一种收集水上垃圾的机器人的制作方法
本技术涉及水环境治理设备,尤其涉及一种收集水上垃圾的机器人。
背景技术:
1、随着工业和社会的快速发展,我国水体污染问题日渐突出,在人们所涉足的海洋、湖泊、河流中,水面垃圾不但对水体生态造成严重威胁,破环生态景观,影响居民饮水,由于其往往大量聚集,难以清除,有时甚至会影响河道、水坝的正常运行,给居民的正常工作与生活带来困扰。
2、水上漂浮物,尤其以水草类居多,现多采用人工打捞对水草以及其他杂物进行处理,在炎热的夏季时,工人乘坐着船只在水面上打捞漂浮物时容易因为高温出现脱水中暑的情况。并且,人工打捞效率较低,且人工成本较大。
技术实现思路
1、本实用新型的目的在于提供一种收集水上垃圾的机器人,能自动打捞水面上漂浮物,提高打捞效率。
2、本实用新型公开的一种收集水上垃圾的机器人所采用的技术方案是:
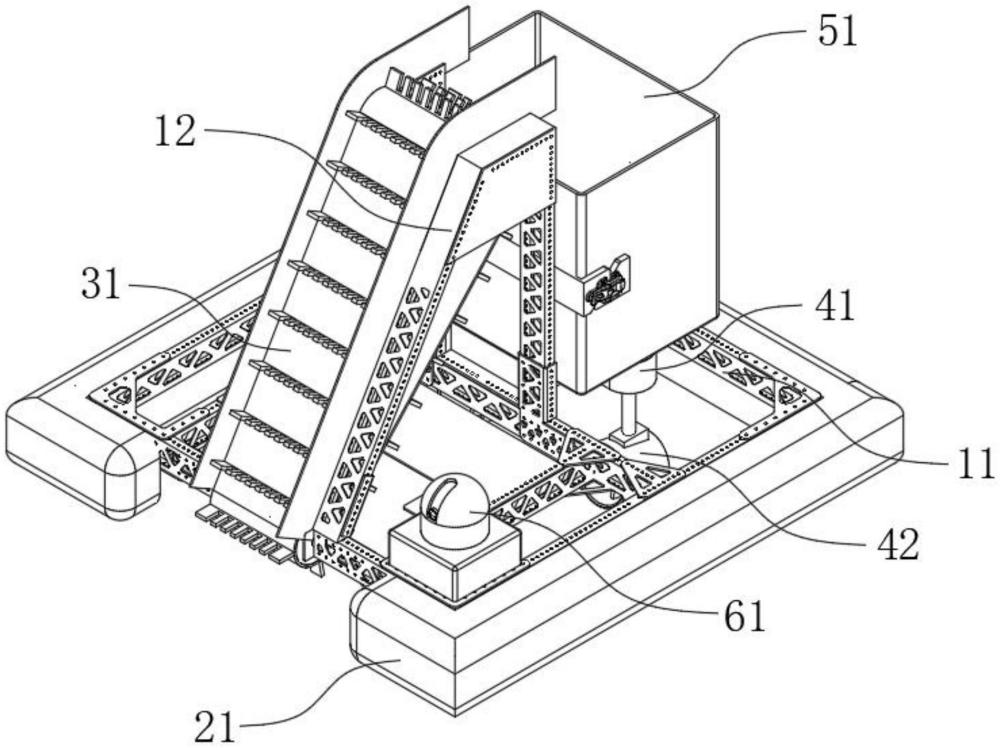
3、包括框架,所述框架外侧设有浮力装置,所述框架上设有支架,所述支架内设有收集机构,所述框架上设有视觉装置,所述框架内设有转向机构,所述转向机构上连接有推进装置,所述框架上设有收容箱,所述收容箱靠近支架,所述收集机构包括多个滚轮,多个所述滚轮与支架旋转连接,多个所述滚轮上套设有传输带,所述传输带固定连接有多个间隔排布的推板,其中两个所述滚轮分别靠近框架的一端和收容箱的开口处上方。
4、作为优选方案,所述推板上开设有多个间隔排布的缺口,所述收容箱的内壁壁面上开设有多个间隔排布的通槽,两个所述相邻的通槽之间形成刮刀,所述缺口从相邻刮刀的两侧经过。
5、作为优选方案,所述支架12为两个,两个所述支架互为对称排布,所述收集机构置于两个支架之间,所述滚轮的两端分别与两个支架旋转连接,所述支架上设有隔板,两片所述隔板分别靠近传输带两侧。
6、作为优选方案,其中一个所述支架上设有齿轮箱,所述齿轮箱内固定连接有第一驱动件,所述第一驱动件的输出轴贯穿齿轮箱与其中一个滚轮的一端固定连接。
7、作为优选方案,所述转向机构包括机箱和传动轴,所述机箱置于框架内,所述机箱内设有第二驱动件,所述传动轴与机箱的内壁旋转连接,所述第二驱动件的输出轴和传动轴的一端套设有皮带。
8、作为优选方案,所述推进装置为两个,所述推进装置上设有连接轴,所述连接轴的一端穿入机箱内,两个所述推进装置分别靠近机箱的两端,两根所述连接轴和传动轴的另一端均设有棘轮,三个所述棘轮外侧啮合有链条。
9、作为优选方案,所述支架外侧上设有限位座,所述限位座的两端延伸有连接部,所述收容箱置于机箱上,所述收容箱的两侧均设有连接座,所述收容箱卡入限位座内,所述连接座卡入连接部内固定。
10、作为优选方案,所述连接座和连接部上均开设有斜角,两个所述相邻的斜角滑动接触,所述连接座和连接部上均设有卡扣母座和卡扣公座,所述卡扣公座卡入相邻的卡扣母座内固定。
11、本实用新型公开的一种收集水上垃圾的机器人的有益效果是:
