一种基于ROV海洋水文观测装置及方法与流程
本发明属于水下机器人,具体为一种基于rov海洋水文观测装置及方法。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
2、rov属于水下机器人的一种,目前用于水文观测的装置只能实现对固定点位进行观测,观测的范围有限,不能实现对同一水平面不同的单位进行观测,观测的范围有限。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种基于rov海洋水文观测装置及方法,有效的解决了上述背景技术中提到的的问题。
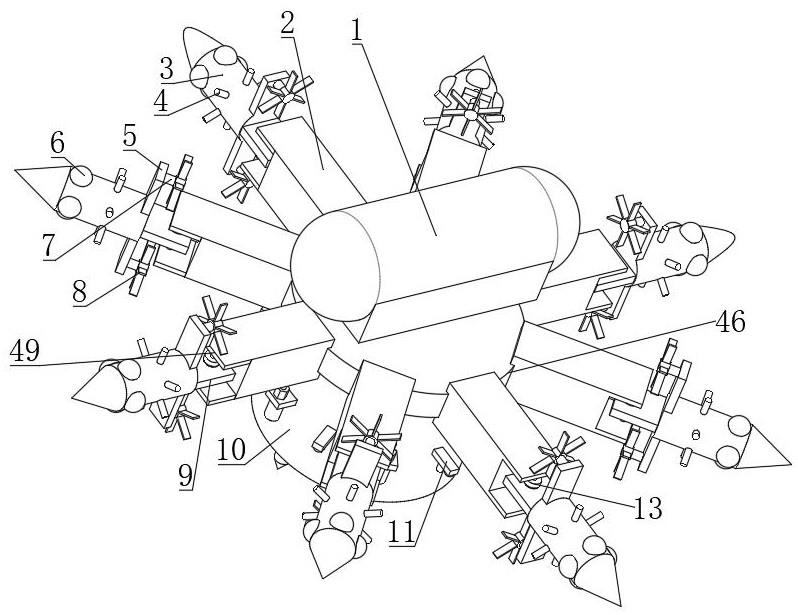
2、为实现上述目的,本发明提供如下技术方案:一种基于rov海洋水文观测装置,包括rov本体,所述rov本体与筒体之间转动机构连接,所述筒体上设有不同点位观测机构,所述不同点位观测机构包括筒体外表面转动连接的环形齿条板,所述筒体内设有驱动齿轮腔,所述驱动齿轮腔端壁间转动连接有驱动齿轮轴,所述驱动齿轮轴与观测电机动力连接,所述观测电机固定安装在所述rov本体内,所述驱动齿轮轴的外表面固定安装有驱动齿轮,所述驱动齿轮与所述环形齿条板之间啮合,所述环形齿条板的外表面固定安装有多个固定架,所述固定架之间距离相等,所述固定架内设有输送腔,所述输送腔端壁间对称转动连接有输送转轴,其中的一个所述输送转轴与电机动力连接,所述电机固定安装在所述固定架内,所述输送转轴的外表面缠绕连接有柔性绳,所述输送腔端壁上开设有通孔,所述柔性绳穿过所述通孔,所述柔性绳的末端固定连接有夹持板,所述夹持板外表面对称固定连接有固定板,所述固定板上转动连接有推动转轴,所述推动转轴与推动电机动力连接,所述推动转轴远离所述固定板一侧末端固定连接有螺旋桨,所述夹持板远离所述固定架一侧表面固定连接有锥形运动筒,所述锥形运动筒的外表面圆周阵列固定安装有水温监测仪,所述锥形运动筒的外表面圆周阵列固定安装有监测摄像头,所述监测摄像头与信号传输器信号连接,所述信号传输器固定安装在所述锥形运动筒内,所述水温监测仪与所述信号传输器信号连接,所述信号传输器与处理器信号连接,所述处理器固定安装在所述rov本体内。
3、优选的,所述筒体内设有取样机构,所述取样机构包括筒体内设有的取样腔,所述取样腔端壁上对称设有滑槽,所述滑槽端壁间转动连接有丝杆,所述丝杆与取样电机动力连接,所述取样电机固定安装在所述筒体内,所述丝杆外表面螺纹连接有螺母块,所述螺母块滑动连接在所述滑槽端壁间,所述螺母块之间固定连接有固定环,所述固定环内侧表面均匀固定连接有取样电动推杆,所述取样电动推杆远离所述固定环一侧末端固定连接有进水管,所述进水管上连接有输送管,所述筒体外表面固定连接有多个水泵固定板,所述水泵固定板的点个数与所述进水管一一对应,所述水泵固定板上表面固定连接有水泵,所述输送管远离所述进水管一侧末端与所述水泵的输出端固定连接,所述水泵固定板底壁上固定连接有抽取筒,所述抽取筒与所述水泵的输入端固定连接。
4、优选的,所述取样腔底壁上设有收集机构,所述收集机构包括所述取样腔底壁上固定连接有收集筒,所述收集筒内设有多个收集腔,所述收集腔有多层,每层所述收集腔有多个,所述收集腔端壁上设有进水通道,所述进水通道端壁间固定安装有单向阀,所述进水通道的直径大于所述进水管的直径。
