船舶控制系统、船舶控制系统的控制方法、存储介质与流程
本发明涉及一种船舶控制系统、船舶控制系统的控制方法以及存储有船舶控制系统的控制程序的存储介质。
背景技术:
1、例如,在专利文献1中记载了一种具备搭载于船舶的推进器以及控制推进器的推进力的控制器的船舶的控制系统。该系统具有自动巡航指令装置、设定目标船速的装置、以及检测船舶的实际船速的装置,控制器控制推进器的推进力,以使目标船速与实际船速的差分在规定的速度范围内。在中断条件成立的情况下控制器以与通常时不同的推进力进行控制。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2017-094945号公报
技术实现思路
1、发明要解决的问题
2、在专利文献1中,提出了以下方案:对进行了转舵的情况进行探测、或者对船的偏航率进行探测,来使船速控制时的主机转矩增大。在此,主机负荷的变动会影响掉头速度,因此,在使用自动驾驶仪的情况下需要进行不需要的舵动作。另外,有可能在转弯时船速控制与舵角控制发生干扰而产生主机的不需要的负荷变动。主机的负荷变动会导致主机的燃料消耗量增加。
3、本发明是鉴于这样的问题而完成的,作为目的之一,提供一种能够减少转弯时的主机的不需要的负荷变动的船舶控制系统的技术。
4、用于解决问题的方案
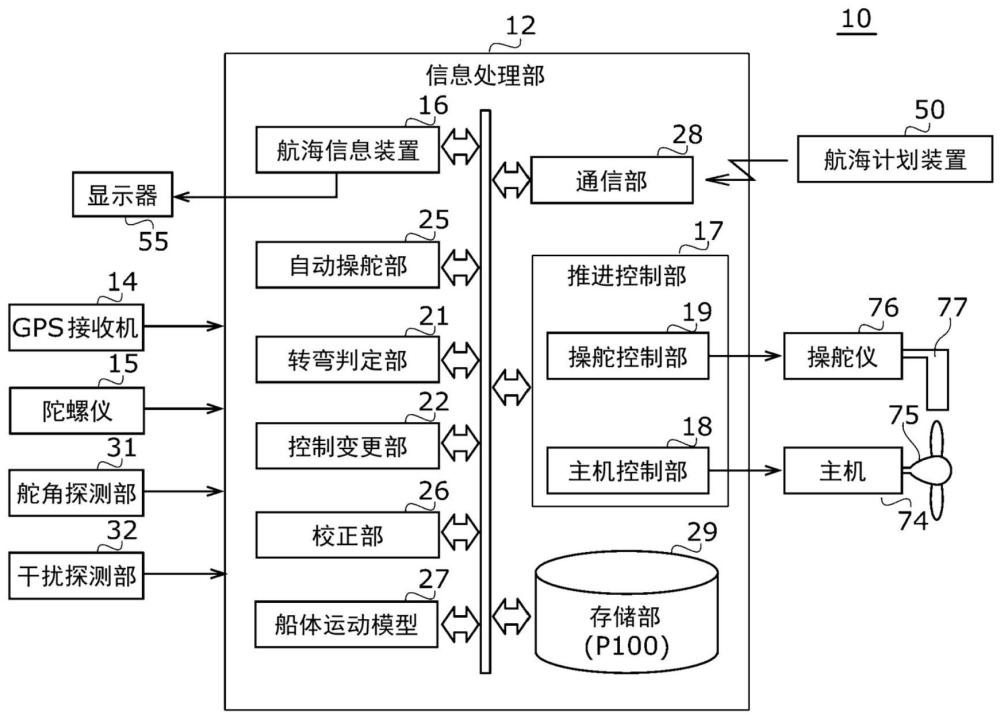
5、为了解决上述问题,本发明的某个方式的船舶控制系统具备:主机控制部,其在基于船舶的目标船速来控制主机的转速时,对船舶的实际船速进行反馈控制,来执行使实际船速接近目标船速的船速控制;转弯判定部,其判定船舶是否转弯;以及控制变更部,在由转弯判定部判定为船舶转弯的情况下,该控制变更部进行使船速控制的响应性降低的降低处理。
6、此外,以上的任意的组合、使本发明的构成要素或表现在方法、装置、程序、记录有程序的暂态或非暂态的存储介质、系统等之间相互置换得到的方式作为本发明的方式也是有效的。
7、发明的效果
8、根据本发明,能够提供一种能够减少转弯时的主机的不需要的负荷变动的船舶控制系统的技术。
技术特征:
1.一种船舶控制系统,具备:
2.根据权利要求1所述的船舶控制系统,其中,
3.根据权利要求1所述的船舶控制系统,其中,
4.根据权利要求1所述的船舶控制系统,其中,
5.根据权利要求4所述的船舶控制系统,其中,
6.根据权利要求4所述的船舶控制系统,其中,
7.根据权利要求1所述的船舶控制系统,其中,
8.根据权利要求1所述的船舶控制系统,其中,
9.根据权利要求1所述的船舶控制系统,其中,
10.一种船舶控制系统的控制方法,包括以下步骤:
11.一种计算机可读存储介质,存储有船舶控制系统的控制程序,所述船舶控制系统的控制程序使计算机执行以下步骤:
技术总结
本发明提供一种船舶控制系统、船舶控制系统的控制方法、存储介质。目的在于提供一种能够减少转弯时的主机的不需要的负荷变动的船舶控制系统的技术。某个方式的船舶控制系统(10)具备:主机控制部(18),其在基于船舶(1)的目标船速来控制主机(74)的转速时,对船舶的实际船速进行反馈控制,来执行使实际船速接近目标船速的船速控制;转弯判定部(21),其判定船舶1是否转弯;以及控制变更部(22),在由转弯判定部(21)判定为船舶1转弯的情况下,该控制变更部(22)进行使船速控制的响应性降低的降低处理。
技术研发人员:川谷圣,田中广树,榊原隆嗣,川崎直行,山口凉,植竹启延,岛田直毅,阿部健太
受保护的技术使用者:纳博特斯克有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!