一种适用于水下无人平台的应急气囊装置及其使用方法与流程
本发明属于水下无人装备应急保障设备领域,具体涉及一种适用于水下无人平台的应急气囊装置及其使用方法。
背景技术:
1、有人水下平台上设置有可弃压载,当其处于水下危险状态时,可通过抛弃可弃压载,减小平台负载,使其上浮,且根据可弃压载布置位置,还能起到调整平台水下姿态的作用。但每次抛弃可弃压载后,需重新挂载,会造成一定的使用成本。
2、水下无人平台由于减少了人的因素,不用配备相应的配套设施,吨位明显小于有人平台,且布置空间较为宽裕,使助浮气囊的应用有了可能。然而,现有的助浮气囊仅具备受控开启功能,当受控开启功能发生故障时,气囊无法展开,气囊开启触发机制冗余度设计不足,导致水下无人平台沉没。
技术实现思路
1、本发明的主要目的在于提供一种适用于水下无人平台的应急气囊装置及其使用方法,该装置及方法具有多冗余的触发机制,可有效防止水下无人平台沉没。
2、本发明所采用的技术方案是:
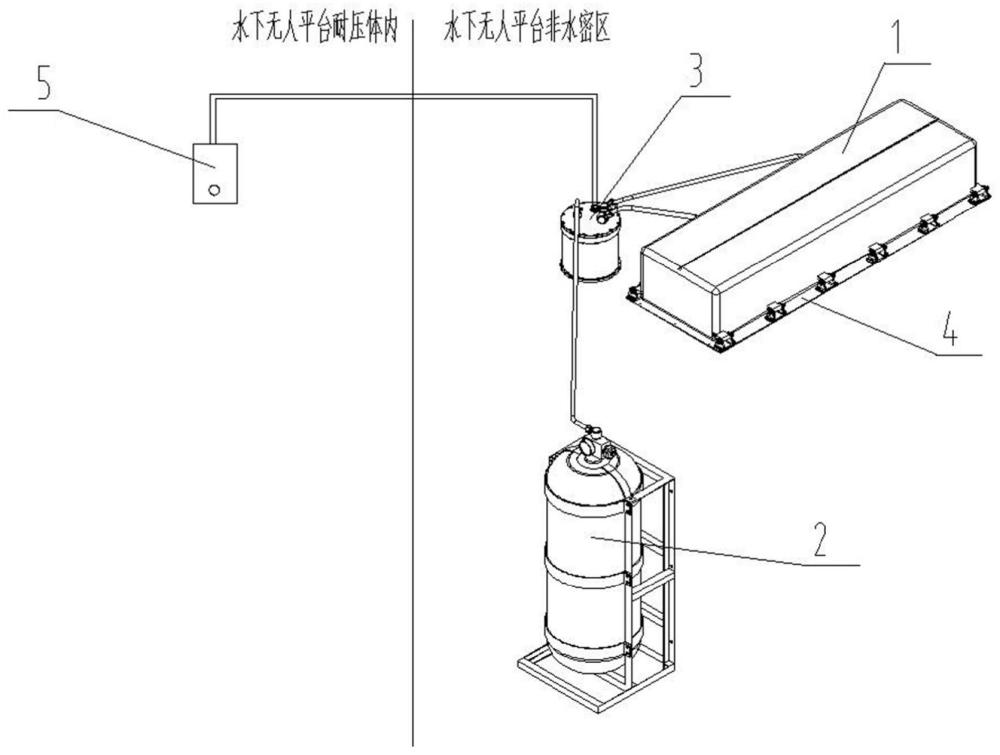
3、一种适用于水下无人平台的应急气囊装置,其包括气囊单元、气源单元、控制单元、中继接线盒;
4、所述气囊单元包括气囊,所述气囊安设在无人平台上;在气囊上安设有安全阀、充放气阀、进气阀;
5、所述气源单元包括安设在无人平台上的气瓶,所述气瓶内装有压缩空气,在气瓶上设有瓶头阀;
6、所述控制单元包括安设在无人平台上的控制主板、压力开关、压力变送器、液位传感器、电磁阀;压力变送器安设在气瓶的出气管上,压力变送器、液位传感器将采集的数据传递给控制主板;气瓶的出气管通过电磁阀与气囊的进气管连接,控制主板控制电磁阀工作;压力开关控制电磁阀工作;
7、所述控制单元通过中继接线盒与平台控制系统连接;
8、初始状态时,气瓶上的瓶头阀开启,压缩气体进入出气管内;控制单元的压力变送器测量出气管内气压值,反馈给控制主板,控制主板反馈气压状态及工作状态信号给平台控制系统;
9、执行受控启动:平台控制系统下达开启气囊指令,控制信号通过电缆传达至控制主板;控制主板控制电磁阀开启,同时反馈工作状态信号给平台控制系统;压缩空气通过出气管、进气管输送给气囊,气囊充气成形;当气囊内部压力与外部压力差到达安全阈值时,气囊内部的压缩空气通过安全阀排出;在供气过程中,当出气管内压力低于报警值时,控制主板反馈低气压信号给平台控制系统;
10、执行电子式自动启动:水下无人平台达到设定水深后,液位传感器测量所处水深,并将信息反馈控制主板;控制主板控制电磁阀开启,同时反馈工作状态信号给平台控制系统;压缩空气通过出气管、进气管输送给气囊,气囊充气成形;当气囊内部压力与外部压力差到达安全阈值时,气囊内部的压缩空气通过安全阀排出;在供气过程中,当出气管内压力低于报警值时,控制主板反馈低气压信号给平台控制系统;
11、执行机械式自动启动:水下无人平台到达设定水深后,压力开关独立开启电磁阀;控制主板检测到电磁阀开启后,将工作状态信号反馈给平台控制系统;压缩空气通过出气管、进气管输送给气囊,气囊组件充气成形;当气囊内部压力与外部压力差到达安全阈值时,气囊内部的压缩空气通过安全阀排出;在供气过程中,当出气管内压力低于报警值时,控制主板反馈低气压信号给平台控制系统。
