一种无人水下潜航器用全海深低功耗十字转向装置
1.本发明属于海洋环境观测和海底资源勘探领域,具体的说是一种无人水下潜航器用全海深低功耗十字转向装置。
背景技术:
2.近年来无人水下潜航器是一种水下观测、探测平台,目前已经广泛运用于海洋科学研究领域和军事探测领域。尾部转向装置是水下航行器的核心功能单元之一,其性能的优劣直接影响到水下航行器的整体性能。无人水下航行器通常采用十字舵、叉形舵来控制方向和姿态,比如auv、uuv等,也有部分航行器仅采用垂直舵调整航行,比如水下滑翔机等,还有部分航行器采用推进器来调整方向姿态,比如rov等。采用舵机带动舵板的方式来控制方向具有功耗低,灵活性高,噪音小等特点,因此是无人水下航行器经常选择的一种方向控制手段。但是从,目前的技术来看也存在这一些不足,比如有转向装置采用非防水舵机结合动密封的形式,导致结构复杂、功耗增大、存在泄露风险等;还有的转向装置采用齿轮、皮带、蜗轮蜗杆传动等来改变传动方向或降低转速,大大增加了功耗,且同样存在泄露风险。因此设计一款可靠性高、功耗小、结构简单的转向装置能够有效的提高无人水下潜航器的性能,对海洋装备科学技术能够起到重要的作用。
技术实现要素:
3.本发明的目的是为了克服现有技术中的不足,解决上述转向装置存在的可靠性低、功耗高、结构复杂等缺点,提供一种结构紧凑简单、功耗低、可靠性高的水下潜航器用全海深低功耗转向装置。
4.本发明的目的是通过以下技术方案实现的:
5.一种无人水下潜航器用全海深低功耗十字转向装置,包括垂直舵转向机构、水平舵转向机构、舵机舱前端盖、舵机舱体、舵机舱后端盖、补偿膜、压紧环、水密穿舱件;所述垂直舵转向机构、水平舵转向机构、舵机舱前端盖、舵机舱后端盖均与舵机舱体连接;舵机舱前端盖、舵机舱后端盖与舵机舱体之间均设有o型圈密封;所述的补偿膜与舵机舱后端盖连接,并通过压紧环压紧;所述压紧环与舵机舱后端盖通过螺栓固定连接。
6.进一步的,所述的垂直舵转向机构包括垂直舵轴承盖a、垂直舵输出轴a、垂直舵轴承座a、垂直舵输出轴轴承a、垂直舵联轴器舱a、垂直舵外磁联轴器片a、垂直舵内磁联轴器片a、弓字连接件a、垂直舵随动轴、垂直舵随动轴轴承、垂直舵机后盖、垂直舵机固定架、垂直舵机、垂直舵机输出轴连接件、垂直舵内磁联轴器片b、垂直舵外磁联轴器片b、垂直舵输出轴b、垂直舵输出轴轴承b、垂直舵轴承盖b、垂直舵轴承座b、垂直舵联轴器舱b;
7.所述的垂直舵联轴器舱a与舵机舱体外壁固定连接并通过o型圈进行密封,垂直舵联轴器舱a上部从下到上依次通过螺栓与垂直舵轴承座a、垂直舵轴承盖a固定连接;所述的垂直舵输出轴轴承a与垂直舵轴承座a连接,所述的垂直舵输出轴a与垂直舵输出轴轴承a连接;所述的垂直舵外磁联轴器片a与垂直舵输出轴a固定连接;所述的垂直舵内磁联轴器片a
依次与弓字连接件a的一端、垂直舵随动轴、垂直舵随动轴轴承、垂直舵机后盖、垂直舵机固定架、垂直舵机连接;
8.所述的垂直舵机固定架通过螺栓固定在舵机舱体上;所述的垂直舵机输出轴与垂直舵机输出轴连接件固定连接,所述的垂直舵机输出轴连接件与弓字连接件a的另一端固定连接;所述的垂直舵内磁联轴器片b通过紧定螺钉与弓字连接件a固定连接;所述的垂直舵轴承盖b与垂直舵轴承座b通过螺栓固定连接;所述的垂直舵轴承座b通过螺栓与垂直舵联轴器舱b固定连接;所述的垂直舵联轴器舱b与舵机舱体固定连接并通过o型圈进行密封;所述的垂直舵输出轴b与垂直舵输出轴轴承b的内环连接,垂直舵输出轴轴承b的外环与垂直舵轴承座b连接;所述的垂直舵外联轴器片b与垂直舵输出轴b固定连接。
