飞行器在线序列凸优化中的初始轨迹生成方法及系统
1.本发明涉及飞行器制导控制技术领域,特别是一种在线序列凸优化中的初始轨迹生成方法及系统。
背景技术:
2.运载火箭子级回收技术是实现发动机可重复使用,降低太空进入成本的关键技术之一。垂直着陆段是回收过程的最后一个阶段,该段采用变推力发动机进行控制以实现火箭定点着陆,这对制导方法的鲁棒性和可靠性提出了更高的要求。目前较为成功的制导方案是基于参考轨迹在线生成的制导方法,该方法在每一个规划周期内根据当前状态进行参考轨迹的在线生成,对干扰因素的适应性更广,且提高了制导方法的鲁棒性。这种制导方法的核心是参考轨迹的在线生成,目前具备在线应用潜力的轨迹规划方法主要是序列凸化方法,该方法充分利用凸优化问题求解的快速性,在给定一条初始轨迹和离散点数目等条件下,基于当前状态进行参考轨迹的在线规划。初始轨迹的选择将直接影响序列凸化的收敛速度和精度,从而影响参考轨迹的更新频率和精度,最终体现在对制导方法性能的影响上。传统的初始轨迹基于线性假设得到,即认为所有运动状态量都是线性变化,这种方法得到的初始轨迹由于不满足动力学约束,与真实轨迹偏差较大,所以序列凸化的收敛速度较低,甚至不收敛,其主要应用于对收敛速度要求不高的离线序列凸化中,难以满足在线序列凸化对收敛速度的要求。
技术实现要素:
3.本发明所要解决的技术问题是,针对现有技术不足,提供一种在线序列凸优化中的初始轨迹生成方法及系统,解决基于线性假设的初始轨迹生成方法容易导致序列凸化收敛速度慢甚至不收敛的问题,实现在线序列凸化的快速收敛。
4.为解决上述技术问题,本发明所采用的技术方案是:一种飞行器在线序列凸优化中的初始轨迹生成方法,包括:
5.在第一个规划周期内,采用线性假设方法生成初始轨迹;
6.从第二个规划周期开始,基于最近一次规划成功的参考轨迹确定当前周期用于在线序列凸优化的初始轨迹。
7.本发明提出一种在线序列凸优化中的初始轨迹生成方法,该方法仅在第一个规划周期内采用线性假设生成初始轨迹,从第二个周期开始,基于最近一次规划成功的参考轨迹确定当前周期用于在线序列凸优化的初始轨迹。这种方法有效提高了后续规划周期内生成初始轨迹的精度,减少了序列凸化迭代次数,提高了收敛速度,同时制导精度可以得到保证。
8.在第一个规划周期内,采用线性假设方法生成初始轨迹的具体实现过程包括:
9.设从当前状态到终端状态s
f
的位置速度随时间线性变化,从当前状态到终
端状态s
f
的时间范围内各个均匀离散时刻为上标1表示第1个规划周期,下标表示离散时刻序号,n为离散点数目,则当前规划周期的初始轨迹为令规划周期序号k=1,其中为位置x方向分量在不同离散时刻处的取值,为位置y方向分量在不同离散时刻处的取值,为位置z方向分量在不同离散时刻处的取值,为速度x方向分量在不同离散时刻处的取值,为速度y方向分量在不同离散时刻处的取值,为速度z方向分量在不同离散时刻处的取值,上述位置分量和速度分量的下标均表示离散点序号,当前状态终端状态s
f
=[0 0 0 0 0 0]
τ
