一种仿生推进器及多源驱动水下作业平台
本发明涉及水下机器人,具体为一种仿生推进器及多源驱动水下作业平台。
背景技术:
1、水下机器人是海洋开发平台及水下活动的重要载体,在海洋环境研究、海洋矿产勘探等民用、军用领域具有广阔的应用前景和巨大的潜在价值。传统的水下航行器多采用螺旋桨推进方式,螺旋桨推进器技术成熟,应用可靠,可以满足对于水下推进的诸多要求,但其在低速姿态调整工况下的工作效率低,稳定性差,且推进过程中会产生较大的噪声和明显的尾迹,扰动大,这些不足之处都大大限制了螺旋桨推进器的应用场景和技术进步。鱼类在水中有着优异的机动能力,可观的推进效率和出色的隐蔽性,因此现在着眼于新型推进方式的研究。
2、鱼类的推进模式根据推进器官的不同分为身体/尾鳍推进模式(body and/orcaudal fin, bcf)和中央鳍/对鳍推进模式(median and/or paired fin, mpf)两大类。bcf模式的鱼类约占鱼类总量的85%,mpf模式的约占15%。整体而言,bcf模式比mpf模式能够达到更高的游泳速度,mpf模式在机动性,稳定性等方面相较于bcf模式都有着巨大的优势。因此,mpf推进模式更适合在水下作业机器人上应用。
3、其中,仿生对鳍推进模式更适于在水下机器人上应用,通过模拟理想状态下对鳍的正弦波动驱动水下机器人行动,其中波动鳍通常采用柔软薄片状,且具有一定结构强度,现有技术中有可实现波动鳍收纳盒舒展的结构,可有效减小推进器的幅面大小,方便推进器上浮或下潜,但现有的波动鳍在收纳时,是呈工作状态下进行收纳的,往往需要足够厚的推进器壳体才能完成收纳,不利于实现结构小巧化。
4、此外,面对复杂多变的水下环境,单一推进方式往往难以满足使用需求。
技术实现思路
1、本发明公开了一种仿生推进器及多源驱动水下作业平台,它解决了现有技术中波动鳍收纳空间占用大、不利于实现推进器体积小巧的技术问题,具有结构合理、波动鳍收纳空间占用小、推进器体积小巧的技术优势,所采用的技术方案如下:
2、一种仿生推进器,包括机架、两仿生推进单元和驱动单元,两所述仿生推进单元在机架上轴向并列设置,所述仿生推进单元包括支杆、与支杆平行设置的驱动杆、若干摆动组件和波动鳍,若干所述摆动组件沿驱动杆的圆周方向等相位差布置,所述摆动组件包括摆杆、第一驱动臂和第一凸轮,所述第一驱动臂的第一端套设在支杆上,所述摆杆的第一端与第一驱动臂固接,所述摆杆的第二端夹持波动鳍,所述第一凸轮套设在驱动杆上且可与第一驱动臂的第二端抵接,所述仿生推进单元中若干所述第一凸轮沿驱动杆的圆周方向等相位差布置,所述第一凸轮上设有供驱动杆穿经的第一通孔,所述第一通孔的部分内壁面向外扩展形成扇形区域,所述驱动杆的相应位置处设有轴向延伸的凸块,所述驱动单元可将旋转运动分别传递至两驱动杆,当所述驱动单元驱使一仿生推进单元中驱动杆正向旋转时,所述凸块与扇形区域的第一侧壁抵接,驱使所述第一摆杆同步第上下往复摆动;当所述驱动单元驱使该驱动杆反向旋转时,所述凸块空转后与扇形区域的第二侧壁抵接,以补偿若干第一凸轮间的相位差,驱使若干第一摆杆向同一平面靠近。
