水接合装置致动器的制作方法
本公开一般涉及一种改进的水接合系统和装置,用于提供船舶的最佳性能和动态主动运动控制(dac)。更具体地,本公开致力于一种具有旋转致动器的水接合装置致动器,该旋转致动器被配置并能够用于弧形叶片的水平安装和快速部署,以优化船舶的动态主动控制,同时最小化船舶的这种动态主动控制所需的功耗。
背景技术:
1、以下术语和相关定义用于海上稳定行业。“配平(trim)控制”是指对船舶的围绕横向或俯仰轴线的平均角度的控制,在1秒或更长时间内进行平均。“侧滚控制”或“侧倾(roll)控制”是指对船舶的围绕纵向或侧倾轴线的平均角度的控制,在1秒或更长时间内进行平均。“横摆(yaw)控制”是指对船舶的围绕横摆轴线的平均角度的控制,在1秒钟或更长时间内进行平均。“水接合装置(water engagement device)”或“wed”是指一种机械或机电装置,其被配置为通过在船舶沿某个(或向前)方向行驶时选择性地使该装置与船舶船尾横挡(transom)表面下方或附近的水流接合或进入水流,或通过在船舶沿向前方向操作期间改变该装置相对于水流的迎角来产生船舶的可变升力。在本文公开的系统中,wed也可以被称为控制器,并且提到控制器和/或wed时是指同一装置。wed德尔塔位置被定义为左舷和右舷wed部署之间的差异。“部署”是指wed与水流的选择性接合或进入水流,或wed迎角的变化。船舶的侧倾力矩是施加在船舶上的引起船舶围绕其纵向或侧倾轴线旋转的力的结果。船舶的俯仰力矩是施加在船舶上的引起船舶围绕其横向或俯仰轴线旋转的力的结果。船舶的横摆力矩是施加在船舶上的引起船舶围绕其垂直或横摆轴线旋转的力的结果。例如,(1)如果在船舶中左舷和右舷wed不对称地部署,则能够产生“侧倾力矩”,这会引起船舶侧倾;(2)当左舷和右舷wed不对称地部署时,能够产生“横摆力矩”,这会引起航向变化;和(3)如果左舷和右舷wed对称地部署,或者如果单个wed围绕船舶的中心部署,则能够产生“俯仰力矩”,这会引起船舶俯仰。
2、在本文公开的系统中,wed被称为控制器,并且提到控制器和/或wed时是指同一装置。wed德尔塔位置被定义为左舷和右舷wed部署之间的差异。“部署”是指wed与水流的选择性接合或进入水流,或wed迎角的变化。船舶的侧倾力矩是施加在船舶上的引起船舶围绕其纵向或侧倾轴线旋转的力的结果。船舶的俯仰力矩是施加在船舶上的引起船舶围绕其横向或俯仰轴线旋转的力的结果。船舶的横摆力矩是施加在船舶上的引起船舶围绕其垂直或横摆轴线旋转的力的结果。
3、如果在船舶中左舷和右舷wed不对称地部署,则能够产生“侧倾力矩”,这会引起船舶侧倾。当左舷和右舷wed不对称地部署时,能够产生“横摆力矩”,这会引起航向变化,并且如果左舷和右舷wed对称地部署,或者如果单个wed围绕船舶的中心部署,则能够产生“俯仰力矩”,这会引起船舶俯仰。
4、传统的海上稳定技术允许wed按比例部署以产生连续升力,同时允许调整船舶的配平和侧倾角度。商业上可买到的wed的几个例子(无论如何都不被认为是详尽的)是拦截器、配平片、翅片和其他类似的装置,它们可以以类似的方式接合并提供类似的功能。海上稳定技术是体验水上巡航的乐趣而不会伴随着船只的随机环境干扰的关键。这些干扰(例如,突然的意外侧倾)对乘船人来说可能是令人讨厌的和破坏性的。
