一种仿鲹科鱼类胸鳍的水下机器人
本发明属于水下机器人领域,更具体地,涉及一种仿鲹科鱼类胸鳍的水下机器人。
背景技术:
1、水下机器人一直是科学研究中一个特别有吸引力的课题,几十年来随着科学的发展,研究者们设计了各式各样的水下机器人,其性能也在不断提升。现有研究表明,仿鲹科鱼类的水下机器人具有外形仿生、能接近鱼群摄影、运动噪声小、能耗低的特点,并且相比于目前市面上的水下机器人,其可以非常容易地越过狭窄的通道,环境适应能力强。所以水下仿鲹科鱼类机器人已然成为科学研究的热门话题。现如今,人们已设计并制造出诸多仿鲹科鱼类机器人。
2、在已公布或授权的专利中,在仿鲹科鱼类机器人设计方面,已公开的技术方案大多关注于尾鳍结构的仿生设计,这种仅靠尾鳍驱动的机器鱼存在运动效率低,运动平衡性差且转弯半径大等缺点,并不符合真实的鲹科鱼类游动时胸鳍和尾鳍配合运动的特点,因此仅凭尾鳍驱动的机器鱼大多需要携带大容量的电池才能维持较长的航行时间,不利于减小机器人的尺寸和重量,因此提升机器鱼的运动效率至关重要。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种仿鲹科鱼类胸鳍的水下机器人,其目的在于提升鱼尾摆动效率,提高水下机器人游动效率。
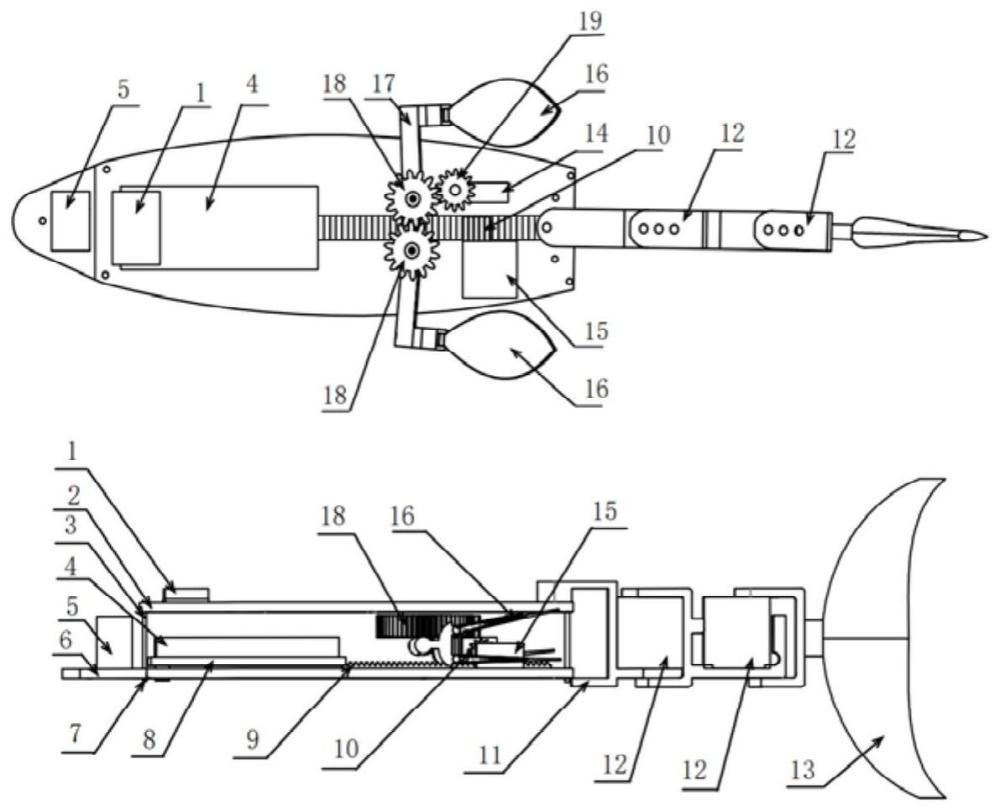
2、为实现上述目的,按照本发明的一个方面,提供了一种仿鲹科鱼类胸鳍的水下机器人,包括:控制器,尾部舵机,尾鳍,胸鳍舵机,相对机器人中轴线左右对称设置的结构尺寸相同的两个胸鳍和两个胸鳍推杆,以及与两个胸鳍推杆的一端分别连接的第一齿轮组;
3、所述尾部舵机用于在所述控制器的控制下带动所述尾鳍摆动,实现前后移动;
4、每个胸鳍由上下层叠设置的两片胸鳍片构成,每个胸鳍中的两片胸鳍片的同一端共同活动设置在对应胸鳍推杆的远离第一齿轮组的一端,该胸鳍中的两片胸鳍片在水冲击下可沿着活动设置的一端相向合并或反向分离;
5、所述胸鳍舵机用于在所述控制器的控制下通过第一齿轮组带动两个胸鳍推杆沿着与齿轮组连接的一端同步向前或向后转动,以使得两个胸鳍同步向前或向后运动,相应地在水流阻力作用下每个胸鳍中的两个胸鳍片相向合并或反向分离,从而向鱼尾产生对应的涡流,提升机器人的运动速度。
6、进一步,还包括:重心舵机,第二齿轮组,平行于所述中轴线设置的电池支架,以及设置在所述电池支架上的电池;
7、所述电池支架的一端与所述第二齿轮组连接,所述第二齿轮组能够在所述重心舵机的控制下带动所述电池支架向前平移或向后平移,以改变机器人的重心位置,当在机器人前进运动过程中改变机器人的重心位置时,能够改变水流阻力在竖直方向上的分量,实现机器人的上浮或下潜。
8、进一步,所述第二齿轮组包括齿条以及与该齿条一端啮合的齿轮;所述齿条的另一端与所述电池支架的一端连接。
9、进一步,所述尾部舵机有两个,两个尾部舵机在所述控制器的控制下按照鱼体波方程进行转动,以带动尾鳍摆动。
10、进一步,所述控制器控制两个尾部舵机按照鱼体波方程进行转动的实现方式为:
11、所述控制器依次调用数组中的各终点角度数据,以控制尾部舵机从其当前所处角度位置转动到所调用的终点角度数据对应的位置,完成一个对应角度范围的转动,最终完成机器人依照整个鱼体波方程曲线的移动,实现对真实鱼尾运动的精确模拟;
12、其中,各终点角度数据是通过以下方式确定得到:
13、将一个周期内的鱼体波方程曲线离散为预设数量个小曲线段,每一个小曲线段对应尾部舵机所要执行的一个角度转动范围,预先将对应预设数量个角度转动范围对应的终点角度数据存储在特定数组中。
14、进一步,所述第一齿轮组包括两个尺寸相同的大齿轮和一个小齿轮;
