一种用于水下航行器尾迹流探测的仿生水母机器人
本发明属于水下航行器尾迹流探测,具体涉及一种用于水下航行器尾迹流探测的仿生水母机器人。
背景技术:
1、近年来,水下航行器监测技术发展的一个重要趋势是朝着无人、自主、高精度方向发展,尤其是随着多模感知传感器的迅猛发展,水下航行器监测设备受到了广泛关注。目前市面上的水下航行器监测设备大多以靶向式为主,通过对水下航行器尾迹流探测,以实现对水下航行器运动轨迹的监测。
2、然而,传统的水下航行器监测设备存在以下问题:1.监测设备体积较大,这给监测设备的运输和部署带来了一定的困难,增加了任务的复杂性和成本,且较大的体积易被水下航行器反监测。2.传统的水下航行器监测设备需要在固定位置进行监测,检测范围受限,无法实现全面监测。
3、综上,传统的靶向式水下航行器监测设备体积大,监测范围小。
技术实现思路
1、本发明的目的在于提出一种用于水下航行器尾迹流探测的仿生水母机器人,该机器人具有小型化、高隐蔽性及可动态监测的特点。
2、本发明为了实现上述目的,采用如下技术方案:
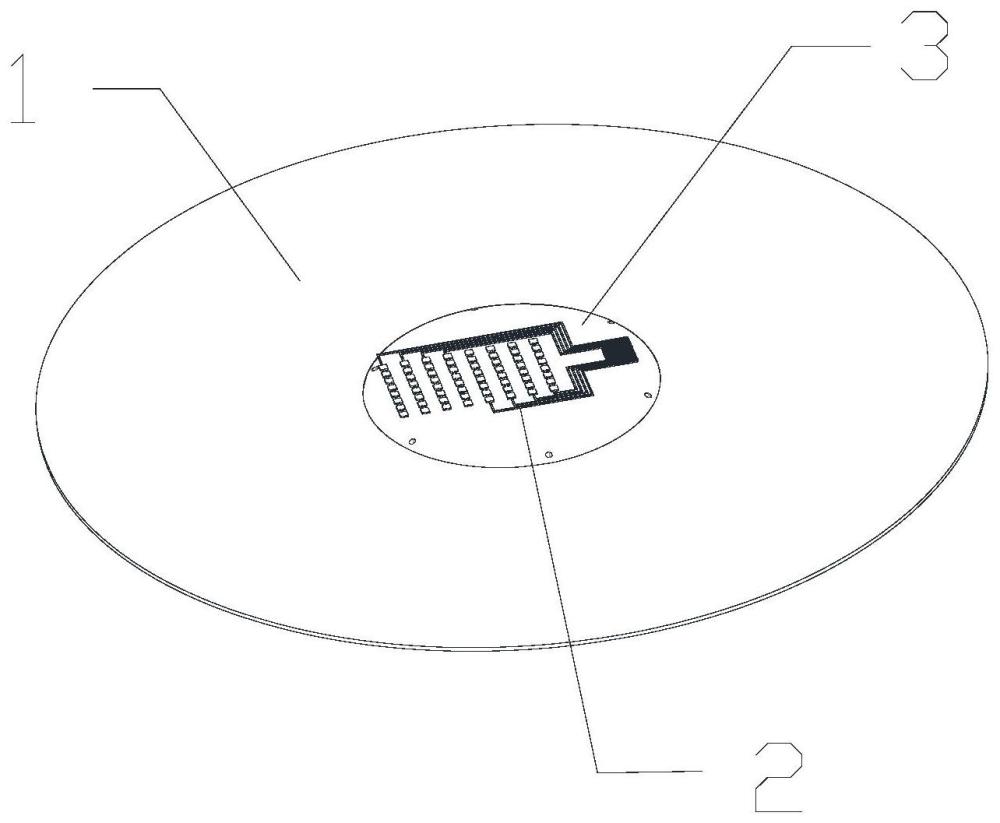
3、一种用于水下航行器尾迹流探测的仿生水母机器人,由软体水母机器人本体以及柔性压力传感器组成;
4、软体水母机器人本体包括控制仓、主控单元、伞状柔性层以及柔性驱动臂;控制仓设置于伞状柔性层的中心处,主控单元位于控制仓内;
5、主控单元包括主控芯片、数据存储芯片以及柔性驱动臂驱动单元;其中,数据存储芯片以及柔性驱动臂驱动单元分别与主控芯片相连;
6、柔性驱动臂有多组;各组柔性驱动臂均位于伞状柔性层的背侧,且与伞状柔性层连接为一体;柔性驱动臂通过导线连接至柔性驱动臂驱动单元上;
7、柔性压力传感器位于控制仓的正侧表面,且与所述主控芯片相连;其中,所述控制仓以及柔性压力传感器通过结构填充材料进行封装。
8、此外,本发明还提出了一种水下航行器尾迹流探测方法,其采用如上所述的用于水下航行器尾迹流探测的仿生水母机器人。具体探测步骤如下:
9、当水下航行器进行水下运动时,水下航行器尾部螺旋桨会产生具有一定规律的尾迹流,水下航行器在仿生水母机器人运动范围内时,柔性压力传感器实现将尾迹流产生的压力信号转换为柔性压力传感器的微小形变,从而引起柔性压力传感器的电阻变化,将压力信号转变为电信号,根据压力与柔性压力传感器电阻的线性关系,分析得出压力值,实现对水下航行器尾迹流的探测,从而实现对水下航行器运动轨迹的监测。
10、本发明的有益效果如下:
11、如上所述,本发明述及了一种用于水下航行器尾迹流探测的仿生水母机器人,该仿生水母机器人由软体水母机器人本体与柔性压力传感器组成,仿生水母机器人在一定的范围内进行固定轨迹运动,通过将柔性压力传感器覆盖仿生水母机器人的中心位置(即头部中心位置),当水下航行器进行水下运动时,其尾部螺旋桨会产生具有一定规律的尾迹流,水下航行器在仿生水母机器人运动范围内时,柔性压力传感器实现将尾迹流产生的压力信号转换为柔性传感器的微小形变,从而引起柔性传感器的电阻变化,将压力信号转变为电信号,根据压力与柔性传感器电阻的线性关系,分析得出压力值,实现对水下航行器尾迹流的探测,从而实现对水下航行器运动轨迹的监测。本发明可以实现高量程的压力范围和力电良好的线性度,且相比于传统的靶向式的监测设备,本发明具有小型化、高隐蔽性、动态监测等特点。
技术特征:
1.一种用于水下航行器尾迹流探测的仿生水母机器人,其特征在于,该仿生水母机器人由软体水母机器人本体以及柔性压力传感器组成;
2.根据权利要求1所述的仿生水母机器人,其特征在于,
3.根据权利要求1或2所述的仿生水母机器人,其特征在于,
4.根据权利要求1所述的仿生水母机器人,其特征在于,
5.根据权利要求4所述的仿生水母机器人,其特征在于,
6.根据权利要求1所述的仿生水母机器人,其特征在于,
7.根据权利要求1或6所述的仿生水母机器人,其特征在于,
8.根据权利要求1所述的仿生水母机器人,其特征在于,
9.根据权利要求1所述的仿生水母机器人,其特征在于,
10.一种水下航行器尾迹流探测方法,其特征在于,基于上述权利要求1至9任一项所述的仿生水母机器人实现;具体探测步骤如下:
技术总结
本发明属于水下航行器尾迹流探测技术领域,公开了一种用于水下航行器尾迹流探测的仿生水母机器人。该仿生水母机器人由软体水母机器人本体与柔性压力传感器组成。当水下航行器进行水下运动时,其尾部螺旋桨会产生尾迹流,水下航行器在仿生水母机器人运动范围内时,柔性压力传感器实现将尾迹流产生的压力信号转换为柔性传感器的微小形变,引起柔性传感器的电阻变化,将压力信号转变为电信号,根据压力与柔性传感器电阻的线性关系分析得出压力值,实现对水下航行器尾迹流的探测,从而实现对水下航行器运动轨迹的监测。本发明可以实现高量程的压力范围和力电良好的线性度,且相比于传统的监测设备,具有小型化、高隐蔽性、动态监测等特点。
技术研发人员:李俊漾,胡奇强,高立波,温琦,滕延越,李辽,王鑫
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!