;联动架203后侧螺栓连接有第一电机2032;联动架203左侧转动连接有丝杆2033;第一电机2032的输出端与丝杆2033焊接;丝杆2033与滑块204旋接。
40.人工通过螺栓将第一支撑架201和第二固定块2018固定在岸边的钢架上,完成准备工作;当游客上船时,通过第一圆柱209、第二圆柱2010和第一固定块2015相配合将第一
固定板3固定,避免船只出现摇晃现象,从而减小无上船经验游客的恐惧感,提高游玩体验,并且降低坠船风险;当准备行驶时,第二伸缩气缸2013带动滑板2014向后运动,滑板2014带动第一固定块2015远离第二圆柱2010,然后第一伸缩气缸206带动支撑板207向下运动,支撑板207带动第一圆杆208在联动板205中向下滑动,支撑板207带动第一圆柱209向下运动,第一圆柱209带动第二圆柱2010向下运动远离第一固定板3,从而停止对第一固定板3进行固定,之后通过智能控制器2控制船体1行驶;当准备靠岸时,两个信号发射器2016同时向右发射频率相同激光,并通过智能控制器2对船体1的位置和角度进行智能调控,直到两个信号接收器2019同时接受到激光且接收频率相同,且通过信号发射器2016发出激光到信号接收器2019接受到激光的时间测定第一固定板3与支撑板207的距离,从而使第一固定板3与支撑板207相平行且在左右方向上对齐,然后根据信号接收器2019接收到的激光偏离其中心位置的距离,第四伸缩气缸2023带动第五固定块2024远离第二固定板2025,启动第一电机2032,第一电机2032带动丝杆2033转动,丝杆2033带动滑块204在联动架203上向前或向后运动,直到信号接收器2019接收到的激光位于其中心位置,从而使第一固定板3与支撑板207在前后方向上对齐,然后第一伸缩气缸206带动支撑板207向上运动,使第二圆柱2010穿过第一固定板3,然后第二伸缩气缸2013带动滑板2014运动,使第一固定块2015卡入至第二圆柱2010中,将第二圆柱2010固定,然后第四伸缩气缸2023带动第五固定块2024卡入至第二固定板2025中,对滑块204进行固定,完成停靠固定操作,然后游客下船;船体1停靠定位过程中会产生偏差,此时小直径的第二圆柱2010可以在偏差状态下穿过大内径的防护圈2011,然后第五伸缩气缸2030带动第二联动块2031向下运动,由于第二联动块2031与第一联动块2027相接触面为斜面,从而使第二联动块2031推动第一联动块2027向防护圈2011内壁运动,第一联动块2027带动扩张块2028运动,并对弹簧2029进行拉伸,使扩张块2028将防护圈2011压紧在第一固定板3上,从而对第一固定板3和船体1进行加固,实现在偏移状态下对第一固定板3和船体1进行固定,提高稳定性,而且橡胶材质的防护圈2011也用于对第一固定板3进行保护,避免因船体1摇晃而出现磨损现象;游客下船后,第三伸缩气缸2020带动第三固定块2021远离第四固定块2022,停止对联动架203进行固定,第四伸缩气缸2023带动第五固定块2024远离第二固定板2025,停止对滑块204固定,使得联动架203可以自由上下运动,滑块204可以自由左右运动,从而使联动板205可以自由进行上下左右方向运动,此时通过联动板205代替绳索自动将船固定在岸边,无需人工使用绳索将船体1固定,大大提高效率,且船体1随着水面飘荡时,联动板205可以跟随船体1自由活动,避免锁紧状态下各机械部件因受到船体1的拉扯力而出现松弛现象,大大提高稳定性。
41.实施例2
42.在实施例1的基础上,如图1-3和图10-11所示,遮挡组件包括有多级液压杆301、第一遮挡板302、第二支撑架303、第二电机304、第二圆杆305和第二遮挡板306;船体1前侧和后侧均固接有两个多级液压杆301;四个多级液压杆301的伸缩端之间固接有一个第一遮挡板302;第一遮挡板302上侧前部和上侧后部均焊接有一个第二支撑架303;两个第二支撑架303右侧均固接有一个第二电机304;两个第二支撑架303上部均转动连接有一个第二圆杆305;两个第二电机304的输出端分别与相邻的第二圆杆305固接;两个第二圆杆305中部均固接有一个第二遮挡板306;第二遮挡板306与相邻的第二支撑架303相接触。
43.遮挡组件还包括有磁性件307;两个第二遮挡板306的相背侧均固接有一个磁性件
307。
44.磁性件307为磁铁。
45.当船体1停靠在岸边后,启动第二电机304,第二电机304带动第二圆杆305转动,第二圆杆305带动第二遮挡板306翻转,第二遮挡板306带动磁性件307接触第一遮挡板302,然后磁性件307通过磁力将第二遮挡板306固定在第一遮挡板302上侧,关闭第二电机304,然后多级液压杆301带动第一遮挡板302向下运动至船体1上侧,对船体1进行遮盖,在恶劣天气时减小船体1整体的风阻面积,从而提高安全性能,下降后的第一遮挡板302也用于防止雨水进入至船体1中,降低工作人员的维护难度,同时,通过第二遮挡板306提高遮阳范围,第二遮挡板306自动收起后可使得不同船体1之间停靠更加紧凑,利于节约空间和便于管理。
46.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1