9.进一步的,所述的水平舵转向机构包括水平舵联轴器舱a、水平舵轴承座a、水平舵输出轴轴承a、水平舵输出轴a、水平舵轴承盖a、水平舵外磁联轴器片a、水平舵内磁联轴器片a、弓字连接件b、水平舵随动轴、水平舵随动轴轴承、水平舵机后盖、水平舵机固定架、水平舵机、水平舵机输出轴连接件、水平舵内磁联轴器片b、水平舵联轴器舱b、水平舵轴承座b、水平舵外磁联轴器片b、水平舵输出轴轴承b、水平舵轴承盖b、水平舵输出轴b;
10.所述的水平舵轴承盖a与水平舵轴承座a通过螺栓固定连接;所述的水平舵轴承座a与水平舵联轴器舱a通过螺栓固定连接,所述的水平舵联轴器舱a与舵机舱体固定连接并通过o型圈进行密封;所述的水平舵输出轴a与水平舵输出轴轴承a连接;所述的水平舵输出轴轴承a与水平舵轴承座a连接;所述的水平舵外磁联轴器片a与水平舵输出轴a通过紧定螺钉固定连接;所述的水平舵内磁联轴器片a与弓字连接件b的一端通过紧定螺钉固定连接;所述的弓字连接件b与水平舵随动轴固定连接;所述的水平舵随动轴与水平舵随动轴轴承内环连接;所述的水平舵随动轴轴承外环与水平舵机后盖连接;所述的水平舵机后盖与水平舵机固定架通过螺栓固定连接;所述的水平舵机与水平舵机固定架通过螺栓固定连接;所述的水平舵机固定架通过螺栓固定在舵机舱体上;所述的水平舵机输出轴与水平舵机输出轴连接件固定连接,所述的水平舵机输出轴连接件与弓字连接件b的另一端固定连接;所述的水平舵内磁联轴器片b通过紧定螺钉与弓字连接件b固定连接;所述的水平舵轴承盖b与水平舵轴承座b通过螺栓固定连接;所述的水平舵轴承座b通过螺栓与水平舵联轴器舱b固定连接;所述的水平舵联轴器舱b与舵机舱体固定连接并通过o型圈进行密封;所述的水平舵输出轴b与水平舵输出轴轴承b的内环连接,水平舵输出轴轴承b的外环与水平舵轴承座b连接;所述的水平舵外联轴器片b与水平舵输出轴b通过紧定螺钉固定连接。
11.进一步的,所述舵机舱体中间为四面方形舱体,每一个面上均开有磁联轴器舱安装孔和安装凸台,安装凸台上设有舱体密封槽和螺纹孔,方便与磁联轴器舱的安装和密封,在每一面的内测设有固定架安装凸台,凸台上设有螺纹孔,用以与垂直舵机固定架和水平舵机固定架的连接;所述的舵机舱体两端为圆形端面,圆形端面上设有端面密封槽,在端面密封槽的外侧均开有通孔,以方便舵机舱前后端盖的安装和密封。
12.进一步的,所述的补偿膜边缘设有o型圈结构,o型圈结构通过与压紧环的密封槽相配合,保证密封效果。
13.进一步的,所述的补偿膜为柔性材料,具体采用氢化丁晴橡胶材质。
14.与现有技术相比,本发明的技术方案所带来的有益效果是:
15.1.本发明转向装置通过壳体内部舵机带动磁耦合联轴器的转动,磁耦合联轴器的
内轴片和外轴片被壳体隔开,不存在动密封结构,每个舵机带动两组磁耦合联轴器,共两个舵机带动四个转向输出轴,能够大大降低多动力源、动密封摩擦带来的损耗,有效提高转向效率。除此之外,由于舵机舱体内部充满绝缘油,壳体上设有补偿膜,用以补偿由海水压力带来的壳体形变或壳体内部绝缘油压缩,具有全海深耐压防水功能,能够在全海深的工作环境下正常工作,适用于各种深度的水下无人潜航器。
