一种具有风帆输入受限的无人帆船运动控制方法
本发明涉及无人帆船,具体而言,尤其涉及一种具有风帆输入受限的无人帆船运动控制方法。
背景技术:
1、海洋多圈层相互作用是当今海洋科学的研究热点,海洋观测技术中的天基观测技术无法收集原位数据,海基观测技术空间上自由度较低,水下观测技术观测范围有限且水面观测能力较弱。上述海洋观测技术无法满足海气界面长航时、大范围观测数据连续获取需求。无人帆船在海表气象要素和浅水水文信息获取等方面显示出了较大的潜力,可以为海洋立体综合观测、海洋环境安全保障提供观测技术方法与先进平台支持。因此无人帆船运动控制的研究具有长远的应用价值。
2、根据控制目标的不同,无人帆船的控制可以分成两类,即以实现船速最大化或特定船速为目标的船速控制和以实现帆船沿参考航向航行的航向控制,前者通过控制风帆的展帆角实现,后者通过控制舵角实现。帆船的速度控制是通过调整特定视风角、视风速下的最佳攻角使得帆船获得最大加速度的同时保证横倾角在安全范围内,即推力优化或者帆角优化问题。通过极坐标曲线图可以描述特定航向下船速最大理论值以及不可航行的区域。
3、国外在帆船速度优化方向取得了不错的进展,例如,通过极坐标曲线图和风帆的空气动力学特性控制帆角;采用“guaranteed set inwersion”算法计算精准帆船运动数学模型下的极值搜索曲线,作为前馈补偿器指导控制器;采用“爬山算法”对帆角进行在线优化,该算法让帆角在每个采样时间进行一个小的调整,并记录下一时刻的速度响应,二者符号的乘积即为帆角相对于前进速度的梯度方向;采用“极值搜索算法”对产生最优攻角进行实时搜索,并依据人工经验设计前馈补偿器。为了克服传统es算法存在的稳态抖振,提出一种基于模糊控制系统的风帆控制器,输入为帆船的横滚角,该算法可以避免帆船因为风帆的力矩过大导致倾覆。国内相关研究中,部分针对es算法进行改进,设计一种无稳态振荡扰动esc航速优化方案,从而抑制了抖振现象。上述研究成果大多数没有考虑帆船横倾约束的问题,或者将帆船横倾问题与控制器设计融合在一起,使得输入受限的解决方案不具有通用性。有一种事件触发自适应模糊控制方案,将横倾约束转化为帆的输入饱和。上述研究成果的基础上,本课题将针对基于离散模型的研究对象做进一步的研究。
4、无人帆船的航向控制总体上可以参考常规动力船舶的航向控制。在国外,有相关研究采用fls设计舵角的控制器,考虑了转舵速度的因素;设计帆船的pid航向保持控制器;依据帆船艏向的动力学模型,在假设未知动态固定不变的条件下,设计了舵角的反步控制律,并对未知动态进行在线估计;对马达驱动的“prindle-19”模型采用kalman观测器进行参数辨识,并设计线性二次高斯控制器。