5、优选的,所述转动机构包括所述rov本体内设有的转动腔,所述转动腔端壁间转动连接有齿轮轴,所述齿轮轴与转动电机动力连接,所述转动电机固定安装在所述rov本体内,所述齿轮轴的外表面固定安装有主动齿轮,所述主动齿轮与从动齿轮啮合,所述从动齿轮固定安装在转向轴的外表面, 所述转向轴转动连接在所述转动腔端壁间,所述转向轴延伸到所述转动腔外,所述转动腔下侧末端固定连接有所述筒体。
6、优选的,所述固定架上设有夹持机构,所述夹持机构包括所述固定架远离所述环形齿条板一侧末端对称固定连接有安装板,所述安装板内侧表面固定连接有夹持电动推杆,所述夹持电动推杆远离所述安装板一侧末端固定连接有夹板,所述夹板卡入到夹持槽中,所述夹持槽对称设在所述夹持板的外表面。
7、优选的,所述筒体的外表面固定安装有多个固定块,所述固定块之间的距离相等,所述固定块下表面固定安装有浮游动植物监测摄像头,所述固定块底壁上固定安装有含盐量监测仪,所述浮游动植物监测摄像头与所述处理器信号连接,所述含盐量监测仪与所述处理器信号连接。
8、优选的,所述筒体底壁上固定连接有eh监测探头,所述筒体底壁上固定连接有ph监测探头。
9、优选的,所述筒体底壁上固定连接有路径监测摄像头,所述路径监测摄像头与所述处理器信号连接。
10、本发明提供了一种基于rov海洋水文观测方法,基于上述所述的一种基于rov海洋水文观测装置,步骤包括:
11、步骤一:使得所述rov本体下潜,从而带动所述筒体下潜,便于实现不同深度的观测;
12、步骤二:在同一深度位置时,所述夹持机构运动,从而松开对所述夹持板,便于进行同一深度不同的点位进行观测;
13、步骤三:在同一深度位置时,所述不同点位观测机构运动,实现对同一深度的不同的点位的位置进行观测,观测的范围比较广泛;
14、步骤四:所述转动机构运动,从而带动所述筒体转动,从而实现对位置角度的调整,便于进行更好的观测与取样;
15、步骤五:所述取样机构运动,从而实现对水质进行取样,并且能够实现在观测时同时进行取样,而且可以实现对不同深度进行水质取样;
16、步骤六:取样后,所述收集机构运动,从而对取样的水质进行收集,并且可以实现对不同深度的水质进行收集;
17、步骤七:观测采集的数据经过所述处理器接收处理。
18、与现有技术相比,本发明的有益效果是:
19、1. 本发明提供了一种基于rov海洋水文观测装置,能够实现对同一层面不同的点位进行观测,观测的范围比较广,并且能够实现在同一层面上观测点位进行延伸,增加了观测的范围。
20、2.本发明提供了一种基于rov海洋水文观测装置,能够实现对水质进行取样,并且能够实现对多个点位进行取样,并且能够实现对多个点位的取样的水样进行不同的收集,便于进行研究,取样的效率比较高。
21、3.本发明提供了一种基于rov海洋水文观测装置,能够实现对沉积物的ph和eh进行观测,并且可以实现对水质中的含盐量进行监测。
技术特征:
