一种用于布放L型线列阵的大深度触底拖体的制作方法
:本发明属于水声探测,具体涉及一种用于布放l型线列阵的大深度触底拖体。
背景技术
0、
背景技术:
1、随着水声行业对深海可靠声路径探测技术的研究和试验,验证了深海声纳节点可放置在公海区深度极深的位置上,实现大范围海域内的潜艇探测的可行性,对潜艇的探测技术已初步进入立体观测阶段。但是迄今为止,没有形成装备能力。其中一个制约因素就是实现深海大深度立体观测阵布放的装备能力的不足。
2、垂直线列阵通过垂直阵潜/浮标的形式布放在预定海域,通过潜/浮标锚块、缆绳、浮体等部件可将水听器线列阵垂直的串联布放在预定深度的深水中,垂直线列阵本身呈零浮力,回收时释放器抛弃锚块,线列阵随着浮体自行上浮到海面实现回收。水平线列阵可通过试验船上的绞车拖曳系统直接进行拖曳,也可连接在专门的拖体尾部定深拖曳;还可以连接在潜艇/无人潜航器上进行拖曳,这几种拖曳方式可使线列阵在水中呈水平阵型。
3、将水平线列阵与垂直线列阵组合起来形成l型线列阵,允许多个空间立体节点协同工作,实现更大范围的潜艇探测和跟踪是亟待解决的技术问题,尤其是用于支撑l型线列阵深海布放的拖曳系统装备亟须研制,而实现这一目标的前提条件就是要求拖体可在不小于7000m的海底布放l型线列阵,以构建深海近底层仰视被动探测系统。
技术实现思路
0、
技术实现要素:
1、本发明所要解决的技术问题是,提供一种用于布放l型线列阵的大深度触底拖体,该大深度触底拖体在拖缆的牵引,可用在最深7000m的海底布放l型线列阵,并实现线列阵内传感器的供电以及信号的采集传输。
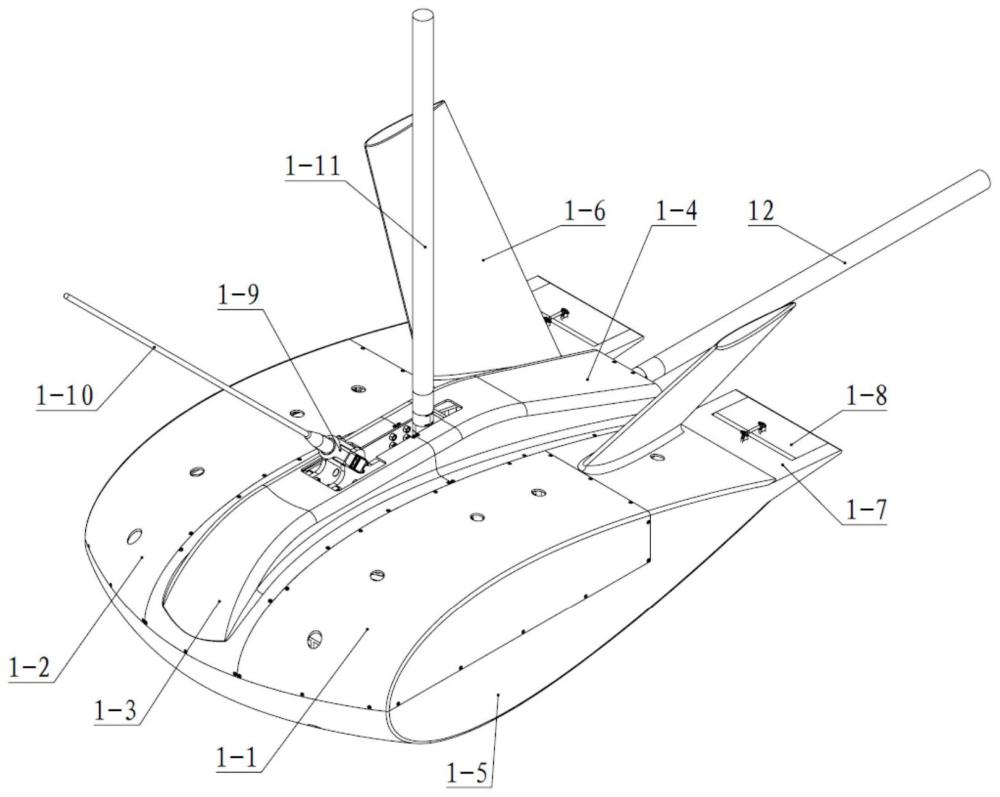
2、本发明的技术解决方案是,提供一种用于布放l型线列阵的大深度触底拖体,包括拖体外壳、斜尾翼、水平尾翼、支撑骨架、水平线列阵、垂直线列阵、拖缆、配重、电子舱、电池舱、航向和深度传感器舱;其中,
3、拖体外壳呈扁平水滴状,由前后错位的两种不同长度的标准翼型在拖体中纵剖面和左右舷剖面同时水平放样后形成整体线型,外表光顺连续,低阻力,具有水动力小漂角稳定性;
4、斜尾翼以标准翼型为基础进行倾斜放样,斜尾翼内部填充耐压浮力材料;
5、水平尾翼采用固定式水平尾翼结合调整翼进行布局,固定式水平尾翼和调整翼均为变厚度平板结构并在内部填充耐压浮力材料;可以通过旋转调整机翼上方的螺管,改变调整翼的迎流攻角。其中一部分为调整由于拖体机加工的不平衡性引起的拖体固定拖曳纵横倾,第二部分为可调整攻角来改变拖体拖曳状态下的整体横倾角;
6、支撑骨架为框架结构,支撑骨架外围和拖体外壳内侧线型共形,支撑骨架底部桁材上设有用于安装电子舱与电池舱的基座;
7、配重包括艏配重和舯配重,其中舯配重位于拖体底部拖点正下方,艏配重位于拖体艏部最前端,两配重均位固定在拖体支撑骨架上;通过配重合理布置,始终保持抬艏状态;
8、水平线列阵整体具有微重力,前端具有承力水密连接器,后端有重块模块;垂直线列阵整体具有微正浮力,下端具有水密承力连接器,上端安装浮力模块;其中,水平线列阵设置在拖体外壳尾部,垂直线列阵设置在拖体外壳上部;除了水听器,两条线列阵内还分布若干姿态及压力传感器;其中,水平线列阵和垂直线列阵中传感器的电信号信号传输入电子舱后转换为光信号,光信号通过拖缆中的光纤传递至水面,最终再通过光电转换模块变为可读的电信号;
9、电子舱、电池舱、航向和深度传感器舱通过互联电缆连接,其中电子舱通过水密连接器分别连接水平线列阵和垂直线列阵,电子舱通过光连接器连接拖头下端的光拖缆;电子舱还通过水密连接器分别连接电池舱和航向和深度传感器舱;