5、在现有的技术系统中,wed被设计和配置为控制侧倾和配平,以使船舶在侧倾轴线和俯仰轴线上达到平均角度。娱乐市场中使用的小型船舶通常具有手动致动的wed,而商业空间中操作的大型船舶使用自动致动系统来使运动稳定。然而,这种现有技术的系统通常是高功率装置,并且具有在船尾横挡上安装的一定的最小垂直高度要求,以便实现wed的快速部署(部署速度为100mm/s或更快)。如图4所示,具有一定的最小高垂直高度并安装在船舶的船尾横挡上的线性致动系统如下所示。dac(通过本文公开的wed的部署)被配置为同时控制船舶的侧倾、俯仰和横摆轴线上的加速度、速率和角度。
6、致动器的传统的快速线性运动在获得不透水密封方面是有困难的。这主要是由于进行密封的轴表面会长期不断地发生变化,并且轴表面或密封件上的任何海洋生长物都必须被清理。此外,轴的各节段必须从干净的密封环境移动到脏的盐水环境。与本文公开的快速线性运动密封相反,使快速旋转运动不透水要经济得多,因为它总是密封相同的轴表面。
7、目前可用的使用线性液压致动器的娱乐和商业翅片侧倾稳定系统具有许多缺点。例如,用于部署wed的致动器几乎总是位于船舶内部。在致动器操作期间,由于致动器位于船舶内部,与任何密封失效相关的液压油泄漏不会进入水中(例如,大海)。传统的致动器大多配置有位于船舶内部的电动线性致动器,以防止密封失效对电动机造成损坏。换言之,传统的wed致动器不包括没有线性致动器和/或线性轴密封的wed。本文公开的wed致动器允许将速度致动器安装在船舶外部,这显著减少了安装问题和伴随的成本。
8、如本文所公开的,使用具有凹弧形叶片的旋转致动器的wed致动器可以解决现有技术wed致动器系统的各种缺点,包括但不限于,与当前可用的最快的娱乐性海上稳定性控制系统相比,能够在显著更短的时间内部署wed,100mm/s或更快地部署/收回。由于wed在密封的清洁环境中与弧形叶片和多个轴承耦合,轴密封件的数量有限,因此该wed致动器提供显著的功率节省。
9、本公开致力于一种具有独特设计和配置的旋转致动器的wed致动器,该旋转致动器能够在没有线性轴密封的情况下快速部署(部署速度为100mm/s或更快)wed,用于提供对船舶的动态主动控制(dac)。
技术实现思路
1、一种水接合装置致动器系统包括致动器组件,该致动器组件包括旋转致动器,该旋转致动器连接到适于连接到船舶的支撑结构,使得旋转致动器的纵向轴线设置成横向于船舶的纵向轴线。旋转致动器包括从动轴(driven shaft)和与所述从动轴相对的无驱从轴(undriven slave shaft)。水接合装置连接到所述从动轴,并且控制器通信地连接到所述旋转致动器以命令所述从动轴的旋转,使得所述水接合装置自动地移动到缩回位置和部署位置之间的位置,以便提供对船舶的动态主动控制。
