水上救援机器人
1.本发明涉及水上救援设备领域,尤其涉及一种水上救援机器人。
背景技术:
2.水上救援是一项水上的救援活动。包括快速出动、救护编队、水上救生、输送灾民、抢运物资等项目。公告号cn112874727b公开了一种u型水上救援机器人,这种机器人包括u型充气气囊,u型充气气囊的两u型端对称设置有推进器,u型充气气囊与推进器之间为可拆卸连接,但是这种救援机器人实际在使用时面临一个问题,即设置的u型重启气囊,当遇到落多个落水者时,无法多角度的向落水的人投送游泳圈,从而可能会影响救援的时间。
技术实现要素:
3.本发明针对上述问题,提出了一种水上救援机器人。
4.一种水上救援机器人,包括船体,安装在船体侧面的把手,所述船体顶面设置有转动机构和抛投机构;
5.所述转动机构包括动力部和转动部,所述动力部位于转动部底面;
6.所述动力部包括第一电机框,所述第一电机框位于船体内部,所述第一电机框底面与船体内部底面固定连接,所述第一电机框内部设置有第一电机,所述第一电机输出杆上端面固定设置有第一齿轮,所述第一齿轮侧面设置有第一螺纹杆,所述第一螺纹杆外表面转动套设有第二齿轮,所述第一齿轮侧面与第二齿轮侧面相互啮合;
7.所述转动部包括第一圆盘,所述第一圆盘顶面固定设置有第二圆盘,所述第二圆盘顶面内壁贯通开设有两层环形槽,所述第二圆盘顶面设置有出料桶。
8.可选的,所述抛投机构包括第二风机框,所述船体左侧面贯通开设有第一腔体,所述第二风机框位于第一腔体内壁,所述第二风机框内部设置有第二电机,所述第二电机输出杆左端面固定贯穿第二风机框左侧内壁延伸至第二风机框左侧面,通过设置第二风机框有效的保护第二电机不会进水。
9.可选的,所述第二电机输出杆左端面固定设置有第一扇叶,所述第一螺纹杆位于第一电机框内部,所述第一螺纹杆外表面与第一电机框内部底面转动连接,所述第一圆盘位于第一螺纹杆底面,通过设置第一圆盘有效的带动环形槽进行转动。
10.可选的,所述第一圆盘底面与第一螺纹杆上端面转动连接,所述出料桶内部底面固定设置有第一液压杆,所述第一液压杆顶面固定设置有第一支撑板,所述第一支撑板顶面放置有游泳圈,通过设置第一支撑板方便游泳圈进行出料。
11.可选的,所述第一电机输出杆下端面从上至下固定贯穿第一电机框底面、船体底面内壁延伸至船体底面,所述第一电机输出杆下端面固定设置有涡轮风扇,通过设置涡轮风扇有效的对船体方向进行偏转。
12.可选的,所述环形槽内部设置有第二支撑杆,所述第二支撑杆底面固定设置有滑轮,所述滑轮外表面与环形槽内壁滑动连接,所述第二支撑杆顶面设置有喷射箱,通过设置
喷射箱有效的将游泳圈进行抛投。
13.可选的,所述喷射箱侧面贯通开设有第二腔体,所述第二腔体内部左侧面固定设置有第一支撑块,所述第一支撑块侧面固定设置有第一弹簧,所述第一弹簧侧面固定设置有第一齿板,所述第一齿板顶面固定设置有支撑杆,所述支撑杆顶面与第二腔体内部顶面接触设置,所述支撑杆侧面固定设置有第二弹簧,所述第二弹簧固定设置有第二支撑板,所述第二支撑板顶面与第二腔体内部顶面固定连接,通过设置第一齿板可以更好的挤压第一弹簧。
14.可选的,所述第一齿板底面设置有第三电机,所述第三电机后侧面与第二腔体内部侧面固定连接,所述第三电机输出杆前端面设置有两个皮带轮,两个所述皮带轮通过皮带传动,所述第三电机输出杆前端面与左侧皮带轮内壁固定连接,通过设置两个皮带轮可以让第三电机更好的传动。
15.可选的,右侧皮带轮后侧设置有第二螺纹杆,所述第二螺纹杆外表面与第二腔体内部侧面转动连接,所述第二螺纹杆外表面与右侧皮带轮内壁转动连接,通过设置第二螺纹杆更好的带动半齿轮进行转动。
