一种具有智能动态减摇系统的船舶
本发明涉及船舶工程,具体而言,尤其涉及一种具有智能动态减摇系统的船舶。
背景技术:
1、船舶在海浪中航行,由于受到风、浪、海流等因素的影响,将产生6个自由度的运动:横摇、纵摇、艏摇、横荡、纵荡、垂荡。如果对这些运动的控制不当,便会引起姿态失稳,危及船舶航行安全。考虑到传统减摇系统在复杂海洋环境下的局限性,如“鲁济宁货30xx”轮船事故和golden ray事故所示,存在一种对船舶减摇系统进行优化的需求,以提高船舶的稳定性和安全性。现有技术在装载和操纵方面存在不足,导致事故发生。
2、2012年8月31日1025时许,微山县y航运有限公司所属的“鲁济宁货30xx”轮载运钢材787.32吨由徐州驶往常州,在从京杭运河六圩河口出口进入长江航行过程中,因装载不当,大角度转向操作时船舶发生右倾翻沉,船上3人全部落水,其中2人获救,1人死亡。
3、在2019年9月8日,滚装车辆运输船golden ray在美国乔治亚州布伦瑞克附近的圣西蒙斯海峡航行时发生了倾覆事故。这次事故的主要原因是船长错误输入了压载量到稳定性计算程序中,导致对船舶稳定性的错误判断。golden ray在出港转向时,由于右倾臂不足以抵抗转向过程中产生的力,导致船舶迅速向左倾斜并最终搁浅。船上23名船员和1名引水员被救,其中4名工程船员被困约40小时,2人受重伤。golden ray因火灾、淹水和盐水腐蚀损坏严重,被宣布全损,估计损失约6250万美元。约价值1.42亿美元的货物,包括4100多辆车辆也丢失。
4、结合了多自由度控制、卡尔曼滤波、mpc控制等技术,实现了船舶智能动态减摇系统。这一系统通过中央处理单元协调各个子系统,运用卡尔曼滤波进行准确测量,采用mpc控制实时调整船舶姿态,大幅提高了船舶稳定性和安全性。
技术实现思路
1、根据上述提出的如何提高船舶在复杂海洋环境下的稳定性的技术问题,提供一种具有智能动态减摇系统的船舶。本发明结合了多自由度控制、卡尔曼滤波、mpc控制等技术,设计了一种船舶智能动态减摇系统,该系统运用卡尔曼滤波进行准确测量,采用mpc控制实时调整船舶姿态,大幅提高了船舶稳定性和安全性。
2、本发明采用的技术手段如下:
3、一种具有智能动态减摇系统的船舶,包括:船舶本体,还包括:设置在船舶本体上的执行机构和智能控制系统,其中:
4、所述智能控制系统,引入卡尔曼滤波和马尔可夫过程作为数据处理和决策算法,预测船舶未来运动趋势,制定稳定策略,得到决策结果,基于决策结果进行动态调整,得到反馈调整后的控制指令;
5、所述执行机构,连接智能控制系统,用于根据控制指令调整船舶姿态。
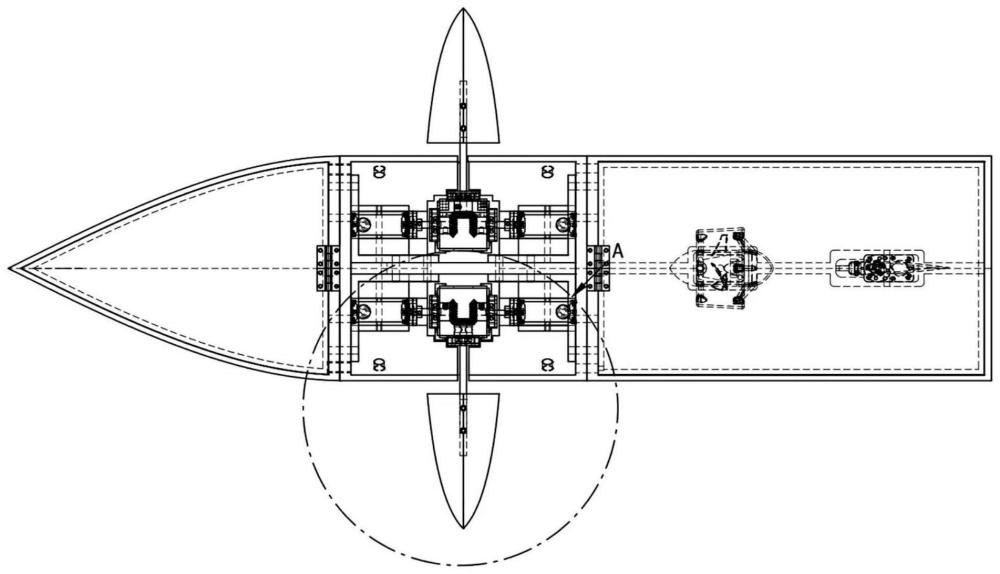
6、进一步地,所述执行机构包括转角器,用于实现船舶的2自由度运动,转角器包括第一动力输入轴、第二动力输入轴以及输出轴,当第一动力输入轴和第二动力输入轴同向转动时,输出轴绕着第一动力输入轴和第二动力输入轴为圆心进行旋转;当第一动力输入轴和第二动力输入轴反向转动时,输出轴绕着自身轴心旋转。
7、进一步地,所述第一动力输入轴与一个舵机连接,通过伞齿轮传递动力,第一动力输入轴用于负责控制输出轴的旋转方向。
8、进一步地,所述第二动力输入轴与另一个舵机连接,通过伞齿轮传递动力,且第二动力输入轴与第一动力输入轴同轴排列,使第一动力输入轴和第二动力输入轴在相同的平面内运动。
