基于印鱼仿生的海洋救援机器人
本技术涉及救援设备的,尤其是涉及一种基于印鱼仿生的海洋救援机器人。
背景技术:
1、在水下救捞领域,水下机器人开始发挥举足轻重的作用。水下机器人在保障潜水员不用下水的安全环境下,已经能完成大部分打捞救助辅助工作,如水下搜寻、视频观测、目标定位等。
2、现有水下机器人在使用时,虽然可以通过夹持结构将水下所需打捞物体进行夹持带出,但是现有水下机器人在实际的使用过程中还存在以下不足,如:现有水下机器人夹持结构由于设置在水下机器人底部,当夹持的物体需要带到水面船体上时,由于需要将水下机器人通过人力拉动至与船体内部上端面同一高度后才能拿取物体,进而大大增加了体力损耗,使用不方便。
技术实现思路
1、有鉴于此,本实用新型提供一种基于印鱼仿生的海洋救援机器人,其机身上设置有吸附装置,从而代替一般的夹持或机械臂的方式去营救。
2、本实用新型提供的一种基于印鱼仿生的海洋救援机器人采用如下的技术方案:
3、一种基于印鱼仿生的海洋救援机器人,包括
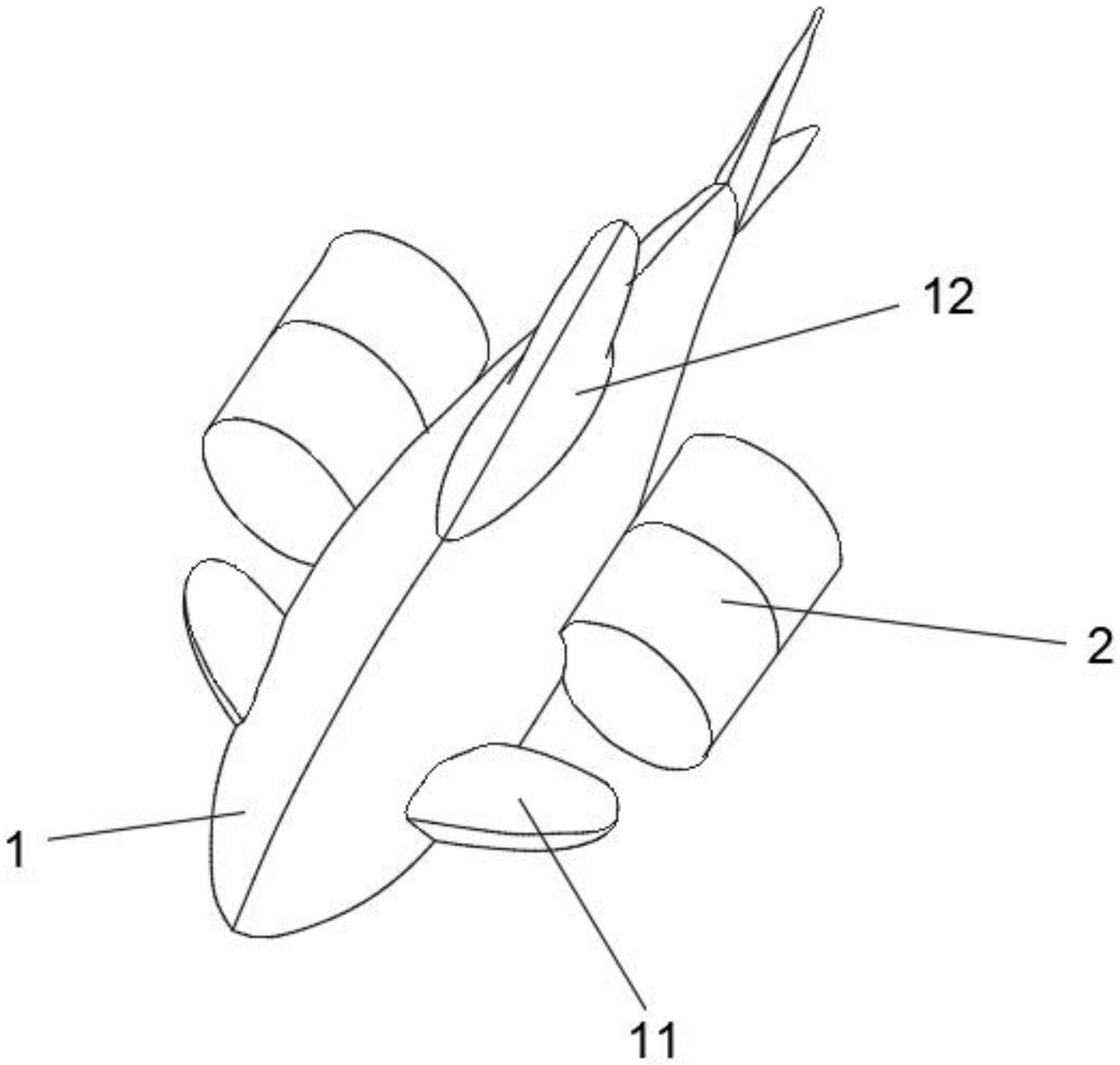
4、机身,作为承载平台;
5、驱动装置,设置于机身,所述驱动装置用于带动机身移动;
6、吸附装置,设置于机身,所述吸附装置具有吸附部,所述吸附部可被驱动的将机身吸附于船或与船分离。
7、可选的,所述吸附装置包括至少一个分布在机身的吸附单元,每个所述吸附单元包括密封空腔和驱动器,所述密封空腔设置于机身,所述密封空腔的体积可发生改变,所述驱动器用于驱使密封空腔的体积增大或缩小。
8、可选的,所述密封空腔沿其周向设置有密封圈,所述密封空腔位于密封圈内。
9、可选的,所述密封空腔采用弹性体材料制成,所述驱动器用于驱使弹性体发生弹性形变,从而改变密封空腔的体积。
10、可选的,所述密封圈沿其周向分布有多个碳纤维小刺,多个所述碳纤维小刺在密封圈的外围形成一层软唇圈。
11、可选的,还包括控制系统,所述控制系统包括中央处理器及其外围电路和无线传输模块,所述中央处理器与驱动装置和吸附装置电性连接,所述无线传输模块与终端设备通信连接。
12、可选的,还包括气囊装置,所述气囊装置包括设置于机身的气囊和气体发生器,所述气体发生器用于对气囊进行充气,所述气囊充气后从机身向外膨胀,所述气体发生器与控制系统电性连接。
13、可选的,所述机身上设置有用于密封气囊的气囊盖板,所述气囊向外膨胀时先将气囊盖板击破后再向机身外伸出。
14、可选的,所述机身的外形为仿鲨鱼结构。
15、可选的,所述驱动器采用偏动式sma弹簧驱动器。
16、综上所述,本实用新型包括以下至少一种有益技术效果:在机身上设置吸附装置,可以吸附在船上,通过船的快速移动将机器人快速移动到救援位置后,再将机器人从船上取下,驱使机器人到达救援位置进行救援,该吸附装置在水下具有高性能粘附能力,并能可重复的粘附在水下各种表面上,使用方便。
技术特征:
1.一种基于印鱼仿生的海洋救援机器人,其特征在于:包括:
