一种低空电缆电力巡检无人机
1.本实用新型涉及无人机技术领域,具体为一种低空电缆电力巡检无人机。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,目前被广泛的应用于航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾和影视拍摄等行业中。
3.现有技术中申请号为号201821878513.2提出了一种低空电缆电力巡检无人机,该低空电缆电力巡检无人机包括:无人机本体以及绝缘架;其中,绝缘架包括圆形的绝缘架体,无人机本体的上下两端以及前后两端均设置有与绝缘架体连接的第一绝缘杆;无人机的一侧铰接有第二绝缘杆,第二绝缘杆的端部设置有用于夹合在电缆线上的定向移动装置,定向移动装置连接有机械式的控制开关。
4.其清理效果差,使用不灵活,实用性低。
技术实现要素:
5.本实用新型要解决的技术问题是克服现有的缺陷,提供一种低空电缆电力巡检无人机,清理效果好,使用灵活,实用性高,可以有效解决背景技术中的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种低空电缆电力巡检无人机,包括无人机本体、摄像头、飞行单元和清理单元;
7.无人机本体:上安装有摄像头和飞行单元;
8.清理单元:包含动力组件、传动组件、清理半环、固定块、连接杆和齿环和转杆,所述无人机本体的底侧设有通槽,所述转杆有两个,且两个转杆的两端分别与通槽内部左右两端的前后两侧转动连接,所述转杆的中端外侧套接有齿环,所述齿环上设有连接杆,所述连接杆通过固定块连接清理半环。
9.通过动力组件和传动组件控制两个齿环同步反向转动,使连接杆发生角度转动,从而控制两个清理半环对电缆线上存留的累积物进行清理,清理半环的背侧设有螺纹连接杆,通过与固定块上的螺孔螺纹连接,对清理半环进行固定,可以更换不同大小的清理半环,对不同的电缆进行清理。
10.进一步的,所述传动组件包含丝杠和齿块,所述丝杠安装在动力组件上,所述丝杠的两端设有两段反向螺纹,所述丝杠的两端均设有一个齿块,且齿块与丝杠螺纹连接,所述齿块的上侧与通槽的内部顶侧贴合滑动,所述齿块与对应的齿环啮合连接。通过动力组件带动丝杠转动,使丝杠与两个齿块螺纹运动,从而带动齿块与齿环啮合运动,两个齿环同步反向转动,使连接杆发生角度转动,从而控制两个清理半环对电缆线上存留的累积物进行清理。
11.进一步的,所述动力组件包含电机二,所述电机二通过电机架固定在通槽的内部
顶侧右端,所述电机二的输出轴连接丝杠的右端,电机二的输入端通过无人机的控制芯片与无人机电源的输出端电连接。电机二控制丝杠转动。
12.进一步的,还包括支架,所述无人机本体的底侧设有支架。支架对无人机本体进行支撑。
13.进一步的,还包括平衡块,所述平衡块安装在通槽的内部顶侧左端。平衡块保证设备的稳定性,防止因为在通槽的内部顶侧右端设有电机二,而导致无人机在运行的时候飞行不平衡。
14.进一步的,所述飞行单元包含转杆、支架、电机一和螺旋桨,所述无人机本体的中端四角设有支架,所述电机一有四个,且电机一通过电机架分别固定在支架外端的上侧,所述电机一的输出轴连接转杆的底侧,所述转杆的上侧设有螺旋桨,电机一的输入端通过无人机的控制芯片与无人机电源的输出端电连接。通过电机一控制转杆转动,从而控制螺旋桨转动,带动无人人机飞行。
15.与现有技术相比,本实用新型的有益效果是:本无人机,具有以下好处:
16.1、通过动力组件和传动组件控制两个齿环同步反向转动,使连接杆发生角度转动,从而控制两个清理半环对电缆线上存留的累积物进行清理。
17.2、通槽的内部顶侧左端设有平衡块,其保证设备的稳定性,防止因为在通槽的内部顶侧右端设有电机二,而导致无人机在运行的时候飞行不平衡。