3、在上述技术方案的基础之上,所述仿生推进单元还包括若干支撑板,所述支杆和驱动杆穿经若干支撑板,若干所述摆动组件沿仿生推进单元轴向均匀布置,所述摆动组件还包括第二驱动臂和第二凸轮,所述第二凸轮和第一凸轮结构相同且分设于支撑板两侧,所述第二驱动臂第一端套设在支杆上且与对应位置处的第一驱动臂固接,所述第二凸轮套设在驱动杆上且可与第二驱动臂第二端抵接,所述第二凸轮和第一凸轮共轭设置,以稳定地驱动摆杆上下往复摆动。
4、在上述技术方案的基础之上,第一驱动臂的第二端套设有第一套筒,第一套筒与第一凸轮外周面抵接,以保持第一凸轮的位置,所述第二驱动臂的第二端套设有第二套筒,第二套筒与第二凸轮的外周面抵接,以保持第二凸轮的位置。
5、在上述技术方案的基础之上,所述机架上设有轴向延伸的第一滑轨,所述第一滑轨上设有可沿第一滑轨滑移的第一滑块,所述仿生推进单元还包括支座、棘轮组件、控制杆和牵拉绳;
6、所述支座左右可滑移地设于机架上,所述支杆、驱动杆和驱动单元设于支座上;
7、所述棘轮组件包括内盘、制动爪、弹性件和外盘,所述内盘套设在驱动杆上且与驱动杆固接,所述外盘套设在内盘外且与内盘可转动地连接,所述制动爪的第一端嵌设于内盘外壁面且与内盘铰接,所述制动爪的第二端向外盘延伸,所述弹性件固设在内盘上且向上支撑制动爪第二端,所述外盘面向内盘的内环面设有若干可与制动爪咬合的固定爪,当所述驱动杆正向旋转时,所述制动爪第二端可摆动地划过固定爪,当所述驱动杆反向旋转时,所述制动爪与固定爪咬合,以驱使外盘同步旋转;
8、所述控制杆的一端与支座铰接,所述控制杆的另一端与第一滑块铰接;
9、所述牵拉绳的一端包绕于外盘外壁面,所述牵拉绳的另一端与第一滑块连接,当所述外盘与驱动杆反向旋转时,可驱使第一滑块沿第一滑轨轴向滑移,两仿生推进单元。
10、在上述技术方案的基础之上,一所述仿生推进单元中棘轮组件的外盘包括若干周向布置的固定爪,另一所述仿生推进单元中棘轮组件的外盘至少包括一固定爪。
11、在上述技术方案的基础之上,两所述仿生推进单元呈中心对称地布置,且所述外盘和滑轮的外缘面设有容置牵引绳的凹槽;所述机架上还转动连接有两滑轮,两所述滑轮分别靠近两棘轮组件设置,且所述滑轮被设计为,引导所述牵引绳以与第一滑轨平行的状态驱动第一滑块沿第一滑轨滑移。
12、在上述技术方案的基础之上,所述机架上并列设置有两开口朝下的u形件,且两所述u形件间形成轴向延伸的第一滑轨,两所述u形件顶面通过两挡块连接,两所述挡块靠近第一滑轨的两端设置,且所述挡块、两u形件、u形件端部的连板共同围合形成容置第一滑块的容置腔,所述第一滑块包括底板和相对设置的两立板,两所述立板的外缘面平滑过渡,且所述立板通过弹簧上下可活动地与底板连接,两所述立板间铰接有卡块,两所述仿生推进单元的牵拉绳分别与卡块的两端连接。