1.一种基于rov海洋水文观测装置,其特征在于:包括rov本体(1),所述rov本体(1)与筒体(10)之间转动机构连接,所述筒体(10)上设有不同点位观测机构,所述不同点位观测机构包括筒体(10)外表面转动连接的环形齿条板(46),所述筒体(10)内设有驱动齿轮腔(34),所述驱动齿轮腔(34)端壁间转动连接有驱动齿轮轴(36),所述驱动齿轮轴(36)与观测电机动力连接,所述观测电机固定安装在所述rov本体(1)内,所述驱动齿轮轴(36)的外表面固定安装有驱动齿轮(35),所述驱动齿轮(35)与所述环形齿条板(46)之间啮合,所述环形齿条板(46)的外表面固定安装有多个固定架(2),所述固定架(2)之间距离相等,所述固定架(2)内设有输送腔(25),所述输送腔(25)端壁间对称转动连接有输送转轴(26),其中的一个所述输送转轴(26)与电机动力连接,所述电机固定安装在所述固定架(2)内,所述输送转轴(26)的外表面缠绕连接有柔性绳(23),所述输送腔(25)端壁上开设有通孔(24),所述柔性绳(23)穿过所述通孔(24),所述柔性绳(23)的末端固定连接有夹持板(9),所述夹持板(9)外表面对称固定连接有固定板(5),所述固定板(5)上转动连接有推动转轴(7),所述推动转轴(7)与推动电机动力连接,所述推动转轴(7)远离所述固定板(5)一侧末端固定连接有螺旋桨(8),所述夹持板(9)远离所述固定架(2)一侧表面固定连接有锥形运动筒(3),所述锥形运动筒(3)的外表面圆周阵列固定安装有水温监测仪(4),所述锥形运动筒(3)的外表面圆周阵列固定安装有监测摄像头(6),所述监测摄像头(6)与信号传输器信号连接,所述信号传输器固定安装在所述锥形运动筒(3)内,所述水温监测仪(4)与所述信号传输器信号连接,所述信号传输器与处理器信号连接,所述处理器固定安装在所述rov本体(1)内。
2.根据权利要求1所述的一种基于rov海洋水文观测装置,其特征在于:所述筒体(10)内设有取样机构,所述取样机构包括筒体(10)内设有的取样腔(47),所述取样腔(47)端壁上对称设有滑槽(37),所述滑槽(37)端壁间转动连接有丝杆(38),所述丝杆(38)与取样电机动力连接,所述取样电机固定安装在所述筒体(10)内,所述丝杆(38)外表面螺纹连接有螺母块(39),所述螺母块(39)滑动连接在所述滑槽(37)端壁间,所述螺母块(39)之间固定连接有固定环(43),所述固定环(43)内侧表面均匀固定连接有取样电动推杆(44),所述取样电动推杆(44)远离所述固定环(43)一侧末端固定连接有进水管(45),所述进水管(45)上连接有输送管(48),所述筒体(10)外表面固定连接有多个水泵固定板(15),所述水泵固定板(15)的点个数与所述进水管(45)一一对应,所述水泵固定板(15)上表面固定连接有水泵(17),所述输送管(48)远离所述进水管(45)一侧末端与所述水泵(17)的输出端固定连接,所述水泵固定板(15)底壁上固定连接有抽取筒(16),所述抽取筒(16)与所述水泵(17)的输入端固定连接。
3.根据权利要求2所述的一种基于rov海洋水文观测装置,其特征在于:所述取样腔(47)底壁上设有收集机构,所述收集机构包括所述取样腔(47)底壁上固定连接有收集筒(28),所述收集筒(28)内设有多个收集腔(40),所述收集腔(40)有多层,每层所述收集腔(40)有多个,所述收集腔(40)端壁上设有进水通道(41),所述进水通道(41)端壁间固定安装有单向阀(42),所述进水通道(41)的直径大于所述进水管(45)的直径。