此外,关于无人帆船建模问题,有相关研究应用牛顿-欧拉方程,拉格朗日方程以及机翼理论建立4自由度帆船模型,并基于模型采用积分反步法设计了帆船航向保持控制器;通过“flatness”理论和反步法设计了精准模型下帆船中立平衡式航向保持控制器;将帆船的转艏动态简化为nomoto模型,并采用模型参考自适应的方法设计控制器,具有相对于pid和反步法更优越的鲁棒性。国内的研究团队中,有研究人员从设计帆船的神经网络自适应动态面航向保持控制器出发,采用nussbaum函数处理控制增益方向未知的问题,在这项研究基础上,其他研究人员人进一步引入辅助系统和s函数处理舵角的输入受限的问题。
5、已有研究成果中很大一部分关注无人帆船航向保持的控制,对于航向实时更新的路径跟随的控制研究仍然很少。此外,由于帆船的复杂非线性特性和强耦合的特性,在实际中很难得到帆船的精确模型数据,因此绝大多数基于模型的控制方法具有一定的局限性。所以,基于数据驱动的控制器设计方案在无人帆船上的应用,仍然值得关注和发掘。
技术实现思路
1、根据上述提出的技术问题,本发明提供一种具有风帆输入受限的无人帆船运动控制方法。本发明考虑到不合理的展帆角会对帆船施加较大的倾覆力矩,使得帆船的姿态发生较大的变化,这不仅会影响帆船动力性能,严重则还会存在船体倾覆的风险。因此针对离散系统构建帆船横倾约束模型,来解决风帆控制器输入受限的问题。同时,针对舵角控制将全格式无模型自适应控制技术,应用于无人帆船航行控制系统,以解决无人帆船模型未知、瞬态响应差的问题。
2、本发明采用的技术手段如下:
3、一种具有风帆输入受限的无人帆船运动控制方法,包括:
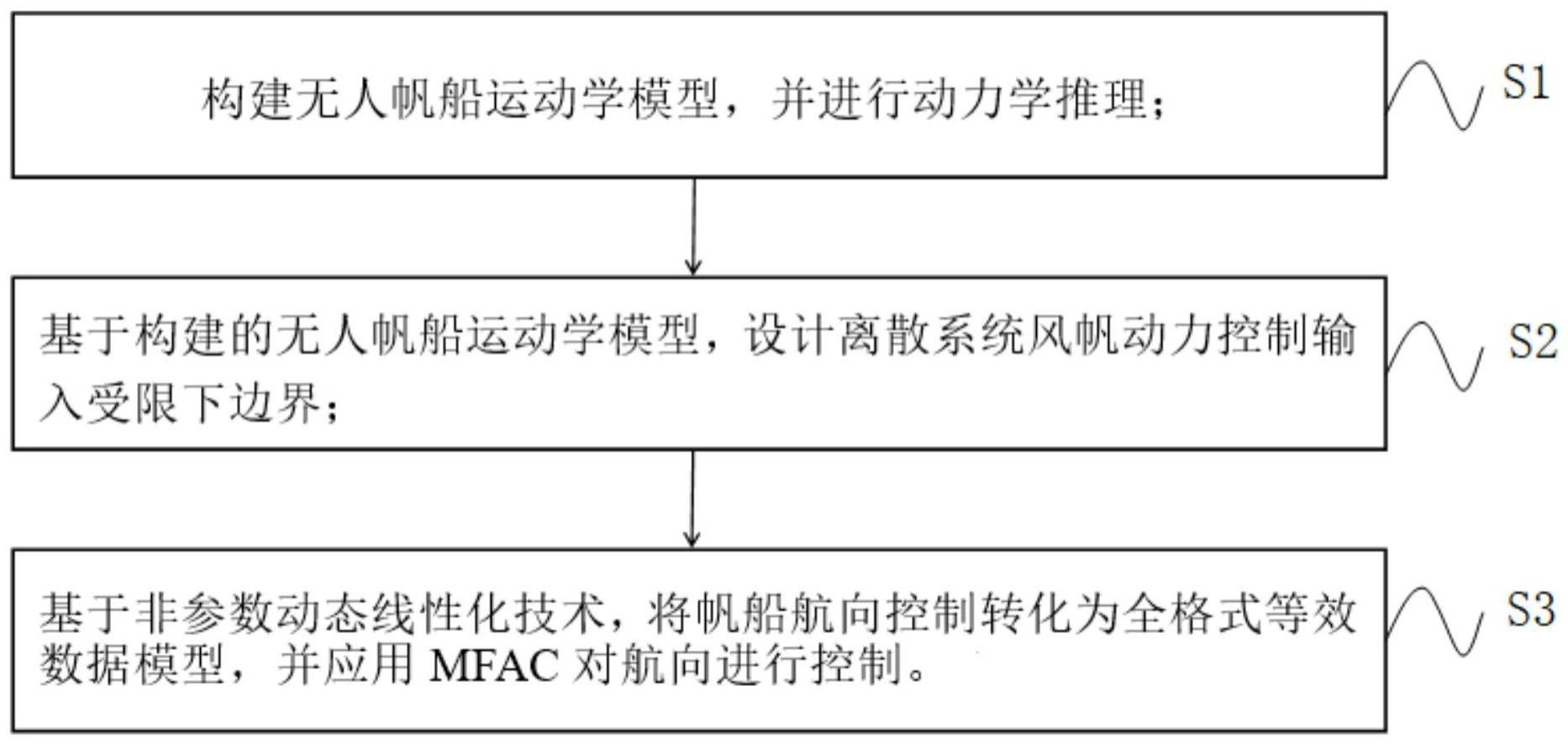
4、构建无人帆船运动学模型,并进行动力学推理;
5、基于构建的无人帆船运动学模型,设计离散系统风帆动力控制输入受限下边界;
6、基于非参数动态线性化技术,将帆船航向控制转化为全格式等效数据模型,并应用mfac对航向进行控制。
7、进一步地,所述构建无人帆船运动学模型,并进行动力学推理,包括:
8、构建无人帆船运动学、动力学模型,如下:
9、
10、
11、其中,η=[x,y,φ,ψ]t∈r4,[x,y]∈r2代表无人帆船在地球坐标系的位置,φ∈(-π/2,π/2]代表无人帆船的侧倾角,ψ∈(-π,π]代表无人帆船偏航角,ν=[u,v,p,r]t∈r4分别表示在船体坐标系下无人帆船的前向、横向速度、侧倾角速度和偏航角速度;mrb∈r4×4,ma∈r4×4,crb(ν)∈r4×4,ca(νr)∈r4×4,d(νr)∈r3×3分别是质量矩阵、科里奥利矩、刚体科里奥利矩阵、附加质量矩阵和阻尼矩阵;g(η)∈r4表示恢复力矩;s、k和r分别代表风帆、龙骨和舵的受力矩阵。
12、进一步地,所述基于构建的无人帆船运动学模型,设计离散系统风帆动力控制输入受限下边界,包括:
13、对构建的无人帆船运动学、动力学模型进行离散化,如下:
14、
15、