16.可选的,所述第二螺纹杆外表面转动设置有半齿轮,所述半齿轮位于第一齿板侧面,所述半齿轮侧面与第一齿板侧面相互啮合,所述第一齿板侧面固定设置有发射板,所述发射板侧面与第二腔体内部侧面接触设置,通过设置发射板可以有效的将游泳圈进行发射。
17.本发明的有益效果是:该水上救援机器人,通过设置转动机构,利用转动机构内部的动力部和转动部相互配合,从而快速将游泳圈进行抛出;通过抛投机构内部设置的第二电机带动涡轮风扇进行反转,从而控制船体的方向;当遇到落水者时,启动第二电机带动第一扇叶进行转动,使得船体进行移动;从而快速对多个方向空投游泳圈,有效的为救援落水者提供了宝贵的时间。
附图说明:
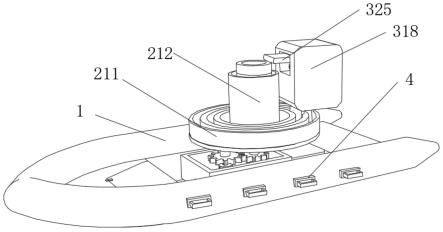
18.图1为水上救援机器人结构立体正视图;
19.图2为水上救援机器人结构立体后视图;
20.图3为水上救援机器人结构立体正面剖视图;
21.图4为水上救援机器人结构立体第二圆盘局部放大图;
22.图5为水上救援机器人结构立体喷射箱局部放大图;
23.图6为水上救援机器人结构立体出料桶局部放大图;
24.图7为水上救援机器人结构立体第二风机框局部放大图;
25.图8为本发明结构立体涡轮风扇局部放大图。图中各附图标记为:1、船体;2、转动机构;20、第一电机框;201、第一电机;202、第一齿轮;203、第一螺纹杆;21、第一圆盘;211、第二圆盘;212、出料桶;3、抛投机构;30、第二风机框;303、第二齿轮;311、第二电机;312、第一扇叶;313、第一液压杆;314、第一支撑板;315、游泳圈;316、涡轮风扇;317、第二支撑杆;318、喷射箱;319、第一弹簧;320、第一齿板;321、第三电机;322、皮带轮;323、第二螺纹杆;324、半齿轮;325、发射板;327、第二支撑板;328、第二弹簧328;4、扶手。
具体实施方式:
26.下面结合各附图,对本发明做详细描述。
27.如附图1~附图8所示,本发明提供一种技术方案:一种水上救援机器人,包括船体1,安装在船体1侧面的把手4,船体1顶面设置有转动机构2和抛投机构3;
28.转动机构2包括动力部和转动部,动力部位于转动部底面;
29.动力部包括第一电机框20,第一电机框20位于船体1内部,第一电机框20底面与船体1内部底面固定连接,第一电机框20内部设置有第一电机201,第一电机201输出杆上端面固定设置有第一齿轮202,第一齿轮202侧面设置有第一螺纹杆203,第一螺纹杆203外表面转动套设有第二齿轮203,第一齿轮202侧面与第二齿轮203侧面相互啮合;
30.转动部包括第一圆盘21,第一圆盘21顶面固定设置有第二圆盘211,第二圆盘211顶面内壁贯通开设有两层环形槽,第二圆盘211顶面设置有出料桶212。
31.抛投机构3包括第二风机框30,船体1左侧面贯通开设有第一腔体,第二风机框30位于第一腔体内壁,第二风机框30内部设置有第二电机311,第二电机311输出杆左端面固定贯穿第二风机框30左侧内壁延伸至第二风机框30左侧面,通过设置第二风机框30有效的保护第二电机311不会进水,第二电机311输出杆左端面固定设置有第一扇叶312,第一螺纹杆203位于第一电机框20内部,第一螺纹杆203外表面与第一电机框20内部底面转动连接,第一圆盘21位于第一螺纹杆203底面,通过设置第一圆盘21有效的带动环形槽进行转动,第一圆盘21底面与第一螺纹杆203上端面转动连接,利用转动机构内部的动力部和转动部相互配合,从而快速将游泳圈315进行抛出,通过抛投机构内部设置的第二电机311带动涡轮风扇316进行反转,从而控制船体1的方向。