12、按上述方案,所述气囊单元还包括保护套、封包;
13、所述保护套置于气囊外,采用锦丝绸、超高分子量聚乙烯布和锦丝带缝制而成;
14、所述封包包括阻燃牛津布,在阻燃牛津布上缝制锦纶粘扣带和安设搭扣;
15、通过设置保护套,可避免气囊在使用过程中被划伤或在充气、上浮过程中被涨破,提高了设备的可靠性;通过设置封包,方便气囊在不使用时进行收纳。
16、按上述方案,所述气囊单元通过固定组件安设在无人平台上;所述固定组件包括托板、基座;
17、气囊固定在托板上;基座将托板、无人平台连接在一起。
18、按上述方案,所述瓶头阀上集成有充气接口、截止阀、出气口、压力表、出气管。
19、按上述方案,所述控制单元还包括航插、屏蔽盒、密封舱;
20、所述航插与控制主板连接;
21、控制主板置于屏蔽盒内;
22、控制主板、电磁阀、屏蔽盒、液位传感器、压力开关置于密封舱内,进气管安设在密封舱上;压力变送器安设在气瓶的出气管与密封舱的接头处,且位于密封舱内侧。
23、按上述方案,中继接线盒上设有控制单元总线接口、常规电源及信号接口、备用电源接口及外置输入设备接口。
24、按上述方案,所述水下无人平台的应急气囊装置还包括外置输入设备,该外置输入设备与中继接线盒上的外置输入设备接口连接,能进行电子式自动启动水深设置及出气管低气压报警值设置。
25、按上述方案,所述电磁阀为直动式电磁阀。
26、按上述方案,所述气囊采用聚氨酯胶布制作而成。
27、按上述方案,所述气瓶通过水下无人平台上的框架固定。
28、本发明还提供一种适用于水下无人平台的应急气囊装置的使用方法,所述方法包括:
29、初始状态时,气瓶上的瓶头阀开启,压缩气体进入出气管内;控制单元的压力变送器测量出气管内气压值,反馈给控制主板,控制主板反馈气压状态及工作状态信号给平台控制系统;
30、执行受控启动:平台控制系统下达开启气囊指令,控制信号通过电缆传达至控制主板;控制主板控制电磁阀开启,同时反馈工作状态信号给平台控制系统;压缩空气通过出气管、进气管输送给气囊,气囊充气成形;当气囊内部压力与外部压力差到达安全阈值时,气囊内部的压缩空气通过安全阀排出;在供气过程中,当出气管内压力低于报警值时,控制主板反馈低气压信号给平台控制系统;
31、执行电子式自动启动:水下无人平台达到设定水深后,液位传感器测量所处水深,并将信息反馈控制主板;控制主板控制电磁阀开启,同时反馈工作状态信号给平台控制系统;压缩空气通过出气管、进气管输送给气囊,气囊充气成形;当气囊内部压力与外部压力差到达安全阈值时,气囊内部的压缩空气通过安全阀排出;在供气过程中,当出气管内压力低于报警值时,控制主板反馈低气压信号给平台控制系统;
32、执行机械式自动启动:水下无人平台到达设定水深后,压力开关独立开启电磁阀;控制主板检测到电磁阀开启后,将工作状态信号反馈给平台控制系统;压缩空气通过出气管、进气管输送给气囊,气囊组件充气成形;当气囊内部压力与外部压力差到达安全阈值时,气囊内部的压缩空气通过安全阀排出;在供气过程中,当出气管内压力低于报警值时,控制主板反馈低气压信号给平台控制系统。
33、本发明各部件的作用为:
34、气囊单元用于充气成形,提供正浮力。
35、气囊能充气展开,形成特定形体,为平台提供浮力。气囊主面料选用高强度、耐磨且厚度适中的聚氨酯胶布。