。采用线性假设的初始轨迹生成方法具有工程实现简单、计算量小等优势。
[0010]
取值为0,根据火箭子级回收垂直着陆段动力学特性分析,将取值范围设置为20~60s可以包含绝大部分着陆段飞行时间,以此确保通过在线序列凸优化算法可以成功规划出可行参考轨迹。
[0011]
本发明从第二个规划周期开始,基于最近一次规划成功的参考轨迹确定当前周期用于在线序列凸优化的初始轨迹的实现过程包括:确定当前规划周期进行在线序列凸优化的初始时间和终端时间,对该时间范围进行离散化;若前一个规划周期得到有效的参考轨迹,则由该参考轨迹进行线性插值;否则,以倒数第二个规划周期的参考轨迹进行线性插值,从而得到上述时间范围内每一个离散点处的状态量;所述离散点处的状态量构成当前规划周期内进行在线序列凸优化的初始轨迹。进一步有效解决因初始轨迹误差较大导致的在线序列凸优化收敛速度慢的问题。
[0012]
获取所述离散点处的状态量的具体实现过程包括:
[0013]
1)基于初始化轨迹执行在线序列凸优化算法,当算法收敛后,输出第k个规划周期得到的参考轨迹r
(k)
,为下一个规划周期的初始轨迹生成奠定基础;
[0014]
2)测量得到当前运动状态为将作为第k+1个规划周期的初始时刻,且t
planning
表示规划周期,运动状态作为第k+1个规划周期的初始状态,为第k+1个规划周期执行在线序列凸优化算法提供初值;
[0015]
3)当时,结束;否则,转入步骤4);其中,ε
h
为落地条件判断容忍度;该步骤用于判断在线轨迹规划是否终止;
berning.successive convexification for fuel
‑
optimal powered landing with aerodynamic drag and non
‑
convex constraints[c].aiaa guidance,navigation,and control conference.san diego,california usa,2016。
[0026]
1)设置在线序列凸优化方法所采用的离散点数目为n,n为正整数,一般可取10
‑
100,第1次轨迹规划的飞行时间范围为100,第1次轨迹规划的飞行时间范围为一般取0,可取20
‑
60s之间任意实数。所有位置速度状态量均在着陆坐标系内进行描述,着陆段的终端状态设置为s
f
=[0 0 0 0 0 0]
τ
,前三个分量表示三个方向的位置,后三个分量表示三个方向的速度。进入着陆段后由导航设备测量得到第1个规划周期对应的初始状态为假设从当前状态到终端状态s
f
的位置速度随时间线性变化,该时间范围内各个均匀离散时刻为上标1表示第1个规划周期,下标表示离散时刻序号,则第1个规划周期的初始轨迹为对应时间变化范围为令规划周期序号k=1,其中为位置x方向分量在不同离散时刻处的取值,为位置y方向分量在不同离散时刻处的取值,为位置z方向分量在不同离散时刻处的取值,为速度x方向分量在不同离散时刻处的取值,为速度y方向分量在不同离散时刻处的取值,为速度z方向分量在不同离散时刻处的取值,每个离散点处对应的时刻为其中