15、其中,两个大齿轮相对机器人中轴线左右对称设置,小齿轮与所述胸鳍舵机连接,小齿轮、其中一个大齿轮、另一个大齿轮依次啮合,两个大齿轮对应与两个胸鳍推杆连接,以对应带动两个胸鳍推杆同步转动。
16、进一步,还包括与所述控制器连接的设置在机器人头部的摄像头,且所述控制器能够基于摄像头所传输的信息形成新的运动指令信号并传输至各舵机,实现自主运动控制。
17、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
18、(1)考虑到鱼鳍结构在鱼体运动过程中至关重要,具体表现为能向鱼尾输出涡流,改变鱼尾附近流场,从而提升鱼尾摆动效率。因此,本发明提出了一种仿鲹科鱼类胸鳍结构的水下机器人,包括:胸鳍舵机,相对机器人中轴线左右对称设置的结构尺寸相同的两个胸鳍和两个胸鳍推杆,以及与两个胸鳍推杆的一端分别连接的第一齿轮组。每个胸鳍由上下层叠设置的两片胸鳍片构成,每个胸鳍中的两片胸鳍片的同一端共同活动设置在对应胸鳍推杆的远离第一齿轮组的一端,该胸鳍中的两片胸鳍片在水冲击下可沿着活动设置的一端相向合并或反向分离;胸鳍舵机用于在控制器的控制下通过第一齿轮组带动两个胸鳍推杆沿着与齿轮组连接的一端同步向前或向后转动,以使得两个胸鳍同步向前或向后运动,当向前转动时,由于水流作用于胸鳍的外表面,会将胸鳍压至水平位置,因此推杆向前转动时受到的阻力很小;当推杆向后转动时,由于水流作用于胸鳍的内表面,会将胸鳍推至竖直位置,此时胸鳍与水体作用力达到最大,两者作用向鱼尾产生涡流,改变鱼尾附近的流场,降低鱼尾摆动的阻力,从而机器鱼游动地更快。
19、(2)本发明在结构上采用舵机模拟鱼尾代替螺旋桨,噪音低便于接近鱼群进行摄影。
技术特征:
1.一种仿鲹科鱼类胸鳍的水下机器人,其特征在于,包括:控制器,尾部舵机,尾鳍,胸鳍舵机,相对机器人中轴线左右对称设置的结构尺寸相同的两个胸鳍和两个胸鳍推杆,以及与两个胸鳍推杆的一端分别连接的第一齿轮组;
2.根据权利要求1所述的水下机器人,其特征在于,还包括:重心舵机,第二齿轮组,平行于所述中轴线设置的电池支架,以及设置在所述电池支架上的电池;
3.根据权利要求2所述的水下机器人,其特征在于,所述第二齿轮组包括齿条以及与该齿条一端啮合的齿轮;所述齿条的另一端与所述电池支架的一端连接。
4.根据权利要求1所述的水下机器人,其特征在于,所述尾部舵机有两个,两个尾部舵机在所述控制器的控制下按照鱼体波方程进行转动,以带动尾鳍摆动。
5.根据权利要求4所述的水下机器人,其特征在于,所述控制器控制两个尾部舵机按照鱼体波方程进行转动的实现方式为:
6.根据权利要求1所述的水下机器人,其特征在于,所述第一齿轮组包括两个尺寸相同的大齿轮和一个小齿轮;
7.根据权利要求1所述的水下机器人,其特征在于,还包括与所述控制器连接的设置在机器人头部的摄像头,且所述控制器能够基于摄像头所传输的信息形成新的运动指令信号并传输至各舵机,实现自主运动控制。
技术总结
本发明属于水下机器人领域,具体涉及一种仿鲹科鱼类胸鳍的水下机器人,包括:控制器,胸鳍舵机,相对机器人中轴线左右对称设置的结构尺寸相同的两个胸鳍和两个胸鳍推杆,以及与两个胸鳍推杆的一端分别连接的第一齿轮组;每个胸鳍由上下层叠设置的两片胸鳍片构成,该两片胸鳍片的同一端共同活动设置在对应胸鳍推杆的远离第一齿轮组的一端,该两片胸鳍片在水冲击下可沿着活动设置的一端相向合并或反向分离;胸鳍舵机用于在控制器的控制下通过第一齿轮组带动两个胸鳍推杆沿着与齿轮组连接的一端同步向前或向后转动,以使得两个胸鳍同步向前或向后运动,影响机器人的运动速度。本发明能提升水下机器人整体运动稳定性,加快游动速度。
技术研发人员:代胡亮,杨正铖,何毅翔,邢浩然,王琳
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!