2.根据权利要求1所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述吸附装置(3)包括至少一个分布在机身(1)的吸附单元,每个所述吸附单元包括密封空腔(31)和驱动器(32),所述密封空腔(31)设置于机身(1),所述密封空腔(31)的体积可发生改变,所述驱动器(32)用于驱使密封空腔(31)的体积增大或缩小。
3.根据权利要求2所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述密封空腔(31)沿其周向设置有密封圈(4),所述密封空腔(31)位于密封圈(4)内。
4.根据权利要求3所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述密封空腔(31)采用弹性体材料制成,所述驱动器(32)用于驱使弹性体发生弹性形变,从而改变密封空腔(31)的体积。
5.根据权利要求3所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述密封圈(4)沿其周向分布有多个碳纤维小刺(7),多个所述碳纤维小刺(7)在密封圈(4)的外围形成一层软唇圈。
6.根据权利要求1所述的基于印鱼仿生的海洋救援机器人,其特征在于:还包括控制系统,所述控制系统包括中央处理器及其外围电路和无线传输模块,所述中央处理器与驱动装置(2)和吸附装置(3)电性连接,所述无线传输模块与终端设备通信连接。
7.根据权利要求6所述的基于印鱼仿生的海洋救援机器人,其特征在于:还包括气囊装置(5),所述气囊装置(5)包括设置于机身(1)的气囊(51)和气体发生器(52),所述气体发生器(52)用于对气囊(51)进行充气,所述气囊(51)充气后从机身(1)向外膨胀,所述气体发生器(52)与控制系统电性连接。
8.根据权利要求7所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述机身(1)上设置有用于密封气囊(51)的气囊盖板(6),所述气囊(51)向外膨胀时先将气囊盖板(6)击破后再向机身(1)外伸出。
9.根据权利要求1所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述机身(1)的外形为仿鲨鱼结构。
10.根据权利要求2所述的基于印鱼仿生的海洋救援机器人,其特征在于:所述驱动器(32)采用偏动式sma弹簧驱动器(32)。
技术总结
本技术涉及一种基于印鱼仿生的海洋救援机器人,包括机身、驱动装置和吸附装置,机身作为承载平台,用于装载设备;驱动装置设置于机身,驱动装置用于带动机身移动;吸附装置设置于机身,吸附装置具有吸附部,吸附部可被驱动的将机身吸附于船或与船分离。在机身上设置吸附装置,可以吸附在船上,通过船的快速移动将机器人快速移动到救援位置后,再将机器人从船上取下,驱使机器人到达救援位置进行救援,该吸附装置在水下具有高性能粘附能力,并能可重复的粘附在水下各种表面上,使用方便。
技术研发人员:吴可,谢宛逸,刘纤纤,毛杨,吴梦瑶
受保护的技术使用者:重庆交通大学
技术研发日:20230412
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!