12、通过浮力装置为本设备提供漂浮的水面上的漂浮浮力,当视觉装置观察到水面上存在漂浮物时,通过转向机构控制推进装置的推力方向,控制本设备在水面上的行进方向,向漂浮物的方向靠近,在靠近漂浮物后,通过收集机构的滚轮带动传输带运行,使得传输带上的推板携带该漂浮物移动到收容箱的开口处上方,并将漂浮物放入收容箱内,从而实现本设备能自动化打捞水面上的漂浮物,提升打捞效率,并且解决在炎热的夏季需要工人打捞漂浮物时,因为高温让工人中暑的风险。
技术特征:
1.一种收集水上垃圾的机器人,其特征在于,包括框架,所述框架外侧设有浮力装置,所述框架上设有支架,所述支架内设有收集机构,所述框架上设有视觉装置,所述框架内设有转向机构,所述转向机构上连接有推进装置,所述框架上设有收容箱,所述收容箱靠近支架;
2.如权利要求1所述的一种收集水上垃圾的机器人,其特征在于,所述推板上开设有多个间隔排布的缺口,所述收容箱的内壁壁面上开设有多个间隔排布的通槽,两个所述相邻的通槽之间形成刮刀,所述缺口从相邻刮刀的两侧经过。
3.如权利要求2所述的一种收集水上垃圾的机器人,其特征在于,所述支架(12)为两个,两个所述支架互为对称排布,所述收集机构置于两个支架之间,所述滚轮的两端分别与两个支架旋转连接,所述支架上设有隔板,两片所述隔板分别靠近传输带两侧。
4.如权利要求3所述的一种收集水上垃圾的机器人,其特征在于,其中一个所述支架上设有齿轮箱,所述齿轮箱内固定连接有第一驱动件,所述第一驱动件的输出轴贯穿齿轮箱与其中一个滚轮的一端固定连接。
5.如权利要求1所述的一种收集水上垃圾的机器人,其特征在于,所述转向机构包括机箱和传动轴,所述机箱置于框架内,所述机箱内设有第二驱动件,所述传动轴与机箱的内壁旋转连接,所述第二驱动件的输出轴和传动轴的一端套设有皮带。
6.如权利要求5所述的一种收集水上垃圾的机器人,其特征在于,所述推进装置为两个,所述推进装置上设有连接轴,所述连接轴的一端穿入机箱内,两个所述推进装置分别靠近机箱的两端,两根所述连接轴和传动轴的另一端均设有棘轮,三个所述棘轮外侧啮合有链条。
7.如权利要求6所述的一种收集水上垃圾的机器人,其特征在于,所述支架外侧上设有限位座,所述限位座的两端延伸有连接部,所述收容箱置于机箱上,所述收容箱的两侧均设有连接座,所述收容箱卡入限位座内,所述连接座卡入连接部内固定。
8.如权利要求7所述的一种收集水上垃圾的机器人,其特征在于,所述连接座和连接部上均开设有斜角,两个所述相邻的斜角滑动接触,所述连接座和连接部上均设有卡扣母座和卡扣公座,所述卡扣公座卡入相邻的卡扣母座内固定。
技术总结
本技术公开了一种收集水上垃圾的机器人,包括框架,所述框架外侧设有浮力装置,所述框架上设有支架,所述支架内设有收集机构,所述框架上设有视觉装置,所述框架内设有转向机构,所述转向机构上连接有推进装置,所述框架上设有收容箱,所述收容箱靠近支架,所述收集机构包括多个滚轮,多个所述滚轮与支架旋转连接,多个所述滚轮上套设有传输带,所述传输带固定连接有多个间隔排布的推板,其中两个所述滚轮分别靠近框架的一端和收容箱的开口处上方。本技术提供一种收集水上垃圾的机器人,能自动打捞水面上漂浮物,提高打捞效率。
技术研发人员:岑海妍
受保护的技术使用者:岑海妍
技术研发日:20230721
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!