一种岩土工程勘察信息化集成监管装置的制作方法
1.本发明涉及岩土工程勘查领域,更具体地说,尤其是涉及到一种岩土工程勘察信息化集成监管装置。
背景技术:
2.岩土工程在进行施工的过程中,需要使用到勘查监管装置对工程整体的施工过程中进行勘查监控,常用的勘查监管装置为无人机携带监控进行飞行勘查,将整个岩土工程进行全面的拍摄并且将信息进行传递,较好的进行监管,但是由于岩土工程在进行施工时,工程周围的环境产生较多的尘土,尘土在空气中发生飘浮,从而与无人机上的监控发生接触,导致尘土覆盖在监控拍摄端,并且无人机在进行飞行的过程中,监控容易随着无人机的飞行发生倾斜,降低监控对岩土工程施工过程中的拍摄清晰度,从而导致对岩土工程的勘查监管效果下降。
技术实现要素:
3.本发明实现技术目的所采用的技术方案是:该一种岩土工程勘察信息化集成监管装置,其结构包括无人机身、驱动轴、扇叶、机械臂、监控装置,所述无人机身外侧端固定安装有驱动轴,并且驱动轴顶部设有扇叶,所述无人机身顶部中端与机械臂一端相焊接,并且机械臂另一端安装有监控装置,所述监控装置包括外壳、伸缩监管机构、平衡机构,所述外壳内部安装有伸缩监管机构,并且外壳上端外侧与平衡机构下端相连接,所述平衡机构上端与机械臂机械连接。
4.作为本发明的进一步改进,所述伸缩监管机构包括气杆、摄像机、转动轴、摄像头、摆动机构,所述气杆固定安装在外壳左端内部,并且气杆输出端与摄像机相固定,所述摄像机右端安装有转动轴,并且转动轴与摄像头相铰接,所述摄像头与摄像机电连接,所述摄像头采用间隙配合贯穿于摆动机构内部,并且摆动机构安装在外壳右端内部,所述摄像机、转动轴和摄像头位于同一水平线上。
5.作为本发明的进一步改进,所述摆动机构包括摆动框、滑动轴、滑轨、开闭清理器,所述摆动框安装在外壳右端内部,并且滑动轴设在摆动框外侧端,所述滑动轴滑动安装在滑轨内部,所述开闭清理器嵌在摆动框内部中端,并且摄像头采用间隙配合贯穿于开闭清理器内部,所述滑动轴和滑轨均设有两个,分别设在摆动框的上下两端。
6.作为本发明的进一步改进,所述开闭清理器包括外环、转动块、扭力轴、开闭片、毛刷,所述外环内部通过扭力轴与转动块相铰接,并且转动块固定安装在开闭片外侧端,所述开闭片位于外环内侧,所述开闭片外表面设有毛刷,所述转动块、扭力轴和开闭片均设有八个,并且呈环型均匀分布在外环内侧。
7.作为本发明的进一步改进,所述平衡机构包括铰接板、立板、挤压回位机构,所述铰接板上端与机械臂相铰接,并且铰接板下端与立板上端相铰接,所述立板下端与挤压回位机构上端中部相焊接,所述挤压回位机构下端安装在外壳上端外侧,所述立板与挤压回
位机构上端中部呈垂直角度焊接。
8.作为本发明的进一步改进,所述挤压回位机构包括平衡板、立柱、转动球、挤压杆、弹簧管套,所述平衡板上端中部与立板下端相焊接,所述平衡板外侧通过转动球与立柱内部轴连接,所述挤压杆上端焊接于平衡板底部,并且挤压杆下端采用间隙配合安装在弹簧管套内部,所述弹簧管套下端固定安装在外壳上端,所述立柱下端通过转动球与外壳上端外侧相连接,所述立柱设有两个,并且转动球设有四个,两个立柱分别位于平衡板左右两侧。
9.本发明的有益效果在于:1.摄像头在进行推出的过程中,贯穿于开闭清理器内部,通过推力使得开闭片绕着扭力轴进行转动,同时毛刷与摄像头表面发生接触,从而对摄像头外表面进行清理,提高摄像头勘查监管的清晰度,同时当摄像头缩回外壳右端内部后,通过扭力轴带动开闭片进行自动闭合,避免尘土覆盖在摄像头表面。
