尾流自适应前置预旋导轮及控制方法与流程
本发明涉及船舶,尤其涉及尾流自适应前置预旋导轮及控制方法。
背景技术:
1、船舶的节能减排已经成为船舶科研院所、设计院和船厂的迫切需求,特别是在船舶水动力节能附体装置中,采用导轮主体形式的节能装置通常有一个导管,内部布置有导叶,导叶向外延伸至导管外侧。其中,导叶用于产生桨前水流预旋的作用,导管能够起到对船尾螺旋桨前方来流整流的作用。
2、目前,船舶上安装的预旋导轮内部的导叶一般是焊接固定在船体上的,角度固定,导叶不能对桨前水流的预旋作用进行调节。在船舶航行过程中,受到海况、装载状态、航速等因素的影响,螺旋桨工作的负荷变化很大,导致螺旋桨和主机的匹配性较差,从而使得主机的功率不能被充分利用。
3、因此,亟需尾流自适应前置预旋导轮及控制方法,以解决上述问题。
技术实现思路
1、根据本发明的一个方面,本发明提供尾流自适应前置预旋导轮,能够改变螺旋桨前水流的预旋方向和强度,有效提高船舶的推进效率,达到更好的节能效果。
2、为了解决现有技术存在的上述问题,本发明采用以下技术方案:
3、尾流自适应前置预旋导轮,包括:
4、驱动机构,所述驱动机构用于设置于船体尾部;
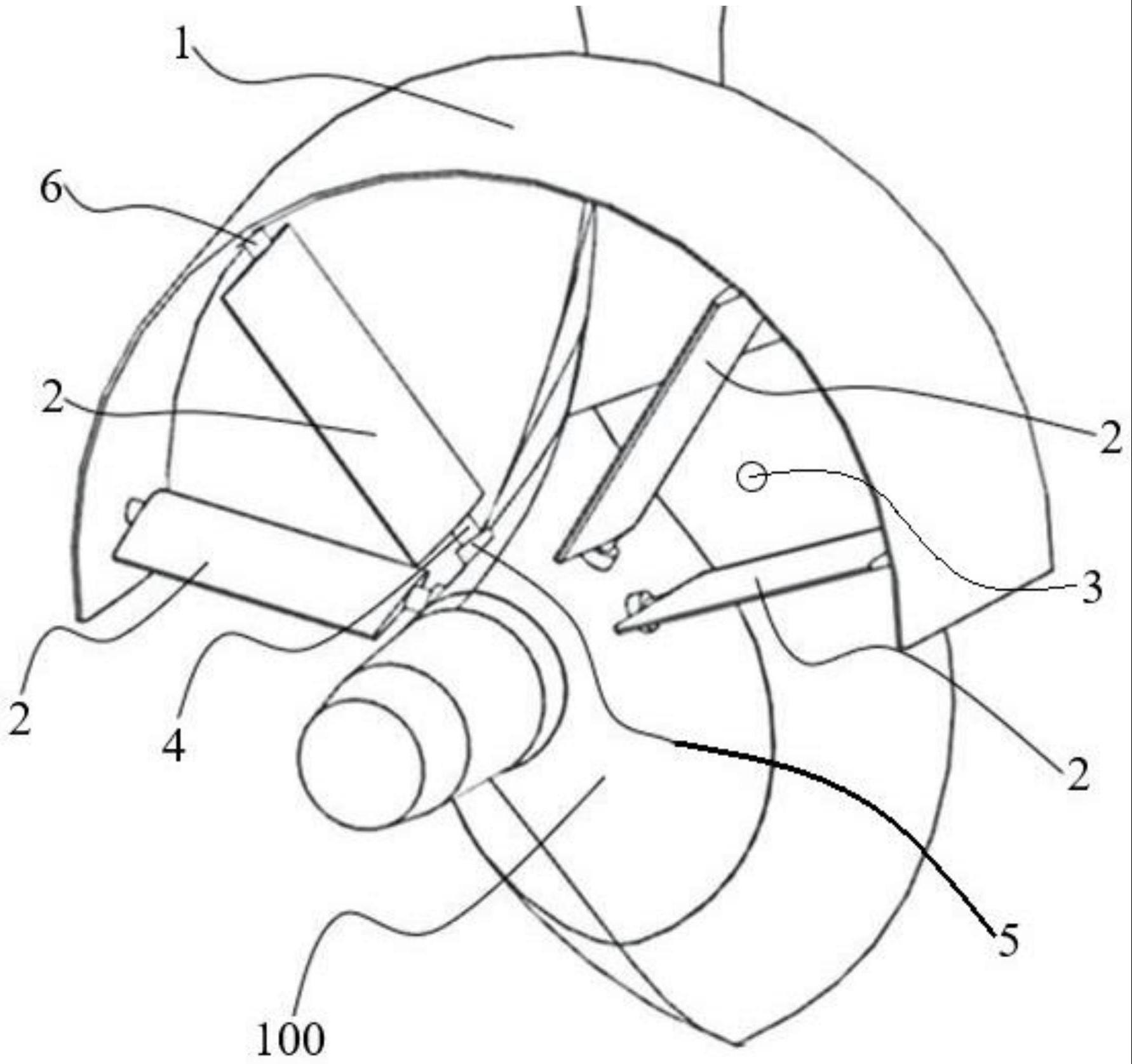
5、环形导管,所述环形导管呈弧状结构,所述环形导管与所述船体尾部的外周壁之间间隔设置有预旋水流通道,所述预旋水流通道用于水流的预旋和通过;
6、导叶,所述导叶位于所述预旋水流通道,所述导叶具有第一端部和第二端部,所述第一端部转动设置于所述环形导管,所述第二端部连接于所述驱动机构,所述驱动机构能够驱动所述导叶沿自身轴线转动,以使所述导叶能够改变所述预旋水流通道内水流的预旋方向和强度;
7、预旋传感器,所述预旋传感器设置于船体上,所述预旋传感器用于检测螺旋桨的工作负荷值。
8、优选地,所述导叶能够绕其轴线相对所述环形导管摆动设置,且所述导叶朝两侧的摆动角度均不超过50°。
9、优选地,所述导叶的数量设置有多个,多个所述导叶沿所述船体尾部的外周壁周向发散。
10、优选地,沿所述导叶的轴线至所述导叶两侧的方向,所述导叶的剖面为流线型机翼结构。
11、优选地,所述驱动机构包括第一旋转轴和旋转驱动源,所述旋转驱动源安装于所述船体尾部,所述第一旋转轴的一端连接于所述旋转驱动源,所述第一旋转轴的另一端连接于所述导叶。
12、优选地,所述船体尾部设置有安装槽,所述旋转驱动源内嵌于所述安装槽。
13、优选地,所述旋转驱动源采用电动或液压驱动。