9、进一步地,所述输出轴连接在第一动力输入轴和第二动力输入轴之间,且分别与第一动力输入轴和第二动力输入轴垂直设置,当第一动力输入轴和第二动力输入轴同向转动时,伞齿轮的传动使得输出轴绕着第一动力输入轴和第二动力输入轴为圆心进行旋转;当第一动力输入轴和第二动力输入轴反向转动时,伞齿轮的传动使得输出轴绕着自身轴心旋转。
10、进一步地,所述智能控制系统包括数据获取单元、数据处理单元、控制决策单元以及自适应调整单元,其中:
11、所述数据获取单元,用于捕捉船舶运动和环境信息,采用传感器网络,包括陀螺仪、加速度计、gps、深度传感器;
12、所述数据处理单元,连接数据获取单元,采用卡尔曼滤波算法处理数据获取单元获取的数据;
13、所述控制决策单元,连接数据处理单元,基于数据处理单元处理后的数据,采用模型预测控制算法预测船舶未来运动趋势,制定稳定策略,得到决策结果;
14、所述自适应调整单元,连接控制决策单元,基于决策结果进行动态调整,并反馈调整后的控制指令至转角器,以应对变化的环境。
15、进一步地,在所述数据处理单元中,采用卡尔曼滤波算法处理数据获取单元获取的数据,具体包括:
16、构建卡尔曼滤波器:
17、建立状态方程,如下:
18、xt+1=axt+but+wt
19、其中,xt表示系统状态,ut表示外部输入,a和b分别表示矩阵,wt表示过程噪声;
20、建立观测方程(观测与状态的关系),如下:
21、zt=hxt+vt
22、其中,zt表示时刻t的观测值,h表示观测矩阵,vt表示观测噪声
23、采用构建的卡尔曼滤波器进行状态预测,如下:
24、
25、
26、采用构建的卡尔曼滤波器进行状态更新,如下:
27、
28、
29、
30、其中,表示状态的估计值,pt+1表示状态估计的协方差矩阵,q表示过程噪声协方差矩阵,r表示观测噪声协方差矩阵。
31、进一步地,在所述控制决策单元中,模型预测控制算法,具体包括:
32、计算马尔可夫链的转移概率:
33、假设有一个状态空间s,将一个马尔可夫链的转移概率用以下公式表示:
34、p(xt+1=xt+1|xt=xt,xt-1=xt-1,...,x0=x0)=p(xt+1=xt+1|xt=xt)
35、上式表示下一时刻的状态xt+1在给定当前状态xt的情况下,不依赖于过去时刻的状态
36、计算马尔可夫模型的状态转移矩阵:
37、如果状态空间是有限的,将状态转移概率用矩阵表示:
38、
39、其中,pij表示从状态i转移到状态j的概率。
40、较现有技术相比,本发明具有以下优点:
41、1、本发明提供的具有智能动态减摇系统的船舶,采用伞齿轮配合的结构,使得三个轴能够互相垂直排列,从而有效节省空间,适用于有限空间的场景。
42、2、本发明提供的具有智能动态减摇系统的船舶,其第一动力输入轴和第二动力输入轴同轴排列,简化了机械结构的设计,并提高了结构的稳定性。
43、3、本发明提供的具有智能动态减摇系统的船舶,其第一动力输入轴和第二动力输入轴均通过舵机控制,能够实现同向和反向转动,使得输出轴的运动更加灵活,适应多样化的控制需求。
44、4、本发明提供的具有智能动态减摇系统的船舶,其由于执行机构支持输出轴围绕不同轴心进行旋转,因此本发明船舶具备多种运动模式,同时增强了执行机构的功能性。
45、5、本发明提供的具有智能动态减摇系统的船舶,由于输出轴的特殊运动,该结构不仅适用于导向(同向转动)操作,还适用于需要驱动(反向转动)的场景,具备更广泛的应用性。
46、基于上述理由本发明可在船舶工程等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!