10、使用时,拖体在拖缆的牵引下首先在海水中低速拖曳,释放拖缆,根据回传的姿态及深度数据,在水平阵和拖体与海底接接触后,继续拖曳,直至水平线列阵水平拉直后停止,垂直线列阵在自身浮力作用下回复竖直状态,实现在海底布放l型线列阵。
11、拖体可由一根拖缆拖曳两条线列阵,并具备两种拖曳模式,第一种是不同深度中海水中拖曳,第二种是大深度触底拖曳;可实现在最深7000米的海底布放l型线列阵。第一种拖曳模式下拖缆牵引拖体在海水中低速拖曳,水平线列阵在自身重力和水动力作用下向拖体后下方倾斜,垂直线列阵在自身浮力与水动力作用下向拖体后上方倾斜,两条线列阵互不干涉。在第二种拖曳模式下,随着拖缆的逐渐释放,水平线列阵尾部先接触海底;当拖体内深度及姿态传感器回传的压力及姿态数据逐渐保持不变,表明拖体和水平线列阵完全接触海底;继续拖曳一段距离,分布在水平线列阵中若干姿态传感器回传的航向数据保持一致,表明水平线列阵在海底被拉成直线,停止拖曳;垂直线列阵在浮力作用下回复竖直状态。两条线列阵在海底构成l型阵列。
12、作为优选,拖体外壳外壳采取变厚度设计,前部、顶部及侧面厚度为6mm,底部厚度为10mm,并采用高强度玻璃纤维增强塑料真空成型。
13、作为优选,拖体外壳包括拖体左前壳、拖体右前壳、拖体中前壳、拖体中后壳和拖体下壳,其中,拖体左前壳、拖体右前壳、拖体中前壳、拖体中后壳可独立拆卸,便于内部设备安装。
14、作为优选,拖体外壳上方和下方开设有若干圆形通孔,用于布放回收时拖体内部的进水和排水,保持拖体空腔内外压平衡。
15、作为优选,拖体外壳以前后错位的两种不同长度的naca0030标准翼型在拖体中纵剖面和左右舷剖面同时水平放样后形成整体线型;斜尾翼以naca00012的标准翼型为基础进行倾斜放样,与水平面夹角小于45度,斜尾翼内部填充耐压浮力材料,这样既可避免拖曳状态下垂直阵后摆与尾翼碰撞,也为拖体横倾和纵倾同时提供恢复力矩。
16、作为优选,支撑骨架为钛合金板梁焊接及螺栓固定组合而成的框架结构,并分别在拖体横剖面,纵剖面和水平剖面的不同站位上设置若干共形加强筋,保证整体各个方向的结构强度。
17、作为优选,基座包括电池舱基座和电子舱基座,其中电池舱基座呈左右对称布置,电子舱基座设置在支撑骨底部后方,航向及深度传感器舱布置在拖体前部中纵剖面上;在拖体底部拖点正下方和拖体最前方分别布置舯配重和艏配重,降低体重心,保证拖体在触底拖时不倾覆。支撑骨架中间设置拖曳框,拖曳框通过螺栓固定在拖体外壳正上方,其中拖头接口高于拖体外壳,距离拖体长度三分之一处,拖曳框尾部拖点正后方设置垂直线列阵接口。基座采用螺栓连接在支撑骨架上,可以灵活拆卸更换,以便搭载配置其他设备。支撑骨架尾部还设置有水平线列阵接口,水平线列阵接口位于拖体外壳中纵剖面与水平对称面交叉处。优选用插销和挡片分别安装垂直阵和水平阵承力连接器安装在拖体上。
18、作为优选,电子舱、电池舱、航向和深度传感器舱均为钛合金圆柱主体结合两个半球舱盖而成的水密耐压舱,圆柱主体中间设置外环肋,半球舱盖端安装水密连接器。
19、进一步的,电子舱尾端盖的两个水密连接器分别连接水平阵和垂直阵;电子舱首端盖中间的光连接器连接拖头下端光拖缆;电子舱周向的三个水密连接器分别连接两个电池舱和航向和深度传感器舱。
20、与现有技术相比,本发明具有以下优点:
21、本发明拖体整体外形光顺连续,低阻力,具有水动力小漂角稳定性,在海水及触底拖曳时,始终保持抬艏状态。在拖缆的牵引,拖体可用在最深7000m的海底布放l型线列阵,并实现线列阵内传感器的供电以及信号的采集传输。
- 还没有人留言评论。精彩留言会获得点赞!