16.2.本发明采用水平舵垂直舵一体式设计,具有垂直、水平两个转向控制功能,结构紧凑,尺寸小巧,能够适用于对空间要求较高的微小型水下无人潜航器。
17.3.本发明采用自补偿的方式进行压力补偿,能够满足全海深工作环境。
18.4.本发明采用的水平舵机和垂直舵机均带有自锁功能,在不用时可以断电保持位置,能够节省能源。
19.5.本发明中水平转向舵机、垂直转向舵机通过带动磁耦合联轴器部分旋转,带动外部输出轴的转动,补偿膜用来补偿深水压力,水密穿舱件用以壳体内外电气通信,每一个舵机带动两个输出轴,并且磁耦合联轴器传递扭矩不需要实体接触,相比于动密封具有更高的传动效率,能够更好的降低功耗,舱内与舱外完全静态隔绝密封,使得本发明更加安全可靠。
附图说明
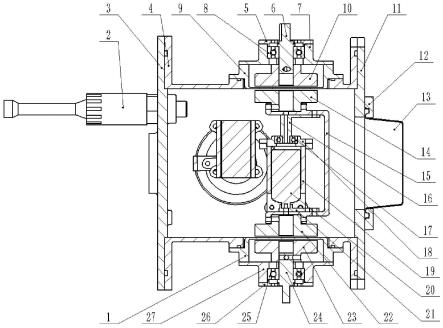
20.图1为本发明中垂直舵转向机构的剖视结构示意图。
21.图2为本发明中水平舵转向机构的剖视结构示意图。
22.图3为本发明中舵机舱体的结构原理图。
23.图4为本发明中补偿膜的结构示意图。
24.附图标记:1-垂直舵联轴器舱b;2-水密穿舱件;3-舵机舱前端盖;4-舵机舱体;5-垂直舵轴承盖a;6-垂直舵输出轴a;7-垂直舵轴承座a;8-垂直舵输出轴轴承a;9-垂直舵联轴器舱a;10-垂直舵外磁联轴器片a;11-舵机舱后端盖;12-压紧环;13-补偿膜;14-垂直舵内磁联轴器片a;15-弓字连接件a;16-垂直舵随动轴;17-垂直舵随动轴轴承;18-垂直舵机后盖;19-垂直舵机固定架;20-垂直舵机;21-垂直舵机输出轴连接件;22-垂直舵内磁联轴器片b;23-垂直舵外磁联轴器片b;24-垂直舵输出轴b;25-垂直舵输出轴轴承b;26-垂直舵轴承盖b;27-垂直舵轴承座b;28-水平舵联轴器舱a;29-水平舵轴承座a;30-水平舵输出轴轴承a;31-水平舵输出轴a;32-水平舵轴承盖a;33-水平舵外磁联轴器片a;34-水平舵内磁联轴器片a;35-弓字连接件b;36-水平舵随动轴;37-水平舵随动轴轴承;38-水平舵机后盖;39-水平舵机固定架;40-水平舵机;41-水平舵机输出轴连接件;42-水平舵内磁联轴器片b;43-水平舵联轴器舱b;44-水平舵轴承座b;45-水平舵外磁联轴器片b;46-水平舵输出轴轴承b;47-水平舵轴承盖b;48-水平舵输出轴b;49-固定架安装凸台;50-安装凸台;51-舱体密封槽;52-端面密封槽。
具体实施方式
25.以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
26.如图1至图4所示,本实施例提供一种无人水下潜航器用全海深低功耗十字转向装
置,包括垂直舵转向机构、水平舵转向机构、舵机舱前端盖3、舵机舱体4、舵机舱后端盖11、补偿膜13、压紧环12、水密穿舱件2;垂直舵转向机构与舵机舱体4连接;水平舵转向机构与舱体舱体4连接;水密穿舱件2与舵机舱前端盖3连接;舵机舱前端盖3与舵机舱体4连接,通过o型圈密封;舵机舱后端盖11与舵机舱体4连接,通过o型圈密封;补偿膜13与舵机舱后端盖11连接,通过压紧环12压紧;压紧环12与舵机舱后端盖11通过螺栓固定连接;