2、包括弧形叶片的所述水接合装置连接到所述从动轴,并且至少一个编码器设置在将所述无驱从轴与所述从动轴分隔开的空间中。在另一个实施例中,所述弧形叶片是凹弧形叶片。所述控制器与所述旋转致动器通信连接,该控制器被配置为命令所述从动轴的旋转,使得在海上操作期间所述水接合装置自动地移动到缩回位置和部署位置之间的位置。所述旋转致动器还被配置为仅由两个旋转轴密封件吸收船舶产生的任何水动力阻力载荷。此外,所述旋转致动器被配置为通过将所述弧形叶片以100mm/s或更快的速度自动部署到水中来抵消任何意外干扰,并且提供对船舶的动态主动控制。
3、所述致动器组件包括旋转轴密封件,所述旋转轴密封件被配置为容易安装和快速垂直部署用于船舶的动态主动控制的水接合装置。所述旋转致动器设置在适于连接到船舶的支撑结构的致动器板和密封板之间,使得所述旋转致动器的纵向轴线设置成横向于船舶的纵向轴线。除了所述密封板和所述致动器板之外,所述支撑结构还包括楔块和船尾横挡板,这些部件相互连接,以便在海上作业期间为所述水接合装置(所述弧形叶片)的缩回和部署提供结构支撑。连接到所述水接合装置致动器(所述旋转致动器)的所述水接合装置或所述弧形叶片包括封闭在清洁密封环境中的至少一对轴承。
4、如上文所述和下文进一步详细说明的,所述水接合装置致动器组件,特别是所述旋转致动器,被进一步配置为仅由两个旋转轴密封件吸收船舶产生的任何水动力阻力载荷。所述支撑结构可以安装在船舶的水线上方或下方,使得由所述弧形叶片的部署产生的水动力在所述旋转致动器的从动轴的旋转中心处相交,如下文进一步详细描述的。所述控制器被进一步配置为命令所述旋转致动器旋转,使得当所述旋转致动器失效或停用时,所述水接合装置被移动到缩回位置。所述旋转致动器还包括分别在第一端和第二端处集成到所述从动轴的第一致动器臂和第二致动器臂,所述第一致动臂和所述第二致动臂在径向方向上从所述旋转促动器沿着垂直于所述旋转致动器的纵向轴线的平面延伸。在另一个实施例中,所述第一致动器臂和所述第二致动器臂进一步连接到叶片支撑臂或者所述水接合装置或所述旋转致动器组件内的其他等效结构。所述弧形叶片通过所述第一致动器臂和所述第二致动器臂可旋转地连接到所述旋转致动器,该weda系统提供弧形叶片以100mm/s或更快的速度部署到水中。
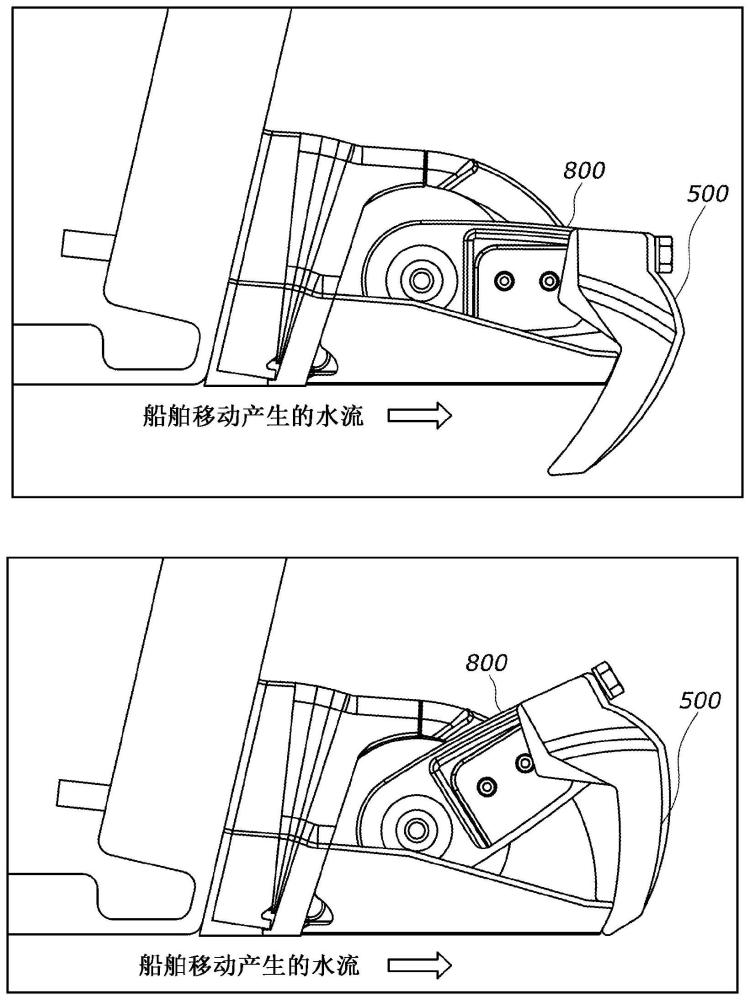
5、将该weda安装在船舶船尾横挡上不需要很大的功率来克服与叶片上的力相关的水动力学损失。所述弧形叶片通过致动器臂可旋转地连接到致动器,致动器臂从所述旋转致动器的圆柱体沿径向方向延伸,至少部分附接并定位在密封板的前方。如在下面的详细公开中进一步描述的,所述弧形叶片进一步配置有侧护罩,侧护罩与叶片模制为一个组件。使用标准工业紧固件(如螺栓)将叶片进一步连接(紧固)并固定到致动器臂,并且定位成在张力下被加载。本文公开的装置被设计为防止水溅射到weda的其他成部件和/或船舶的发动机中。旋转致动器还被配置为能够容易地水平安装和垂直部署弧形叶片。在船舶运行期间,旋转致动器被配置为在完全/部分部署状态和完全/部分缩回状态之间相对于支撑结构枢转移动水接合装置(弧形叶片),以抵消船舶运动中的任何意外干扰。
- 还没有人留言评论。精彩留言会获得点赞!