36、保护套保护气囊的囊体,避免被划伤,且同时提高气囊承压能力并传递浮力载荷。保护套采用锦丝绸、超高分子量聚乙烯布及锦丝带缝制而成。
37、安全阀保护气囊,避免气囊上浮过程中气囊内部压力过大而破裂。
38、充放气阀用于在气囊折叠时快速放气,同时充放气阀可以作为气密性检测接口。
39、进气阀与进气管路连接,实现单向进气功能。
40、封包固定约束折叠状态下的气囊。封包采用在阻燃牛津布上缝制锦纶粘扣带搭扣粘接的方式约束折叠气囊。
41、气源单元用于给气囊供气。
42、气瓶用于存储压缩空气。气瓶选用重量轻强度高的复合材料气瓶,尺寸根据气囊实际需求选取。
43、瓶头阀用于控制气瓶内气体有序进出,显示气瓶内气体压力。瓶头阀上集成有充气接口、截止阀、出气口、压力表、出气管。瓶头阀阀体选用硬铝,并经过电镀处理,能够满足防水、防腐蚀要求;截止阀、安全阀、压力表选用成熟的货架产品。
44、控制单元用于开启管路,为气囊充气,同时可向外部反馈设备工作状态、气瓶压力状态信息。控制单元有三种开启模式,一是接收控制信号,开启管路,为气囊充气;二是自身液位传感器检测到设备到达设定深度,开启管路,为气囊充气;三是自身压力开关检测到设备到达设定深度,开启管路,为气囊充气。
45、密封舱主要用于保护电磁阀、压力开关、液位传感器、压力变送器、屏蔽盒等零部件,避免零部件遭受水的侵蚀和破坏。密封仓采用重量轻、强度高的铝合金(6061)制作而成。
46、电磁阀主要用于根据控制主板指令控制气路通断。电磁阀选用潜水用直动式电磁阀。
47、航插主要用于连接控制单元与平台控制系统,并保持密封舱的密闭。航插选用具有防水功能的航插。
48、进气管有两根,用于连接气瓶、电磁阀、气囊,作为供气通道。进气管为高压软管。
49、控制主板用于根据外部开关量信号或自动检测的深度信号控制电磁阀的开启和关闭,进而控制气囊的成形,并反馈相关压力信号及工作状态信号。
50、液位传感器主要用于测量设备所处水下深度,为控制主板提供深度数据。
51、压力变送器主要用于测量气瓶压力,为控制主板提供气瓶压力数据。
52、屏蔽盒用于放置控制主板的电路板,避免电磁阀干扰控制主板正常工作。屏蔽盒采用质量轻的铝合金6061制作而成。
53、固定组件用于固定气囊单元。
54、托板用于固定气囊。托板选用经过电镀处理金属材料硬铝。
55、基座用于连接水下无人平台与托板。基座选用经过电镀处理金属材料硬铝。
56、中继接线盒安装于水下无人平台耐压体内,用于将水下无人平台常规电源、备用电源、外部输入输出信号及外置输入设备等模块进行电气连接,以实现控制器与外部的能源与信号交互。
57、所属外置输入设备用于调试及参试设置,可接入中继接线盒对控制主板的深度阈值和气瓶压力阈值进行设定。
58、本发明的有益效果在于:
59、本发明的气囊装置,具有受控启动、电子式自动启动及机械式自动启动三种启动方式,三种启动方式之间相互独立,互为冗余,可有效保障水下无人平台的安全,降低其沉没概率;
60、在气囊上设置有安全阀,可避免气囊在充气、上浮过程中被涨破,提高了设备的可靠性;
61、具备启闭信号、气瓶压力信号反馈功能,便于掌控设备实时状态;
62、电子式自动启动触发深度及气瓶报警压力可调节,可适应不同使用环境需求。
- 还没有人留言评论。精彩留言会获得点赞!