27.具体的,见图1,垂直舵转向机构包括垂直舵轴承盖a5、垂直舵输出轴a6、垂直舵轴承座a7、垂直舵输出轴轴承a8、垂直舵联轴器舱a9、垂直舵外磁联轴器片a10、垂直舵内磁联轴器片a14、弓字连接件a15、垂直舵随动轴16、垂直舵随动轴轴承17、垂直舵机后盖18、垂直舵机固定架19、垂直舵机20、垂直舵机输出轴连接件21、垂直舵内磁联轴器片b22、垂直舵外磁联轴器片b23、垂直舵输出轴b24、垂直舵输出轴轴承b25、垂直舵轴承盖b26、垂直舵轴承座b27、垂直舵联轴器舱b1;垂直舵轴承盖a5与垂直舵轴承座a7通过螺栓固定连接;垂直舵轴承座a7与垂直舵联轴器舱a9通过螺栓固定连接,垂直舵联轴器舱a9与舵机舱体4通过螺栓固定连接,通过o型圈进行密封;垂直舵输出轴a6与垂直舵输出轴轴承a8连接;垂直舵输出轴轴承a8与垂直舵轴承座a7连接;垂直舵外磁联轴器片a10与垂直舵输出轴a6通过紧定螺钉固定连接;垂直舵内磁联轴器片a14与弓字连接件a15通过紧定螺钉固定连接;弓字连接件a15与垂直舵随动轴16固定连接;垂直舵随动轴16与垂直舵随动轴轴承17内环连接;垂直舵随动轴轴承17外环与垂直舵机后盖18连接;垂直舵机后盖18与垂直舵机固定架19通过螺栓固定连接;垂直舵机20与垂直舵机固定架19通过螺栓固定连接;垂直舵机固定架19通过螺栓固定在舵机舱体4上;垂直舵机20输出轴与垂直舵机输出轴连接件21固定连接,垂直舵机输出轴连接件21与弓字连接件a15的另一端固定连接;垂直舵内磁联轴器片b22通过紧定螺钉与弓字连接件a15固定连接;垂直舵轴承盖b26与垂直舵轴承座b27通过螺栓固定连接;垂直舵轴承座b27通过螺栓与垂直舵联轴器舱b1固定连接;垂直舵联轴器舱b1与舵机舱体4通过螺栓固定连接,通过o型圈进行密封;垂直舵输出轴b24与垂直舵输出轴轴承b25的内环连接,垂直舵输出轴轴承b25的外环与垂直舵轴承座b27连接;垂直舵外联轴器片b23与垂直舵输出轴b24通过紧定螺钉固定连接;
28.如图2所示,水平舵转向机构包括水平舵联轴器舱a28、水平舵轴承座a29、水平舵输出轴轴承a30、水平舵输出轴a31、水平舵轴承盖a32、水平舵外磁联轴器片a33、水平舵内磁联轴器片a34、弓字连接件b35、水平舵随动轴36、水平舵随动轴轴承37、水平舵机后盖38、水平舵机固定架39、水平舵机40、水平舵机输出轴连接件41、水平舵内磁联轴器片b42、水平舵联轴器舱b43、水平舵轴承座b44、水平舵外磁联轴器片b45、水平舵输出轴轴承b46、水平舵轴承盖b47、水平舵输出轴b48;水平舵轴承盖a32与水平舵轴承座a29通过螺栓固定连接;水平舵轴承座a29与水平舵联轴器舱a28通过螺栓固定连接,水平舵联轴器舱a28与舵机舱体4通过螺栓固定连接,通过o型圈进行密封;水平舵输出轴a31与水平舵输出轴轴承a30连接;水平舵输出轴轴承a30与水平舵轴承座a29连接;水平舵外磁联轴器片a33与水平舵输出轴a31通过紧定螺钉固定连接;水平舵内磁联轴器片a34与弓字连接件b35通过紧定螺钉固定连接;弓字连接件b35与水平舵随动轴36固定连接;水平舵随动轴36与水平舵随动轴轴承37内环连接;水平舵随动轴轴承37外环与水平舵机后盖38连接;水平舵机后盖38与水平舵机固定架39通过螺栓固定连接;水平舵机40与水平舵机固定架39通过螺栓固定连接;水平舵机固定架39通过螺栓固定在舵机舱体4上;水平舵机40输出轴与水平舵机输出轴连接件
