水下清洗机器人的制作方法
本发明涉及水下设备清洗领域,具体涉及水下清洗机器人。
背景技术:
1、在我国海洋开发业发展的过程中,海洋钻井平台支架、海洋浮标、船舶以及潜水器等机械设备发挥了重要的作用。但是由于长期处于海水中会受到海水的腐蚀,并且附着大量的贝类、海藻等海洋生物,不仅会破坏机械设备使用的安全性,还会降低使用寿命。如果利用人工进行清洗,不仅工作效率低、成本高,而且还存在较高的风险。
2、目前通常采用水下清洗机器人对水下设备进行清洗,主要采用磁吸式水下清洗机器人针对复杂表面的清洗任务(例如船体艉部清洗、海上风电桩基础表面等)。在磁吸式水下清洗机器人爬壁时,其磁吸式履带轮一般搭载永磁体,清洗时吸附在物体上。但在清洗作业完成后,不需要吸附在物体上的时,磁吸式履带轮很难从物体上下来,完成吸附到浮游的状态转变,并且磁吸式履带轮的永磁体容易吸附杂质,对水下机器人行走造成影响。
技术实现思路
1、有鉴于此,本发明提供了一种水下清洗机器人,方便在清洗作业时,吸附在待清洗物体表面,且不影响水下清洗机器人的攀爬行走,在清洗作业完成后,方便从待清洗物体表面下来,完成吸附与浮游状态之间的转变,从而解决或者至少缓解了现有技术中存在的上述问题和其它方面的问题中的一个或多个。
2、为了实现前述目的,本发明提供了一种水下清洗机器人,其中,所述水下清洗机器人包括:
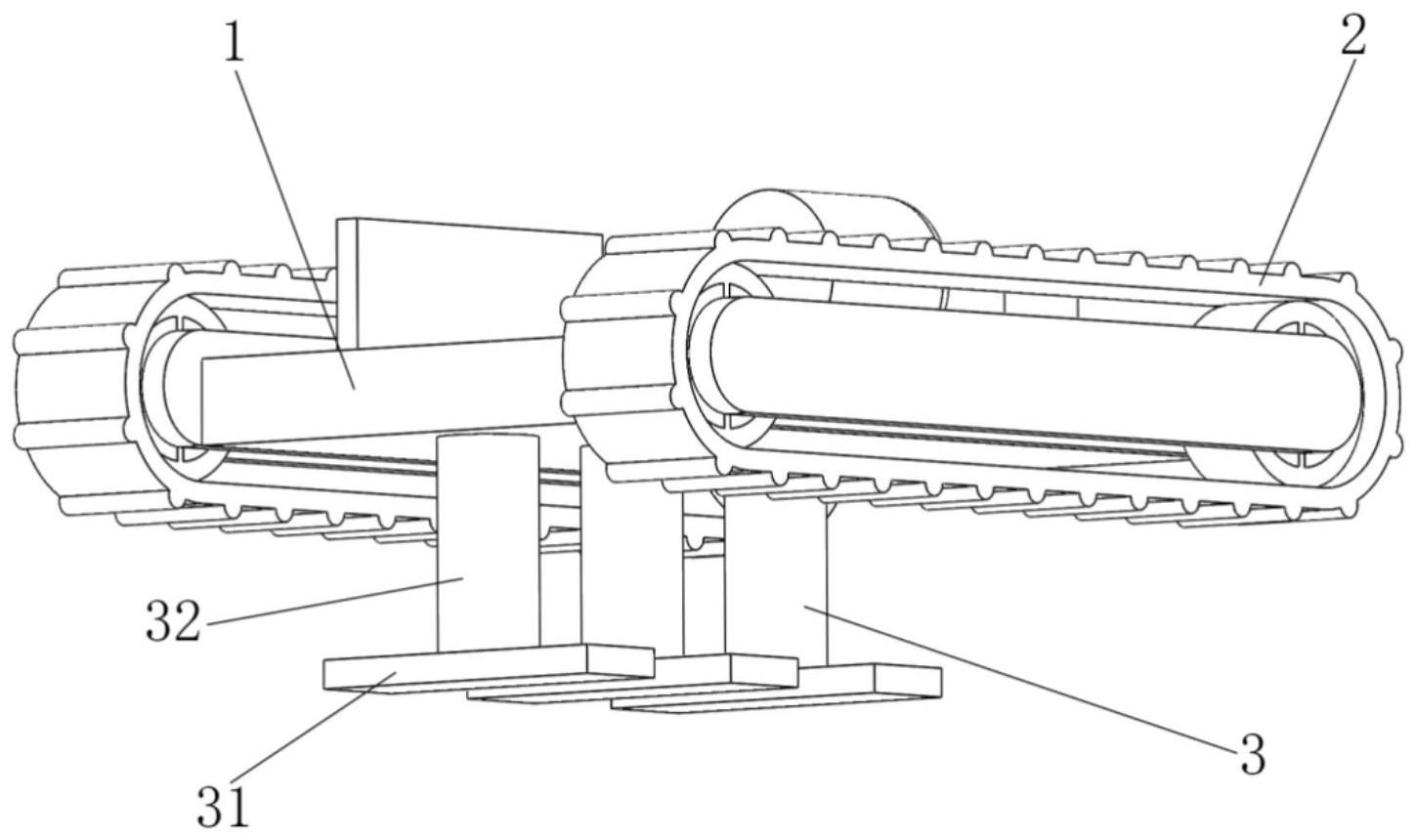
3、本体,所述本体具有底盘;
4、履带轮,所述履带轮对置设置在所述底盘的两侧,所述履带轮的下端超出所述底盘,所述履带轮能够带动所述清洗机器人在待清洗物体表面攀爬行走;
5、可伸缩磁吸装置,所述可伸缩磁吸装置包括磁体以及可伸缩部,所述可伸缩部的一端设在所述底盘的底面,所述可伸缩部的另一端连接所述磁体,并且所述可伸缩部能够带动所述磁体自所述底盘伸出和收缩,
6、其中,所述可伸缩磁吸装置具有第一位置和第二位置,在所述第一位置所述可伸缩磁吸装置完全收缩至所述底盘,
7、在所述第二位置所述述可伸缩磁吸装置伸出,并且所述磁体位置未超出所述履带轮的所述下端,所述履带轮能够贴在所述待清洗物体表面。
8、在如前所述的水下清洗机器人中,可选地,所述可伸缩磁吸装置还具有第三位置,在所述第三位置所述可伸缩磁吸装置完全伸出,并且所述磁体超出所述履带轮的所述下端,所述磁体能够直接磁吸在所述待清洗物体表面。
9、在如前所述的水下清洗机器人中,可选地,所述可伸缩磁吸装置设置在所述底盘的中间部位。
10、在如前所述的水下清洗机器人中,可选地,所述水下清洗机器人具有三个所述可伸缩磁吸装置,所述三个可伸缩磁吸装置均设置在所述底盘的横向的中间部位,并且所述三个可伸缩磁吸装置在所述底盘纵向均匀分布。
11、在如前所述的水下清洗机器人中,可选地,所述可伸缩部为可伸缩式油缸。
12、在如前所述的水下清洗机器人中,可选地,所述可伸缩部为剪叉机构,所述可伸缩部的所述第一端铰接在所述底盘。
13、在如前所述的水下清洗机器人中,可选地,所述可伸缩部的所述第二端固定连接所述磁体。
14、在如前所述的水下清洗机器人中,可选地,所述磁体为长方形板状结构,所述可伸缩部的另一端连接在所述长方形板状结构的中间部位。