13、在上述技术方案的基础之上,所述机架上还开设有与第一滑轨位置对应的长孔,当所述立板向上与挡块抵触并向下位移时,所述长孔可容置立板。
14、在上述技术方案的基础之上,还包括分设于第一滑轨两侧的两第二滑块,所述第一滑轨两侧的机架上设有对称的两第二滑轨,所述第二滑块穿经控制杆上的长孔和第二滑轨,以提高控制杆运行稳定性。
15、在上述技术方案的基础之上,所述机架上固设有滑杆,所述滑杆穿经支座且与支座滑动连接,所述机架外罩设有壳体,且所述壳体上设有供波动鳍伸出收缩的长槽。
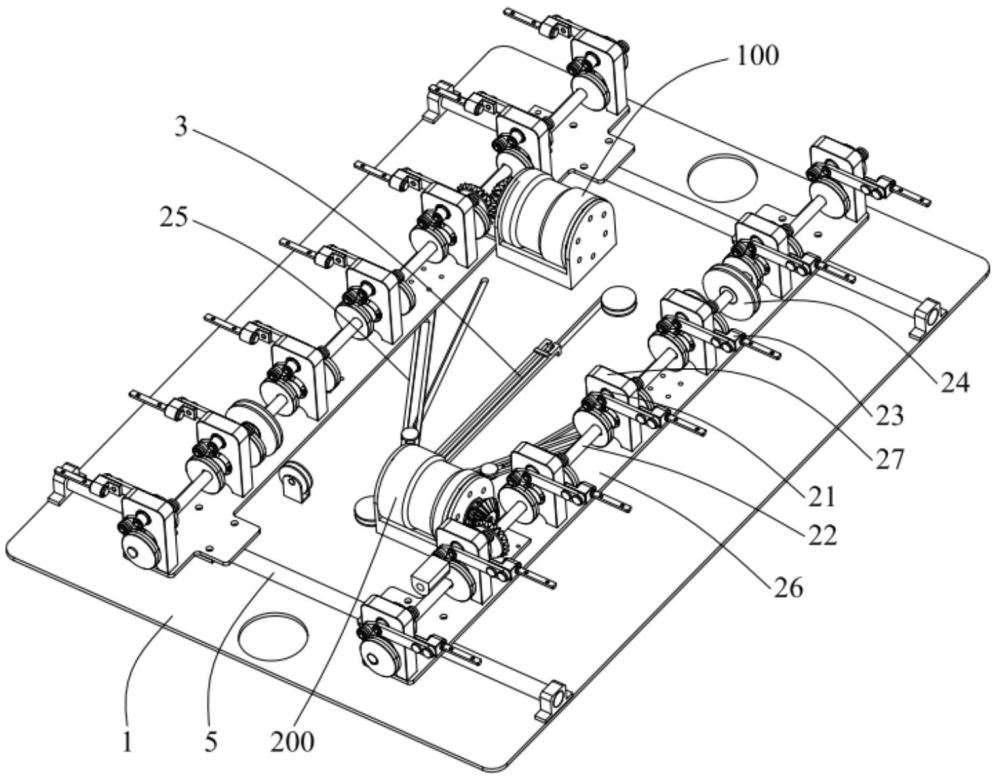
16、一种多源驱动水下作业平台,包括如上所述的推进器、第一螺旋桨推进单元和第二螺旋桨推进单元;
17、所述第一螺旋桨推进单元有多个且在机架上均匀布置,所述第一螺旋桨推进单元轴线与驱动杆轴线垂直,以驱使作业平台上浮或下潜;
18、所述第二螺旋桨推进单元有多个且在机架上均匀布置,所述第二螺旋桨推进单元轴线平行于驱动杆,以驱使作业平台前后行进或转向。
19、有益效果
20、本发明结构合理,两仿生推进单元并列设置,通过凸轮和驱动臂配合的方式驱动摆杆上下摆动,其中,凸轮上供驱动杆穿经的通孔包括扇形区域,可补偿若干凸轮间的相位差,当驱动杆驱使凸轮反向旋转时,对应的若干摆杆向同一平面靠近,如此可有效减小波动鳍的收纳空间,实现推进器小巧化。
21、本发明结构简单,通过对凸轮轮廓曲线的细致设置精准控制摆杆运动行程,此外大大提升了摆杆理想正弦波摆动的可提升空间,有利于实现柔性板正弦波动,有效提高仿生效果,相较于现有技术中的螺旋桨的驱动方式,可大大减小扰动,有利于适用多种作业要求。此外还包括共轭设置的两凸轮,两凸轮分设于支撑板的两侧,与两凸轮配合的两驱动臂可分设在支杆两侧,不仅可限位两凸轮的转动,而且稳定性好,避免支杆带动摆杆径向跳动。
22、本发明设计巧妙,驱动杆上还套设有棘轮组件,棘轮组件包括内盘、制动爪、弹性件和外盘,当驱动杆驱动内盘正向旋转时,外盘静止,当驱动杆驱动内盘反向旋转时,外盘随动,并驱使第一滑块在第一滑轨内滑移,以收纳或舒展两两仿生推进单元,可方便地实现工作和非工作状态切换,同时,可将两波动鳍从正弦状态收纳至薄片状态,结构设计巧妙。此外,两仿生推进单元收纳或舒展状态下,第一滑块可卡入至第一滑轨两端的容置腔内,如此可锁定第一滑块的位置,避免受周围水流波动等因素影响、使两仿生推进单元沿滑杆滑移,进而降低推进器运行稳定性;此外第一滑块结构设计合理,包括底板和两立板,两立板间的卡块分别与两仿生推进单元的牵引绳连接,在推进器进行工作和非工作状态的切换时,棘轮组件可通过牵引绳柔性地传递,避免出现应力集中的作用点,有利于提高推进器运行可靠性和使用寿命。
23、本技术中,两仿生推进单元相对独立,可分别驱动,通过控制两驱动杆差速运动,可方便地实现推进器方向控制。此外,为适应复杂多变的水下环境,多源驱动水下作业平台采用仿生推进与螺旋桨推进单元结合的方式,适用范围广,有利于推广应用。
- 还没有人留言评论。精彩留言会获得点赞!