32.出料桶212内部底面固定设置有第一液压杆313,第一液压杆313顶面固定设置有第一支撑板314,第一支撑板314顶面放置有游泳圈315,通过设置第一支撑板314方便游泳圈315进行出料,第一电机201输出杆下端面从上至下固定贯穿第一电机框20底面、船体1底面内壁延伸至船体1底面,第一电机201输出杆下端面固定设置有涡轮风扇316,通过设置涡轮风扇316有效的对船体1方向进行偏转,环形槽内部设置有第二支撑杆317。
33.第二支撑杆317底面固定设置有滑轮,滑轮外表面与环形槽内壁滑动连接,第二支撑杆317顶面设置有喷射箱318,通过设置喷射箱318有效的将游泳圈315进行抛投,喷射箱318侧面贯通开设有第二腔体,第二腔体内部左侧面固定设置有第一支撑块,第一支撑块侧面固定设置有第一弹簧319,第一弹簧319侧面固定设置有第一齿板320,第一齿板320顶面固定设置有支撑杆,支撑杆顶面与第二腔体内部顶面接触设置,支撑杆侧面固定设置有第二弹簧328,第二弹簧328固定设置有第二支撑板327,第二支撑板327顶面与第二腔体内部顶面固定连接,通过设置第一齿板320可以更好的挤压第一弹簧319,当遇到落水者时,启动第二电机311带动第一扇叶312进行转动,使得船体1进行移动,从而快速对多个方向空投游泳圈315,有效的为救援落水者提供了宝贵的时间。
34.第一齿板320底面设置有第三电机321,第三电机321后侧面与第二腔体内部侧面固定连接,第三电机321输出杆前端面设置有两个皮带轮322,两个皮带轮322通过皮带传动,第三电机321输出杆前端面与左侧皮带轮322内壁固定连接,通过设置两个皮带轮322可以让第三电机321更好的传动,右侧皮带轮322后侧设置有第二螺纹杆323,第二螺纹杆323外表面与第二腔体内部侧面转动连接。
35.第二螺纹杆323外表面与右侧皮带轮322内壁转动连接,通过设置第二螺纹杆323更好的带动半齿轮324进行转动,第二螺纹杆323外表面转动设置有半齿轮324,半齿轮324位于第一齿板320侧面,半齿轮324侧面与第一齿板320侧面相互啮合,第一齿板320侧面固定设置有发射板325,发射板325侧面与第二腔体内部侧面接触设置,通过设置发射板325可以有效的将游泳圈315进行发射。
36.本种救援机器人的使用方法如下,当一种水上救援机器人使用时,发现落水者时,第一步,先转动第二电机311,通过反转第二电机311带动涡轮风扇316进行偏转方向,从而确定落水者的大致方位。
37.第二步,启动第二电机311带动第一扇叶312进行转动,使得船体1快速接近落水者。
38.第三步,利用第一电机201带动第一齿轮202进行转动,通过第一齿轮202与第二齿轮303进行相互啮合,使得第二齿轮303带动第一螺纹杆203进行转动,通过第一螺纹杆203带动第一圆盘21进行转动,通过第二圆盘211顶面贯通开设的环形槽与滑轮进行移动设置,从而使得滑轮带动第二支撑杆317进行转动。
39.第四步,通过第二支撑杆317顶面设置的喷射箱318,通过第二腔体内部设置的第三电机321带动两个皮带轮322进行转动,使得皮带轮322带动半齿轮324进行转动,通过半齿轮324与第一齿板320进行相互啮合,从而使得第一齿板320挤压第一弹簧319向内侧运动,通过第一齿板320与发射板325进行挤压运动,使得发射板325快速挤压游泳圈315向各个方向进行空投。
40.以上所述仅为本发明的优选实施例,并非因此即限制本发明的专利保护范围,凡是运用本发明说明书内容所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1