4.根据权利要求1所述的一种基于rov海洋水文观测装置,其特征在于:所述转动机构包括所述rov本体(1)内设有的转动腔(29),所述转动腔(29)端壁间转动连接有齿轮轴(32),所述齿轮轴(32)与转动电机(31)动力连接,所述转动电机(31)固定安装在所述rov本体(1)内,所述齿轮轴(32)的外表面固定安装有主动齿轮(33),所述主动齿轮(33)与从动齿轮(30)啮合,所述从动齿轮(30)固定安装在转向轴(14)的外表面, 所述转向轴(14)转动连接在所述转动腔(29)端壁间,所述转向轴(14)延伸到所述转动腔(29)外,所述转动腔(29)下侧末端固定连接有所述筒体(10)。
5.根据权利要求1所述的一种基于rov海洋水文观测装置,其特征在于:所述固定架(2)上设有夹持机构,所述夹持机构包括所述固定架(2)远离所述环形齿条板(46)一侧末端对称固定连接有安装板(49),所述安装板(49)内侧表面固定连接有夹持电动推杆(27),所述夹持电动推杆(27)远离所述安装板(49)一侧末端固定连接有夹板(13),所述夹板(13)卡入到夹持槽(22)中,所述夹持槽(22)对称设在所述夹持板(9)的外表面。
6.根据权利要求4所述的一种基于rov海洋水文观测装置,其特征在于:所述筒体(10)的外表面固定安装有多个固定块(11),所述固定块(11)之间的距离相等,所述固定块(11)下表面固定安装有浮游动植物监测摄像头(19),所述固定块(11)底壁上固定安装有含盐量监测仪(20),所述浮游动植物监测摄像头(19)与所述处理器信号连接,所述含盐量监测仪(20)与所述处理器信号连接。
7.根据权利要求6所述的一种基于rov海洋水文观测装置,其特征在于:所述筒体(10)底壁上固定连接有eh监测探头(21),所述筒体(10)底壁上固定连接有ph监测探头(18)。
8.根据权利要求7所述的一种基于rov海洋水文观测装置,其特征在于:所述筒体(10)底壁上固定连接有路径监测摄像头(12),所述路径监测摄像头(12)与所述处理器信号连接。
9.一种基于rov海洋水文观测方法,基于上述权利要求1-8任一所述的一种基于rov海洋水文观测装置,其特征在于:步骤包括:
技术总结
本发明涉及水下机器人技术领域,且公开了一种基于ROV海洋水文观测装置及方法,包括ROV本体,所述ROV本体与筒体之间转动机构连接,所述筒体上设有不同点位观测机构,所述不同点位观测机构包括筒体外表面转动连接的环形齿条板,所述筒体内设有驱动齿轮腔,能够实现对同一层面不同的点位进行观测,观测的范围比较广,并且能够实现在同一层面上观测点位进行延伸,增加了观测的范围;能够实现对水质进行取样,并且能够实现对多个点位进行取样,并且能够实现对多个点位的取样的水样进行不同的收集,便于进行研究,取样的效率比较高;能够实现对沉积物的pH和eh进行观测,并且可以实现对水质中的含盐量进行监测。
技术研发人员:王恩康,赵晓龙,徐国强,徐文学,孙永根
受保护的技术使用者:自然资源部第一海洋研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!