16、根据分离原理,认为fxs,k主导离散化公式中的前向运动,mxs,k主导横摇运动;
17、为了防止帆船倾覆,对φk+1的侧倾约束进行处理,预设阈值
18、由离散化公式可知φk+1是由pk决定的,通过反推法,将pk的阈值设计为:
19、
20、当时,
21、为了使得mxs,k的约束范围为被设计为设相关未知变量的观测值为则有:
22、
23、
24、设μ1=max[ξk],则得到:
25、pk+1>pk-tsμ1
26、
27、
28、
29、
30、上式中,随着εk→0,|ιφ,k|→0,即证明了通过限制横摇力矩mxs,k可以使得侧倾角收敛到阈值边界内;
31、根据mxs,k和fxs,k的动力学关系,当mxs,k被限制时,fxs,k也被限制;不考虑侧倾约束,|mxs,k|和fxs,k都将随着|αs|的增大而从0增加至最大值,但是它们的最大值所对应的|αs|不相关;定义αsu为|mxs,k|最大值对应的攻角,αsp为fxs,k最大值对应的攻角,定义mxs,k限制边界对应的|αs|阈值为αsl;
32、设置侧倾约束阈值为min{αsp,αsu,αsl}对应的fxs,k的值,即将侧倾约束转换为风帆的动力输入饱和。
33、进一步地,所述基于非参数动态线性化技术,将帆船航向控制转化为全格式等效数据模型,并应用mfac对航向进行控制,包括:
34、考虑一类未知的非仿射非线性离散单输入单输出(siso)非线性系统,如下:
35、y(k+1)∈rn=f(y(k),y(k-1),...,y(k-ny),u(k),u(k-1),...,u(k-nu))
36、对于无人帆船,主要是由改变舵角来实现对其航向的控制,即等效为上述系统,且满足上述假设,存在pdd,使得上述系统转化成下述ffdl数据模型:
37、
38、其中,
39、引入性能指标函数,如下:
40、j(δu(k))=|e(k+1)|2+ι|u(k)-u(k-1)|2
41、设置得到舵角的控制输入,如下:
42、
43、较现有技术相比,本发明具有以下优点:
44、1、本发明提供的具有风帆输入受限的无人帆船运动控制方法,其构建的帆船输入受限问题解决方案,运用数值控制技术,适用于实际的离散帆船控制系统,验证了帆角和侧倾角转换关系的实际可行性。
45、2、本发明提供的具有风帆输入受限的无人帆船运动控制方法,运用全格式无模型自适应控制技术,仅需要无人帆船的输入/输出数据就能实现控制效果,以使得摆脱对受控系统数学模型的依赖。
46、3、本发明提供的具有风帆输入受限的无人帆船运动控制方法,选用传统软帆和绳索配置的无人帆船进行建模,其控制机理和存在的机械延迟性更接近于实际情况,使得所设计控制算法具有更好的适应性。
47、基于上述理由本发明可在无人帆船等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!