18.3、清理半环的背侧设有螺纹连接杆,通过与固定块上的螺孔螺纹连接,对清理半环进行固定,可以更换不同大小的清理半环,对不同的电缆进行清理。
附图说明
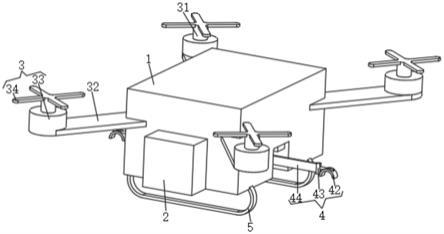
19.图1为本实用新型侧视结构示意图;
20.图2为本实用新型剖视结构示意图。
21.图中:1无人机本体、2摄像头、3飞行单元、31转杆、32支架、33电机一、34螺旋桨、4清理单元、41齿块、42清理半环、43固定块、44连接杆、45齿环、46转杆、47电机二、48丝杠、5支架、6平衡块。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-2,本实施例提供一种技术方案:一种低空电缆电力巡检无人机,包括无人机本体1、摄像头2、飞行单元3和清理单元4;
24.无人机本体1:上安装有摄像头2和飞行单元3;
25.飞行单元3包含转杆31、支架32、电机一33和螺旋桨34,无人机本体1的中端四角设有支架32,电机一33有四个,且电机一33通过电机架分别固定在支架32外端的上侧,电机一33的输出轴连接转杆31的底侧,转杆31的上侧设有螺旋桨34,电机一33的输入端通过无人机的控制芯片与无人机电源的输出端电连接。通过电机一33控制转杆31转动,从而控制螺
旋桨34转动,带动无人人机飞行。
26.清理单元4:包含动力组件、传动组件、清理半环42、固定块43、连接杆44和齿环45和转杆46,无人机本体1的底侧设有通槽,转杆46有两个,且两个转杆46的两端分别与通槽内部左右两端的前后两侧转动连接,转杆46的中端外侧套接有齿环45,齿环45上设有连接杆44,连接杆44通过固定块43连接清理半环42。
27.通过动力组件和传动组件控制两个齿环45同步反向转动,使连接杆44发生角度转动,从而控制两个清理半环42对电缆线上存留的累积物进行清理,清理半环42的背侧设有螺纹连接杆,通过与固定块43上的螺孔螺纹连接,对清理半环42进行固定,可以更换不同大小的清理半环42,对不同的电缆进行清理。
28.传动组件包含丝杠48和齿块41,丝杠48安装在动力组件上,丝杠48的两端设有两段反向螺纹,丝杠48的两端均设有一个齿块41,且齿块41与丝杠48螺纹连接,齿块41的上侧与通槽的内部顶侧贴合滑动,齿块41与对应的齿环45啮合连接。通过动力组件带动丝杠48转动,使丝杠48与两个齿块41螺纹运动,从而带动齿块41与齿环45啮合运动,两个齿环45同步反向转动,使连接杆44发生角度转动,从而控制两个清理半环42对电缆线上存留的累积物进行清理。
29.动力组件包含电机二47,电机二47通过电机架固定在通槽的内部顶侧右端,电机二47的输出轴连接丝杠48的右端,电机二47的输入端通过无人机的控制芯片与无人机电源的输出端电连接。电机二47控制丝杠48转动。
30.还包括支架5,无人机本体1的底侧设有支架5。支架5对无人机本体1进行支撑。
31.还包括平衡块6,平衡块6安装在通槽的内部顶侧左端。平衡块6保证设备的稳定性,防止因为在通槽的内部顶侧右端设有电机二47,而导致无人机在运行的时候飞行不平衡。
32.本实用新型提供的一种低空电缆电力巡检无人机的工作原理如下:通过电机一33控制转杆31转动,从而控制螺旋桨34转动,带动无人人机飞行,通过电机二47带动丝杠48转动,使丝杠48与两个齿块41螺纹运动,从而带动齿块41与齿环45啮合运动,两个齿环45同步反向转动,使连接杆44发生角度转动,从而控制两个清理半环42合拢对电缆线上存留的累积物进行清理。
33.值得注意的是,以上实施例中所公开电机二47和电机一33的型号为ea120,无人机的控制芯片控制电机二47和电机一33工作采用现有技术中常用的方法。
34.以上仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1