10.2.外壳和伸缩监管机构自身具有一定的重力,通过平衡板与立柱之间设置的转动球和立柱与外壳之间设置的转动球,快速的转动平稳回位,同时通过两侧的挤压杆在弹簧管套内部进行弹性挤压,使得平衡板与外壳之间快速的保持平衡,避免在飞行的过程中外壳发生较大的倾斜角度,提高外壳内部摄像头的监控清晰度。
附图说明
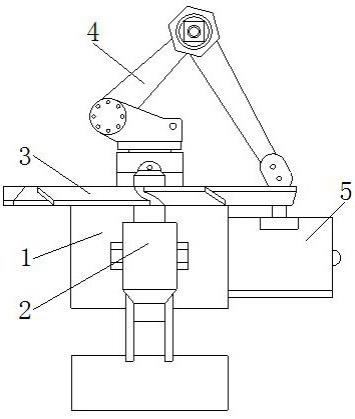
11.图1为本发明一种岩土工程勘察信息化集成监管装置的结构示意图。
12.图2为本发明一种监控装置的结构示意图。
13.图3为本发明一种伸缩监管机构的结构示意图。
14.图4为本发明一种摆动机构的内部结构示意图。
15.图5为本发明一种开闭清理器的侧视结构示意图。
16.图6为本发明一种平衡机构的结构示意图。
17.图7为本发明一种挤压回位机构的结构示意图。
18.图中:无人机身-1、驱动轴-2、扇叶-3、机械臂-4、监控装置-5、外壳-51、伸缩监管机构-52、平衡机构-53、气杆-521、摄像机-522、转动轴-523、摄像头-524、摆动机构-525、摆动框-25a、滑动轴-25b、滑轨-25c、开闭清理器-25d、外环-d1、转动块-d2、扭力轴-d3、开闭片-d3、毛刷-d5、铰接板-531、立板-532、挤压回位机构-533、平衡板-33a、立柱-33b、转动球-33c、挤压杆-33d、弹簧管套-33e。
具体实施方式
19.以下结合附图对本发明做进一步描述:实施例1:如附图1至附图5所示:本发明一种岩土工程勘察信息化集成监管装置,其结构包括无人机身1、驱动轴2、扇叶3、机械臂4、监控装置5,所述无人机身1外侧端固定安装有驱动轴2,并且驱动轴2顶部设有扇叶3,所述无人机身1顶部中端与机械臂4一端相焊接,并且机械臂4另一端安装有监控装置5,所述监控装置5包括外壳51、伸缩监管机构52、平衡机构53,所述外壳51内部安装
有伸缩监管机构52,并且外壳51上端外侧与平衡机构53下端相连接,所述平衡机构53上端与机械臂4机械连接。
20.其中,所述伸缩监管机构52包括气杆521、摄像机522、转动轴523、摄像头524、摆动机构525,所述气杆521固定安装在外壳51左端内部,并且气杆521输出端与摄像机522相固定,所述摄像机522右端安装有转动轴523,并且转动轴523与摄像头524相铰接,所述摄像头524与摄像机522电连接,所述摄像头524采用间隙配合贯穿于摆动机构525内部,并且摆动机构525安装在外壳51右端内部,所述摄像机522、转动轴523和摄像头524位于同一水平线上,确保转动轴523带动摄像头524在摄像机522右侧端进行平稳的转动,从而对摄像头524的角度进行调节,提高摄像头524监控的范围。
21.其中,所述摆动机构525包括摆动框25a、滑动轴25b、滑轨25c、开闭清理器25d,所述摆动框25a安装在外壳51右端内部,并且滑动轴25b设在摆动框25a外侧端,所述滑动轴25b滑动安装在滑轨25c内部,所述开闭清理器25d嵌在摆动框25a内部中端,并且摄像头524采用间隙配合贯穿于开闭清理器25d内部,所述滑动轴25b和滑轨25c均设有两个,分别设在摆动框25a的上下两端,确保摄像头524在进行角度调节转动时,摆动框25a也能够进行平稳的弧形摆动。
22.其中,所述开闭清理器25d包括外环d1、转动块d2、扭力轴d3、开闭片d3、毛刷d5,所述外环d1内部通过扭力轴d3与转动块d2相铰接,并且转动块d2固定安装在开闭片d3外侧端,所述开闭片d3位于外环d1内侧,所述开闭片d3外表面设有毛刷d5,所述转动块d2、扭力轴d3和开闭片d3均设有八个,并且呈环型均匀分布在外环d1内侧,利于摄像头524在伸出时与毛刷d5发生接触,从而对摄像头524表面进行清理,而摄像头524缩回时,开闭片d3自动闭合,避免摄像头524在不工作时空气中的尘土覆盖在摄像头524表面,提高摄像头524监管的清晰度。