41固定连接,水平舵机输出轴连接件41与弓字连接件b35的另一端固定连接;水平舵内磁联轴器片b42通过紧定螺钉与弓字连接件b35固定连接;水平舵轴承盖b47与水平舵轴承座b44通过螺栓固定连接;水平舵轴承座b44通过螺栓与水平舵联轴器舱b43固定连接;水平舵联轴器舱b43与舵机舱体4通过螺栓固定连接,通过o型圈进行密封;水平舵输出轴b48与水平舵输出轴轴承b46的内环连接,水平舵输出轴轴承b46的外环与水平舵轴承座b44连接;水平舵外联轴器片b45与水平舵输出轴b48通过紧定螺钉固定连接。
29.如图3所示,舵机舱体中间为四面方形舱体,每一个面上均开有磁联轴器舱安装孔和安装凸台50,安装凸台上设有舱体密封槽51和螺纹孔,方便与磁联轴器舱的安装和密封,在每一面的内测设有固定架安装凸台49,凸台49上设有螺纹孔,用以与垂直舵机固定架19和水平舵机固定架39的连接;舵机舱体4两端为圆形端面,圆形端面上设有端面密封槽52,在密封槽的外侧均开有通孔,以方便舵机舱前后端盖的安装和密封;其中磁联轴器舱包括垂直舵联轴器舱和水平舵联轴器舱体。
30.如图4所示,补偿膜13边缘设有o型圈结构,该结构通过与压紧环12的密封槽相配合,可以保证密封效果;补偿膜13为柔性材料,当外部压力增大时,补偿膜13能够向舵机舱体4内测弯曲凹陷。
31.具体的,本实施例的十字转向装置工作原理可详述如下:
32.当需要垂直舵输出轴a6、垂直舵输出轴b24转动时,通过控制器控制垂直舵机20输出轴转动,由于垂直舵机20输出轴与垂直舵机输出轴连接件21、弓字连接件a15固定连接,因此带动弓字连接件a15转动,弓字连接件a15的一端与垂直舵内磁联轴器片a14固定连接,另一端与垂直舵内磁联轴器片b22固定连接,因此带动垂直舵内磁联轴器片a14和垂直舵内磁联轴器b22的转动,由于磁联轴器的磁耦合效应,垂直舵外磁联轴器片a10会跟随垂直舵内磁联轴片a14转动,垂直舵外磁联轴器片b23会跟随垂直舵内磁联轴器b22转动,由于垂直舵外磁联轴器片a10与垂直舵输出轴a6固定连接,垂直舵外磁联轴器片b23与垂直舵输出轴b24固定连接,因此带动垂直舵输出轴a6与垂直舵输出轴b24的转动。本发明的旋转装置通过控制器直接控制舵机的旋转角度,但没有位置信号反馈功能,避免了编码器等位置反馈元器件带来的损耗,最大程度的降低了功耗。
33.同理,当需要水平舵输出轴a31和水平舵输出轴b48转动时,通过控制器控制水平舵机40输出轴的旋转即可。
34.本发明并不限于上文描述的实施方式。以上对具体实施方式的描述旨在描述和说明本发明的技术方案,上述的具体实施方式仅仅是示意性的,并不是限制性的。在不脱离本发明宗旨和权利要求所保护的范围情况下,本领域的普通技术人员在本发明的启示下还可做出很多形式的具体变换,这些均属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1