14、优选地,所述尾流自适应前置预旋导轮还包括第二旋转轴,所述第二旋转轴的两端分别连接于所述环形导管和所述导叶。
15、优选地,所述环形导管设置为半圆环形或圆环形结构。
16、根据本发明的另一个方面,提供了尾流自适应前置预旋导轮控制方法,通过上述尾流自适应前置预旋导轮的实施,所述尾流自适应前置预旋导轮控制方法包括:
17、s100:所述预旋传感器获取螺旋桨的工作负荷值,并判断螺旋桨的工作负荷值的高低;
18、s200:所述驱动机构启动;
19、s300:确定所述导叶的偏转方向;
20、s400:当所述螺旋桨的工作负荷较高时,所述导叶与螺旋桨旋转方向相同的方向旋转,当所述螺旋桨的工作负荷较低时,所述导叶与螺旋桨旋转方向相反的方向旋转。
21、本发明的有益效果为:
22、本发明提供的尾流自适应前置预旋导轮,驱动机构用于设置于船体尾部,环形导管与船体尾部的外周壁之间间隔设置有预旋水流通道。导叶位于预旋水流通道,导叶具有第一端部和第二端部,第一端部转动设置于环形导管,第二端部连接于驱动机构,驱动机构能够驱动导叶沿自身轴线转动,预旋传感器用于检测螺旋桨的工作负荷值。导叶能够根据螺旋桨的工作负荷自动调节偏转方向,实时接收螺旋桨的工作负荷值,并判断螺旋桨的工作负荷偏大还是偏小。当预旋传感器检测到螺旋桨的工作负荷较高时,在驱动机构的作用下,导叶与螺旋桨旋转方向相同的方向旋转,当预旋传感器检测到螺旋桨的工作负荷较低时,导叶在驱动机构的作用下与螺旋桨旋转方向相反的方向旋转。导叶的安装角度自动发生偏转,使得导叶与船尾的水流呈不同的攻角,从而能够改变螺旋桨前水流的预旋方向和强度,进而能够调节不同海况、装载状态下螺旋桨的工作负荷,使得螺旋桨可充分利用船舶主机发出的功率,有效提高船舶的推进效率,进一步达到更好的节能效果。
23、本发明提供的尾流自适应前置预旋导轮控制方法,预旋传感器获取螺旋桨的工作负荷值,并判断螺旋桨的工作负荷值的高低,驱动机构启动,确定导叶的偏转方向,预旋传感器对驱动机构进行控制,当螺旋桨的工作负荷较高时,导叶与螺旋桨旋转方向相同的方向旋转,当螺旋桨的工作负荷较低时,导叶与螺旋桨旋转方向相反的方向旋转。导叶能够根据螺旋桨工作的负荷自动调节偏转方向,使得导叶与船尾的水流呈不同的攻角,从而能够改变螺旋桨前水流的预旋方向和强度,有效提高船舶的推进效率。
技术特征:
1.尾流自适应前置预旋导轮,其特征在于,包括:
2.根据权利要求1所述的尾流自适应前置预旋导轮,其特征在于,所述导叶(2)能够绕其轴线相对所述环形导管(1)摆动设置,且所述导叶(2)朝两侧的摆动角度均不超过50°。