23.本实施例的具体使用方式与作用:本发明中,通过驱动轴2带动扇叶3进行转动,从而使得无人机身1进行飞行,飞行的过程中,通过机械臂4对监控装置5进行位置调节,外壳51内部的气杆521进行伸长,从而推动摄像机522进行移动,将摄像头524推出外壳51右侧内部,从而使得摄像头524对岩土工程进行勘查监管,通过转动轴523能够带动摄像头524在摄像机522右侧端进行角度转动调节,提高摄像头524勘查监管的监控范围,同时滑动轴25b在滑轨25c内部进行滑动,确保摆动框25a内部的开闭清理器25d随着摄像头524进行摆动调节,摄像头524在进行推出的过程中,贯穿于开闭清理器25d内部,通过推力使得开闭片d3绕着扭力轴d3进行转动,同时毛刷d5与摄像头524表面发生接触,从而对摄像头524外表面进行清理,提高摄像头524表面的洁净度,提高摄像头524勘查监管的清晰度,同时当摄像头524缩回外壳51右端内部后,通过扭力轴d3带动开闭片d3进行自动闭合,从而对摄像头524进行阻挡,避免尘土覆盖在摄像头524表面。
24.实施例2:如附图6至附图7所示:其中,所述平衡机构53包括铰接板531、立板532、挤压回位机构533,所述铰接板531上端与机械臂4相铰接,并且铰接板531下端与立板532上端相铰接,所述立板532下端与挤压回位机构533上端中部相焊接,所述挤压回位机构533下端安装在外壳51上端外侧,所
述立板532与挤压回位机构533上端中部呈垂直角度焊接,通过立板532的连接,确保挤压回位机构533与机械臂4保持竖直方位连接,提高挤压回位机构533下端的外壳51平衡度。
25.其中,所述挤压回位机构533包括平衡板33a、立柱33b、转动球33c、挤压杆33d、弹簧管套33e,所述平衡板33a上端中部与立板532下端相焊接,所述平衡板33a外侧通过转动球33c与立柱33b内部轴连接,所述挤压杆33d上端焊接于平衡板33a底部,并且挤压杆33d下端采用间隙配合安装在弹簧管套33e内部,所述弹簧管套33e下端固定安装在外壳51上端,所述立柱33b下端通过转动球33c与外壳51上端外侧相连接,所述立柱33b设有两个,并且转动球33c设有四个,两个立柱33b分别位于平衡板33a左右两侧,通过上端的两个转动球33c,提高两个立柱33b与平衡板33a之间转动的平稳速度,同时通过下端的两个转动球33c,提高两个立柱33b与外壳51之间转动的平稳速度,从而确保平衡板33a与外壳51之间保持快速的平稳,避免在飞行的过程中外壳51发生较大的倾斜角度,提高外壳51内部摄像头524的监控清晰度。
26.本实施例的具体使用方式与作用:本发明中,机械臂4在对监控装置5进行位置调节的过程中,经过铰接板531和立板532的铰接连接,从而确保机械臂4与平衡板33a之间始终保持在相互垂直的角度上,由于外壳51和伸缩监管机构52自身具有一定的重力,位置调节过程中,通过平衡板33a与立柱33b之间设置的转动球33c和立柱33b与外壳51之间设置的转动球33c,从而使得外壳51在发生重力倾斜偏移的过程中,快速的转动平稳回位,同时通过两侧的挤压杆33d在弹簧管套33e内部进行弹性挤压,快速的挤压复位,从而使得平衡板33a与外壳51之间快速的保持平衡,避免在飞行的过程中外壳51发生较大的倾斜角度,提高外壳51内部摄像头524的监控清晰度。
27.利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1