[0027]
2)基于初始化轨迹执行在线序列凸优化算法,当算法收敛后,输出第k个规划周期得到的参考轨迹r
(k)
;
[0028]
3)导航设备测量得到当前运动状态为分别表示三个方向的位置和速度分量。将作为第k+1个规划周期的初始时刻,且运动状态作为第k+1个规划周期的初始状态;
[0029]
4)当时,说明火箭落地条件成立,此时程序结束;否则,转入第5步;
[0030]
5)以为第k+1个规划周期进行在线序列凸化的时间范围,将该区间等分为n
‑
1个间隔,得到该时间范围内各个离散点处对应时刻,记为且
[0031]
6)若第k个轨迹规划周期得到的参考轨迹r
(k)
是非空的,即轨迹规划成功,则执行第7步,否则,执行第8步;
[0032]
7)基于第k个规划周期得到的参考轨迹进行线性插值,包括位置速度共六个状态量的线性插值,从而获得六个状态量在各个离散时刻上的取值,记为将其作为第k+1个规划周期进行在线序列凸化的初始化轨迹。令k=k+1,转入第2步;
[0033]
8)基于第k
‑
1个规划周期得到的参考轨迹进行线性插值,包括位置速度共六个状态量的线性插值,从而获得六个状态量在各个离散时刻上的取值,记为将其作为第k+1个规划周期进行在线序列凸化的初始轨迹。令k=k+1,转入第2步;
[0034]
本发明另一实施例还提供了一种飞行器在线序列凸优化中的初始轨迹生成系统,其包括计算机设备;所述计算机设备被配置或编程为用于执行上述实施例方法的步骤。为便于获取相关数据,所述计算机设备与飞行器的导航设备通信。导航设备用于测量飞行器当前运动状态。
[0035]
下面给出一个实验验证本发明的有益效果。
[0036]
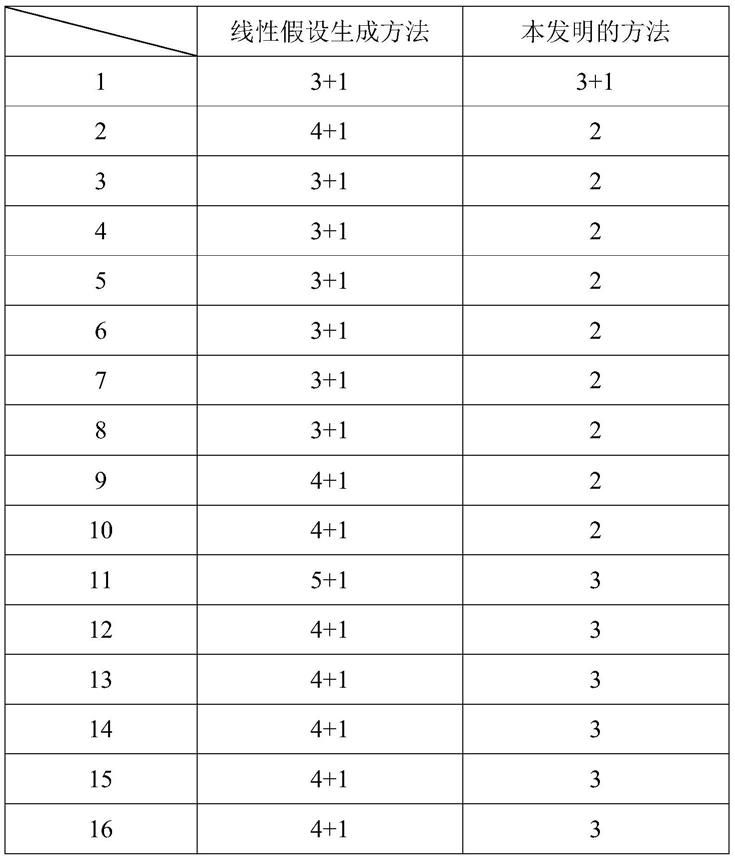
为了验证本发明中所提方法可以提高序列凸优化算法的收敛速度,以下实验将本发明的方法与采用线性假设的初始轨迹生成方法进行对比。表1对比了两种方法应用在序列凸优化算法中所需迭代次数对比结果。可以看出,采用本发明的方法生成初始轨迹有助于减少序列凸优化算法迭代次数,提高收敛速度。表2给出了两种方法下着陆制导精度对比,可以看出,两种方法均能够满足着陆制导精度要求。说明在着陆制导精度基本一致的条件下,本发明的方法可以使得序列凸优化算法具有更快的收敛速度。
[0037]
表1不同方法下序列凸化迭代次数对比
[0038][0039][0040]
注意,上表1中“x+1”表示线性假设生成方法执行1次,序列凸化迭代x次;“x”表示采用本发明所提方法生成初始轨迹,序列凸化迭代x次。
[0041]
表2不同方法下着陆制导精度对比
[0042] 线性假设生成方法本发明的方法
x0.03400.0323y
‑
0.06250.0720z0.01180.0135vx0.00580.0073vy
‑
0.2070
‑
0.2392vz0.03930.0450
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1