15、在如前所述的水下清洗机器人中,可选地,所述磁体的横向面积大于等于所述可伸缩部的另一端的横截面积,所述磁体的纵向面积大于所述可伸缩部的另一端的横截面积。
16、在如前所述的水下清洗机器人中,可选地,所述磁体的所述长方形板状结构平行于所述水下清洗机器人的所述底盘。
17、本发明的水下清洗机器人采用底盘可伸缩磁吸装置,通过控制可伸缩磁吸装置的伸出或收缩至不同位置,方便水下清洗机器人完成吸附状态与浮游的状态之间的转变。在清洗过程中,在保持水下清洗机器人的吸附状态的同时保持履带轮贴合待清洗物体表面攀爬行走。
技术特征:
1.一种水下清洗机器人,其特征在于,所述水下清洗机器人包括:
2.如权利要求1所述的水下清洗机器人,其特征在于,所述可伸缩磁吸装置(3)还具有第三位置,在所述第三位置所述可伸缩磁吸装置(3)完全伸出,并且所述磁体(31)超出所述履带轮(2)的所述下端,所述磁体(31)能够直接磁吸在所述待清洗物体表面。
3.如权利要求1所述的水下清洗机器人,其特征在于,所述可伸缩磁吸装置(3)设置在所述底盘(1)的中间部位。
4.如权利要求1所述的水下清洗机器人,其特征在于,所述水下清洗机器人具有三个所述可伸缩磁吸装置(3),所述三个可伸缩磁吸装置(3)均设置在所述底盘(1)的横向的中间部位,并且所述三个可伸缩磁吸装置(3)在所述底盘(1)纵向均匀分布。
5.如权利要求1所述的水下清洗机器人,其特征在于,所述可伸缩部(32)为可伸缩式油缸。
6.如权利要求1所述的水下清洗机器人,其特征在于,所述可伸缩部(32)为剪叉机构,所述可伸缩部(32)的一端铰接在所述底盘(1)。
7.如权利要求1所述的水下清洗机器人,其特征在于,所述可伸缩部(32)的另一端固定连接所述磁体(31)。
8.如权利要求1所述的水下清洗机器人,其特征在于,所述磁体(31)为长方形板状结构,所述可伸缩部(32)的另一端连接在所述长方形板状结构的中间部位。
9.如权利要求8所述的水下清洗机器人,其特征在于,所述磁体(31)的横向面积大于等于所述可伸缩部(32)的另一端的横截面积,所述磁体(31)的纵向面积大于所述可伸缩部(32)的另一端的横截面积。
10.如权利要求8所述的水下清洗机器人,其特征在于,所述磁体(31)的所述长方形板状结构平行于所述水下清洗机器人的所述底盘(1)。
技术总结
本发明涉及一种水下清洗机器人。所述水下清洗机器人包括:本体,本体具有底盘;履带轮,履带轮对置设置在底盘的两侧,履带轮的下端超出底盘,履带轮能够带动清洗机器人在待清洗物体表面攀爬行走;可伸缩磁吸装置,可伸缩磁吸装置包括磁体以及可伸缩部,可伸缩部的一端设在底盘的底面另一端连接磁体,并且带动磁体自底盘伸出和收缩;可伸缩磁吸装置具有第一位置和第二位置,在第一位置可伸缩磁吸装置完全收缩至底盘,在第二位置可伸缩磁吸装置伸出,并且磁体位置未超出履带轮的下端,履带轮能够贴在待清洗物体表面。本发明的水下清洗机器人,能够方便地在浮游状态与吸附状态之间转换,并在清洁过程中保持吸附的同时,方便攀爬行走。
技术研发人员:朱胜强,郑东,庄德玉,刘聪,赵博渊,郑立波
受保护的技术使用者:中煤科工集团上海有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!