3.根据权利要求1所述的尾流自适应前置预旋导轮,其特征在于,所述导叶(2)的数量设置有多个,多个所述导叶(2)沿所述船体尾部(100)的外周壁周向发散。
4.根据权利要求1所述的尾流自适应前置预旋导轮,其特征在于,沿所述导叶(2)的轴线至所述导叶(2)两侧的方向,所述导叶(2)的剖面为流线型机翼结构。
5.根据权利要求1所述的尾流自适应前置预旋导轮,其特征在于,所述驱动机构包括第一旋转轴(4)和旋转驱动源(5),所述旋转驱动源(5)安装于所述船体尾部(100),所述第一旋转轴(4)的一端连接于所述旋转驱动源(5),所述第一旋转轴(4)的另一端连接于所述导叶(2)。
6.根据权利要求5所述的尾流自适应前置预旋导轮,其特征在于,所述船体尾部(100)设置有安装槽,所述旋转驱动源(5)内嵌于所述安装槽。
7.根据权利要求5所述的尾流自适应前置预旋导轮,其特征在于,所述旋转驱动源(5)采用电动或液压驱动。
8.根据权利要求1所述的尾流自适应前置预旋导轮,其特征在于,所述尾流自适应前置预旋导轮还包括第二旋转轴(6),所述第二旋转轴(6)的两端分别连接于所述环形导管(1)和所述导叶(2)。
9.根据权利要求1所述的尾流自适应前置预旋导轮,其特征在于,所述环形导管(1)设置为半圆环形或圆环形结构。
10.一种尾流自适应前置预旋导轮控制方法,其特征在于,通过如权利要求1-9任一项所述的自适应前置预旋导轮的实施,所述自适应前置预旋导轮控制方法包括:
技术总结
本发明属于船舶技术领域,公开了尾流自适应前置预旋导轮及控制方法,该尾流自适应前置预旋导轮包括驱动机构、环形导管、导叶和预旋传感器,驱动机构用于设置于船体尾部,环形导管呈弧状结构,环形导管与船体尾部的外周壁之间间隔设置有预旋水流通道,导叶位于预旋水流通道,导叶的第一端部转动设置于环形导管,导叶的第二端部连接于驱动机构,驱动机构能够驱动导叶沿自身轴线转动,预旋传感器用于检测螺旋桨的工作负荷值,导叶能够根据螺旋桨的工作负荷自动调节偏转方向,使得导叶与船尾的水流呈不同的攻角,从而能够改变螺旋桨前水流的预旋方向和强度,使得螺旋桨可充分利用船舶主机发出的功率,有效提高船舶的推进效率,达到更好的节能效果。
技术研发人员:陈雷强,苗飞,黄振宇,黄树权,夏灏超,韩用波
受保护的技术使用者:中船重工(上海)节能技术发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!